
卫星信号模拟器测试高动态GPS精度方法研究
2018-05-10 18:42孟巍
数字通信世界 2018年4期
孟 巍
(中国人民解放军92941部队43分队,葫芦岛 125001)
1 引言
GNSS系统以其全球性、全天候、高精度、高可靠性等特点广泛应用于军事、经济、科研和社会生活方方面面。高动态GPS定位精度的评定方法因真值难以获得,搭载试验成本高昂等因素制约而无法获得,是急需解决的难点问题,卫星信号模拟器是一种卫星导航测试领域公认的GNSS性能测试和精度鉴定工具,具备GNSS定位终端精度评定能力,通过构建测试场景,对被试设备进行精度评定,评定结果并与外场试验结果对比验证,验证卫星信号模拟器方法的科学性和有效性,为高动态GPS定位精度评定提供一种新的方法。
2 火箭撬搭载试验
火箭撬试验是将被试设备安装在火箭滑车撬体上,通过火箭发动机对火箭滑车撬体进行推进,模拟载体实际运行时大过载力学环境下的工作特性,考核撬体上被试设备功能。[5]火箭撬搭载试验的试验场地隶属某航空救生装备有限公司。火箭撬滑轨全长6.1千米,直线精度0.2毫米以内,最大承重4吨,最大速度为2.8马赫。试验测试的高动态GPS接收机由高动态OEM板卡(单频L1;最大加速度30g;最大速度不受限制;数据更新率20Hz)、MP1270单频航空型GPS天线,2G容量数据记录器及12V/4Ah锂电池组成。搭载试验共进行两次(第一次2015年7月31日上午10时进行;第二次2015年8月1日上午9时45分进行)。
被试GPS天线相位中心相对于火箭滑车霍尔器件的位置经测量为长2.4米,宽0.14米,高1.95米。数据处理时通过坐标转换将天线相位中心点与真值点进行归化解算。基准点位置坐标为(WGS-84 坐标系):
LAT :32°24′03.3136″N ;
LON :112°08′10.6731″E ;
H:117.716m。
经过对被试GPS接收机测量数据与真值数据
进行比对,被试GPS接收机事后差分定位精度及单点定位精度详见表1和表2。
3 卫星信号模拟器测试
依据火箭撬搭载试验,应用卫星信号模拟器模拟火箭滑车撬体试验运动过程,测试高动态GPS接收机在此环境下的动态定位精度。

表1 被试GPS接收机事后差分定位精度

表2 被试GPS接收机单点定位精度
3.1 测试方案设计
测试所用设备及型号见表3与表4,设备连接见图2。

表3 测试所用设备及型号

图1 测试方案设备连接图
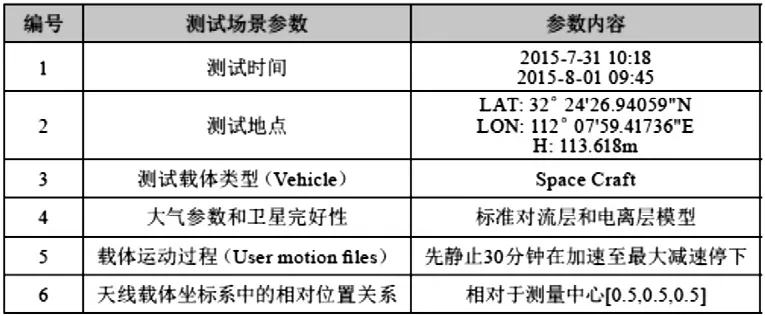
表4 两次火箭撬试验测试场景构建参数及内容
3.2 测试方法步骤
测试场景构建完成后,设备开机运行,接收机和模拟器分别记录定位数据,模拟器通过串口给接收机发送模拟基准站数据,用于事后差分处理。测试运行结束之后,接收机关机,收集整理GNSS接收机的测试数据和GNSS卫星信号模拟器记录的载体运行轨迹的定位数据,按照外场试验数据处理方式分别进行单点定位精度和事后差分定位精度处理。

表5 被测试接收机机动动作及测试情况表
3.3 测试结果

表6 被试GPS接收机事后差分动态精度定位精度

表7 被试GPS接收机单点定位精度
4 结果比对

表8 火箭撬搭载试验与卫星信号模拟器测试结果对比
5 结束语
根据火箭撬搭载试验结果与卫星信号模拟器测试的结果分析可知,高动态GPS接收机火箭撬搭载试验和卫星信号模拟器测试的定位精度基本一致,单点定位结果达到米级,事后差分定位精度达到分米级(0.3m)。可应用此方法对高动态GPS接收机进行精度评定。
[1] 周忠谟.GPS卫星测量原理与应用.北京:测绘出版社,1999.
[2] 赵琳,丁继成.卫星导航原理及应用.西安:西北工业大学出版社,2010.
[3] 刘基余.GPS卫星导航定位原理及方法.北京:科学出版社,2002.
[4] 王永良,丁前军,李荣峰.自适应阵列信号处理.北京:清华大学出版社,2009.
[5] 唐瑞.GPS技术在高速火箭橇试验测速系统中的应用.文件编号CARS-2013-1509.
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
中国惯性技术学报(2020年2期)2020-07-24
山东冶金(2019年5期)2019-11-16
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
雷达学报(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
