带干扰补偿的转台模糊滑模控制
2018-05-14 13:31刘慧博刘尚磊
电机与控制学报 2018年8期
关键词:模糊控制
刘慧博 刘尚磊

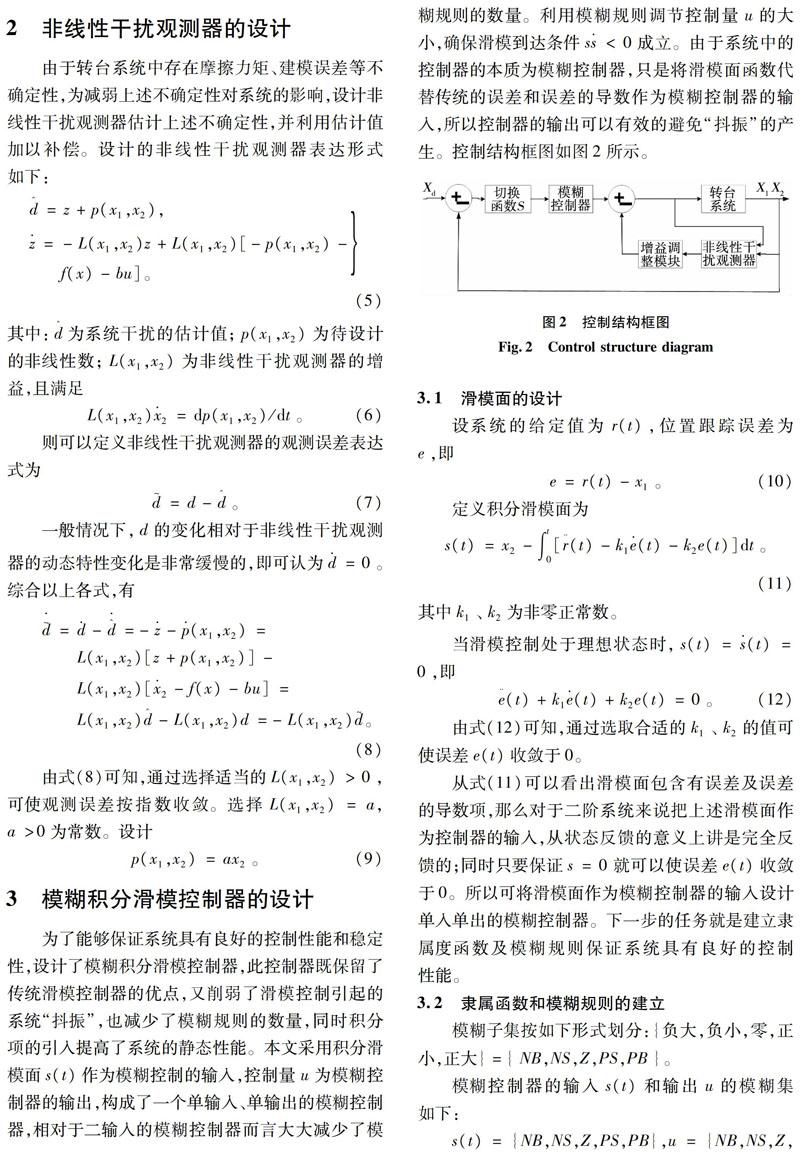
摘 要:针对包含摩擦力矩、建模误差等不确定性的转台系统,提出一种带干扰补偿的模糊积分滑模控制策略。首先设计非线性干扰观测器对系统中的复合干扰进行估计,并利用非线性干擾观测器的估计值对系统进行补偿;其次设计具有积分项的滑模切换函数,积分项的引入提高了系统的静态性能,并将切换函数作为输入设计了单输入模糊控制器,有效减少了模糊规则的数量。仿真结果表明,此控制策略提高了系统的控制性能和抗干扰性,同时有效削弱了滑模控制引起的系统“抖振”。
关键词:转台;非线性干扰观测器;干扰补偿;积分滑模控制;模糊控制
中图分类号:TP 273
文献标志码:A
文章编号:1007-449X(2018)08-0113-06
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
内蒙古教育·职教版(2016年11期)2017-01-05
科学家(2016年3期)2016-12-30
科学与财富(2016年26期)2016-12-01
电脑知识与技术(2016年17期)2016-07-23
电脑知识与技术(2016年7期)2016-05-19
计算技术与自动化(2015年4期)2016-03-25
物联网技术(2015年4期)2015-04-27