基于GPS授时同步的标校系统嵌入式设计
2018-05-11 00:53:04刘爱东李知宇贺林波
电子设计工程 2018年7期
刘爱东 ,李知宇 ,王 丰 ,贺林波
(1.海军航空工程学院201教研室,山东烟台264001;2.海军航空工程学院研究生管理大队,山东烟台264001;3.海军航空工程学院训练部数字化校园办公室,山东烟台264001)
无人机标校作为完成着舰引导系统下滑道一致性检查的一种方式,具有安全有效、操作简单的优点。但架设的标校设备必须具有架设简便、低功率的特性[1]。
在基于无人机的标校系统中,系统的精确授时与同步是非常重要的工作,同时标校系统须完成自身的定位功能。广泛应用的全球定位系统(Global Positioning System),能够在全球范围内广播位置信息和高精度的时间基准[2],同时信息便于采集。因此,基于GPS技术来同步授时标校系统的嵌入式设计方案具有重要的意义。
1 系统工作原理与组成
GPS模块工作时同时接收两种类型的信息,一种是包含UTC标准时间等卫星数据,另一种是GPS秒脉冲信号1PPS,每秒输出一个电平信号,高电平有效,处理器监听秒脉冲电平特性,以获取同步信号,处理器监听秒脉冲信号同时对卫星数据提取UTC标准时间,获取秒脉冲对应的时间信息,并对处理器时钟校时,完成授时功能[3-7]。因此工作原理框图如图1所示。
本文方案选型中,处理器选用现在流行的ARMv8处理器,是ARM公司首推的支持64位指令集的处理器,同时也支持32位的指令,主频1.2 GHz的四核ARM处理器构成整个系统的控制中心,采用5 V直流电供电,全速工作功耗小于3.5 W,搭配1 G的DDR内存,16G的SD卡存储。GPS模块接收芯片采用U-Blox公司的NEO-M8T,用来接收卫星数据与GPS秒脉冲和卫星数据,尺寸为12.2*16 mm,是U-Blox公司推出的高精度授时芯片,授时精度为20 μs。电源方面采用5 V直流电的蓄电池供电。
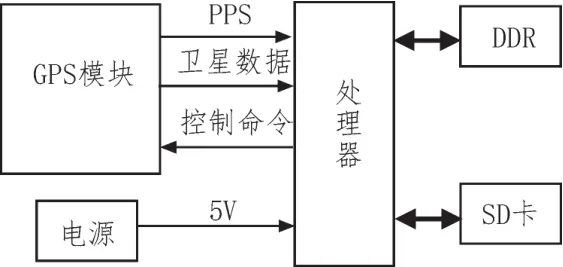
图1 系统原理图
2 系统硬件设计
2.1 稳压电源设计
GPS模块的稳定工作是整个系统稳定工作的基础,GPS模块是高灵敏度模块,对噪声容限度较低,因此对输入电源的稳定性与可靠性提出较高的要求。
本文设计一种稳压电源电路,稳压电路如图2所示。
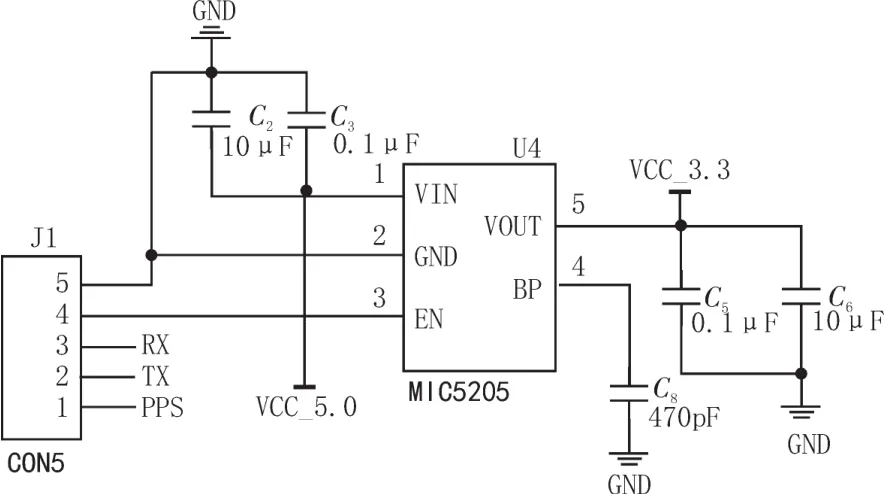
图2 稳压电路图
将ARM处理器所在的微控制板输出5 V电压转换为3.3 V电压,给GPS模块供电,且能对GPS模块提供电源保护功能。选用的MIC5205芯片,是一种有效的噪声输出线性稳压器件,具有去噪和保护电路的优点。
2.2 前置放大电路设计
GPS接收模块接收卫星信号后,需有前置放大电路,用来改善信噪比,前置放大电路如图3所示。
前置放大器是宽带低噪载频放大器,本文选用MAX659ELT类型芯片,是GPS低噪声放大器,具有高增益、低噪声特性,增益19 dB,噪声系数0.8 dB,频率为1 575.42 MHz,可有效提高GPS模块的接收灵敏度[8-10]。
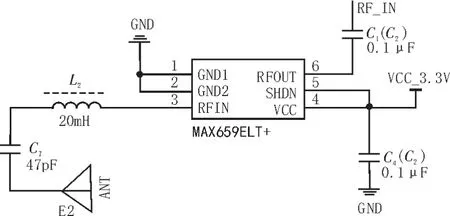
图3 前置放大电路设计
2.3 接口电路设计
本文的方案设计中,需要GPS模块通过串口将接收到的卫星数据传输至ARM处理器,在U-Blox引脚提供串口传输方式中,有UART接口、USB接口等可供选择。标校系统授时同步模块要求串口必须具备传输速率高,可靠性高、稳定性好的特点。在笔者设计的模块输出接口中,二者都有,UART接口的输出如图2所示,但软件设计上最终选择USB接口的输出方式,相比于UART接口,USB2.0接口全速可达12 Mbit/s,抗干扰性能较强,稳定性好[11]。USB接口电路如图4所示:
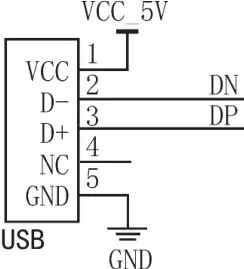
图4 USB接口电路图
为完成基本通信功能,只用到DN,DP,GND引脚即可,接口采用5 V直流电供电。
3 系统软件设计
ARM处理器操作系统为LINUX系统,系统的软件设计也是LINUX系统下编程来完成其授时同步功能[10]。
3.1 读取GPS模块信息
ARM处理器从GPS模块读取两种信息,一种是GPS秒脉冲,每秒输出脉冲信号,高电平有效,ARM处理器不断监听GPS模块的PPS引脚,获取GPS秒脉冲信号作为系统同步的时间基准。与此同时处理器不断通过USB接口接收卫星数据,提取GPS秒脉冲对应的UTC标准时间信息来对本地时钟校时,同时存储接收的卫星数据至文件中,以事后处理数据[11-16]。为完成上述功能,本文设计了一种多线程读取GPS模块输出信息完成的方式。其主要代码如下所示:
3.2 授时同步
3.2.1 UTC标准时间
GPS模块输出的卫星数据中,包括国际海洋电子协会提出的NMEA0183格式数据[13-16]。该协议采用 ASCII码,数据位 8 bit,开始位 1 bit,停止位 1 bit。GPS模块每秒输出这种格式数据,包含位置坐标信息和UTC标准时间信息。数据每行都以$开头,后面紧跟数据信息,对标校系统授时同步功能模块来说,最重要的是$GPGGA开头的语句,其数据格式为
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>*<15><CR><LF>
其中重要的数据有:
<1>UTC时间,格式为hhmmss.sss。(给出单位至毫秒的时间精度)
<2>纬度,格式为ddmm.mmmm(前导位数不足则补0)。
<3>纬度半球,N或S(北纬或南纬)。
<4>经度,格式为dddmm.mmmm(前导位数不足则补0)。
<5>经度半球,E或W(东经或西经)。
可提取UTC标准时间,对标校系统授时。
3.2.2 GPS秒脉冲
GPS秒脉冲是系统同步重要时间基准,同步精度很高,其脉冲前沿与国际标准时间的同步误差不超过1 ms,输出高电平有效3.3 V[17-19],为检测设计的GPS模块输出GPS秒脉冲信号的特性,采用示波器读取所设计系统输出的GPS秒脉冲的波形,并进行分析,波形如图5所示。
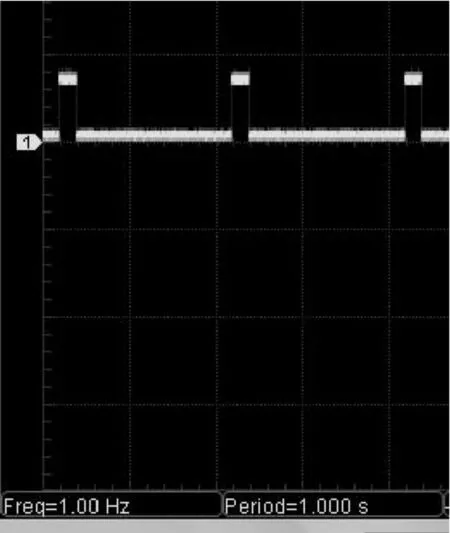
图5 GPS秒脉冲波形
从波形图得知,笔者设计的GPS模块输出的GPS秒脉冲频率为1 Hz,高电平100 ms,低电平900 ms,频率稳定,可靠性高,能够作为标校系统同步的时间信号。
3.2.3 实验结果
处理器在监听到GPS秒脉冲信号后,分析语句$GPGGA开头的UTC标准时间,同时获取LINUX系统内核时钟,然后与本地时钟比较,得出时钟偏差并校正本地时钟,随着监听GPS秒脉冲次数的增加,最终使本地的时钟与UTC标准时间一致,完成系统的授时同步功能,测试的偏差量如表1所示。
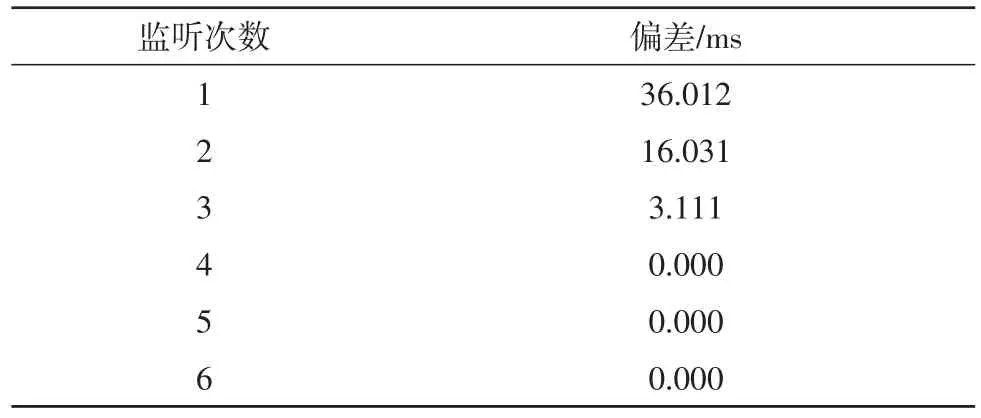
表1 时间偏差量
在完成授时同步功能同时,处理器将GPS模块接收的卫星数据存储至SD卡中,以作后续的数据处理用,采集存储卫星数据实验结果如图所示6所示。
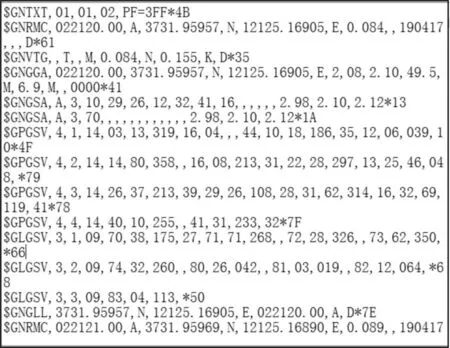
图6 GPS模块采集卫星数据图
4 结 论
文中针对基于无人机的标校系统中授时同步问题,结合应用的条件分析,提出基于GPS技术来授时同步的嵌入式设计方案,采用U-Blox公司芯片设计GPS模块,采用ARM处理器作为核心控制器完成GPS模块输出信息采集并对标校系统授时同步功能,采用嵌入式开发有关技术完成方案软硬件设计。实验结果表明:系统可靠性高,能够完成系统的授时同步功能。该方案具有体积小、架设方便、功耗低、便于无人机架设的优点。
参考文献:
[1]钟兴泉.航母着舰引导系统标校方法研究[J].现代导航,2014,5(3):175-178.
[2]桑德一,赵建军,杨立斌.基于EMD和GPS的着舰引导系统雷达标校方法[J].计算机与数字工程,2014,42(10):1869-1874.
[3]郑国勇.嵌入式GPS接收机研制[D].广州:华南理工大学,2009.
[4]白中英.计算机组成原理[M].北京:科学出版社,2012.
[5]张福炎.嵌入式系统开发技术[M].北京:高等教育出版社,2015.
[6]常莉.基于ARM的静态测量型GPS接收机设计[D].武汉:中国地质大学,2009.
[7]陈丕龙,韩焱.基于GPS时钟同步的计时脉冲信号发生器设计[J].计算机测量与控制,2010,18(11):2675-2680.
[8]李朝青.单片机&DSP外围数字IC技术手册[M].北京:北京航空航天大学出版社,2003.
[9]陈育超,黄海生,张斌.基于FPGA的GPS数据采集器的设计实现[J].电子设计工程,2014,22(22):97-100.
[10]江俊辉.基于ARM的嵌入式系统硬件设计[J].微计算机信息,2005,21(7-2):420-422.
[11]黄燕妮,王少云.USB、RS232/RS422接口转换电路设计[J].电子设计工程,2012,20(22):27-29.
[12]刘天泉.嵌入式系统软件设计方法研究应用[D].浙江:浙江大学,2004.
[13]袁建平,罗建军,越晓奎.卫星导航原理与应用[M].北京:中国宇航出版社,2009.
[14]高成发,胡伍生.卫星导航定位原理与应用[M].北京:人民交通出版社,2011.
[15]胡涛,张立新,蒙艳松.GPS和Galileo导航电文设计分析[J].电子设计工程,2013,21(22):84-87.
[16]钱德俊,张哲,胡晨.NMEA0183协议解析[J].电子器件,2007,4(2):698-701.
[17]邓伟,翁子凡.基于GPS接收机的NTP网络授时精度测量[J].软件,2014,35(11):82-85.
[18]孙海文,欧阳中辉,杜亚杰.载波相位DGPS标校系统时间同步设计与仿真[J].海军航空工程学院学报,2015,30(4):336-340.
[19]刘珅,王孜,朱晓岭,等.北斗卫星导航系统在配电终端状态监测中的设计及应用[J].电力信息与通信技术,2016(12):90-94.
猜你喜欢
数学小灵通·3-4年级(2021年9期)2021-10-12 05:47:46
科学技术创新(2021年11期)2021-05-25 10:04:18
小学生学习指导(低年级)(2020年10期)2020-11-09 09:21:58
电子制作(2019年7期)2019-04-25 13:17:42
宇航计测技术(2018年3期)2018-09-08 02:21:32
铁道通信信号(2018年2期)2018-04-18 12:18:23
数学大王·中高年级(2017年2期)2017-02-08 15:52:55
电镀与环保(2016年3期)2017-01-20 08:15:32
学苑创造·A版(2016年4期)2016-04-16 17:57:51
海军航空大学学报(2015年4期)2015-02-27 13:45:50