基于改进型非奇异模糊终端滑模观测器的PMSM无传感器控制
2018-05-10 09:19:43李江波刘述喜陈渝光
重庆理工大学学报(自然科学) 2018年4期
李江波,刘述喜,陈渝光
(重庆理工大学 电气与电子工程学院, 重庆 400054)
永磁同步电机具有功率密度大、可靠性高、能量转换效率高等优点[1],在新能源领域得到了普遍的应用。为了方便有效地对永磁同步电机进行驱动控制,必须利用转子位置信号进行相应的坐标变换[2]。侯勇等[3]将终端滑模控制运用到永磁同步电机控制系统中,虽然系统能在有限时间内达到稳定状态,但状态偏差极小时要求控制量无限大。袁雷等[4]将非奇异终端滑模控制运用于电机转子速度和位置的观测,在保证非奇异的同时也能让系统状态在有限时间内稳定,但是存在收敛速度较慢的问题。米文鹏等[5]对传统非奇异终端滑模控制进行了改进,缩短了系统状态达到稳定的时间。陆婋泉等[6]采用准滑模控制,以各种饱和函数代替开关函数,有效地降低了抖振。张磊等[7]以模糊控制的思想对滑模增益进行实时优化,得到了更好的观测效果。张洪帅等[8]根据扩展反电动势和转子磁链直接计算得到转速,虽然简单方便,但是观测精度极易受电机参数变化的影响。鲁文其等[9]根据分数阶PI控制器的原理设计出分数阶锁相环,得到了比传统锁相环更好的动态性能,但是分数阶PI控制器的参数整定复杂[10]。周永勤等[11]设计出带积分反馈的锁相环,虽然在静态时平滑了观测信号,但是包含的滞后环节较多,在电机高速运行时延迟问题不能忽略。李冉等[12]和李卓敏[13]对锁相环等效模型的开环增益进行了固定,使系统在不同的转速下都保持较理想的频率特性,但是没有对锁相环处于某一特定工况下的性能进行优化。
本文通过分析传统非奇异终端滑模控制中系统状态在滑模面内的收敛特性,并计算其收敛时间,以减小收敛时间为目的,设计出改进的非奇异终端滑模面;分析不同状态时观测器控制增益对观测性能的影响,结合模糊控制的优点,用模糊控制对观测器控制增益进行实时优化;在传统锁相环等效模型的基础上,以前馈控制的思想对锁相环进行优化,设计出改进型锁相环;建立基于优化后的永磁同步电机无传感器控制系统的仿真模型并仿真,验证所改进方案的正确性。
1 永磁同步电机数学模型
面贴式PMSM在两相静止坐标系下的电流方程为
(1)
式中:
Eα=-ωe·Ψ·sinθe
Eβ=ωe·Ψ·cosθe
(2)
式中:iα、iβ和uα、uβ分别为α轴与β轴的定子电流和电压分量;R为定子电阻;L为定子电感;Eα、Eβ分别为α轴与β轴上的扩展反电动势分量;we为电角速度;Ψ为永磁体磁链;θe为电角度。
α-β坐标系下PMSM的电流方程含有电机转子和位置信息,因此可以在该数学模型的基础上设计滑模观测器,对转子信号进行提取。
2 改进型非奇异终端滑模观测器
2.1 滑模面的建立
建立SMO的观测模型为:
(3)
式中:带有上标“^”的量为式(1)中对应的观测量;uα、uβ为观测器的控制输入。
将式(3)减去式(1)得
(4)

传统非奇异终端滑模面为
(5)
式中:β>0,p、q均为正奇数且1
当状态偏差幅值较大时,式(5)中第1项起主要作用,决定观测器控制量的变化方向和大小;状态偏差变化率大时,式(5)中第2项起主要作用,对系统状态的控制具有超前性,合理地选择β的大小可以有效地减少单位时间内运动点对滑模面的穿越次数。然而,当系统平稳地处于低偏差状态时,式(5)中2项的控制作用都不明显,造成系统状态的收敛时间较长。
为了解决上述问题,对以上终端滑模面进行一定的改进。改进型滑模面函数为
(6)
式中α>0。
2.2 控制函数的求取
(7)
式(7)中第一部分恒大于0,只要后2部分的乘积恒小于0,则观测器稳定。通过观察,可以得到一个满足李雅普诺夫稳定条件的控制量:
(8)
2.3 收敛时间计算
(9)
进而得到

(10)
两边同时积分得
(11)
其中:t0和f0与初始时刻对应,t0+t和ft与最终平衡状态相对应。进一步解析得
最终得到收敛时间为
(12)
同理可得传统非奇异终端滑模控制在滑模面内的收敛时间为
(13)
对比式(12)与式(13)可知,2种观测器都能在有限时间内收敛到稳定状态,但改进型非奇异终端SMO的收敛时间比传统非奇异终端SMO的收敛时间更短。
李云燕等[16]用半枫荷散组以半枫荷散(由半枫荷根、荆芥、防风、乳香、胡椒根各等份组成,将诸药制成散剂,加白酒和陈醋浸泡7 d后备用)治疗膝关节骨性关节炎,其治疗的愈显率为68%,且总有效率达到90%。认为半枫荷散治疗膝关节骨性关节炎,作用迅速,疗效显著,而且价格低廉,具有推广应用价值。
3 观测器控制增益的优化
以模糊控制的思想优化滑模增益的目的是使观测偏差快速趋近于0,先让滑模观测器的运动点快速到达滑模面,然后观测偏差自动按负指数规律衰减。但是,当运动点趋于滑模面时运动速度要慢,以防止因过于频繁穿越而造成高频抖振。为此,可以通过模糊控制对滑模增益进行实时优化,使系统状态快速平稳地到达滑模面,提高观测信号的质量。
本文应用Matlab的模糊控制工具箱实现对控制增益的优化。以|s|和d|s|/dt作为模糊控制器的输入,滑模增益的优化项Δk作为模糊控制器的输出,设计一个双输入单输出的模糊控制器。其中:|s|、d|s|/dt、Δk的隶属函数分别如图1~3所示。图中选择三角形隶属度函数[9]。
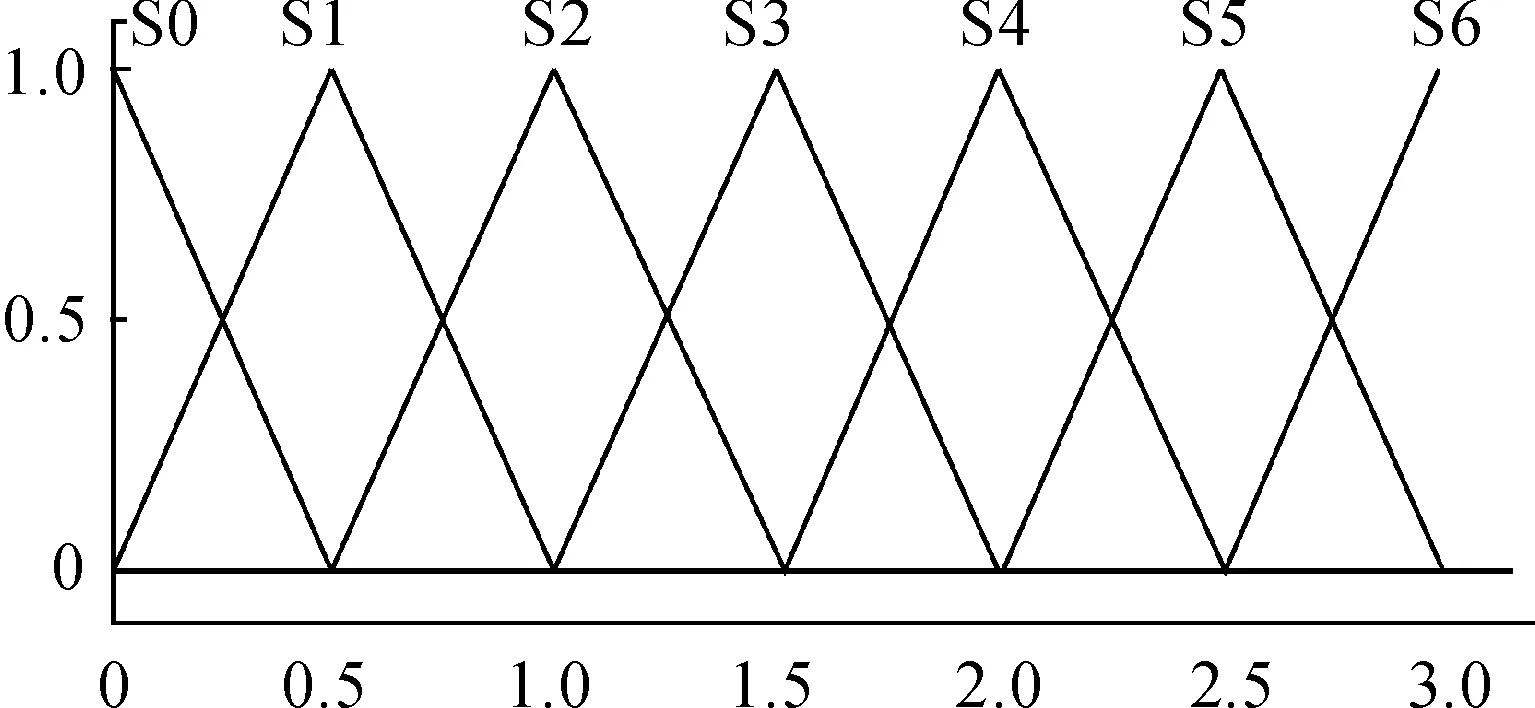
图1 输入量|s|及其隶属度函数
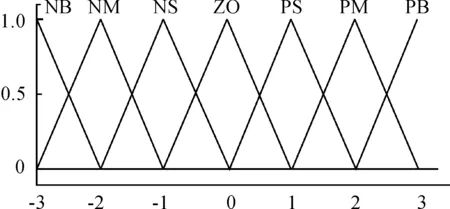
图2 输入量d|s|/dt及其隶属度函数
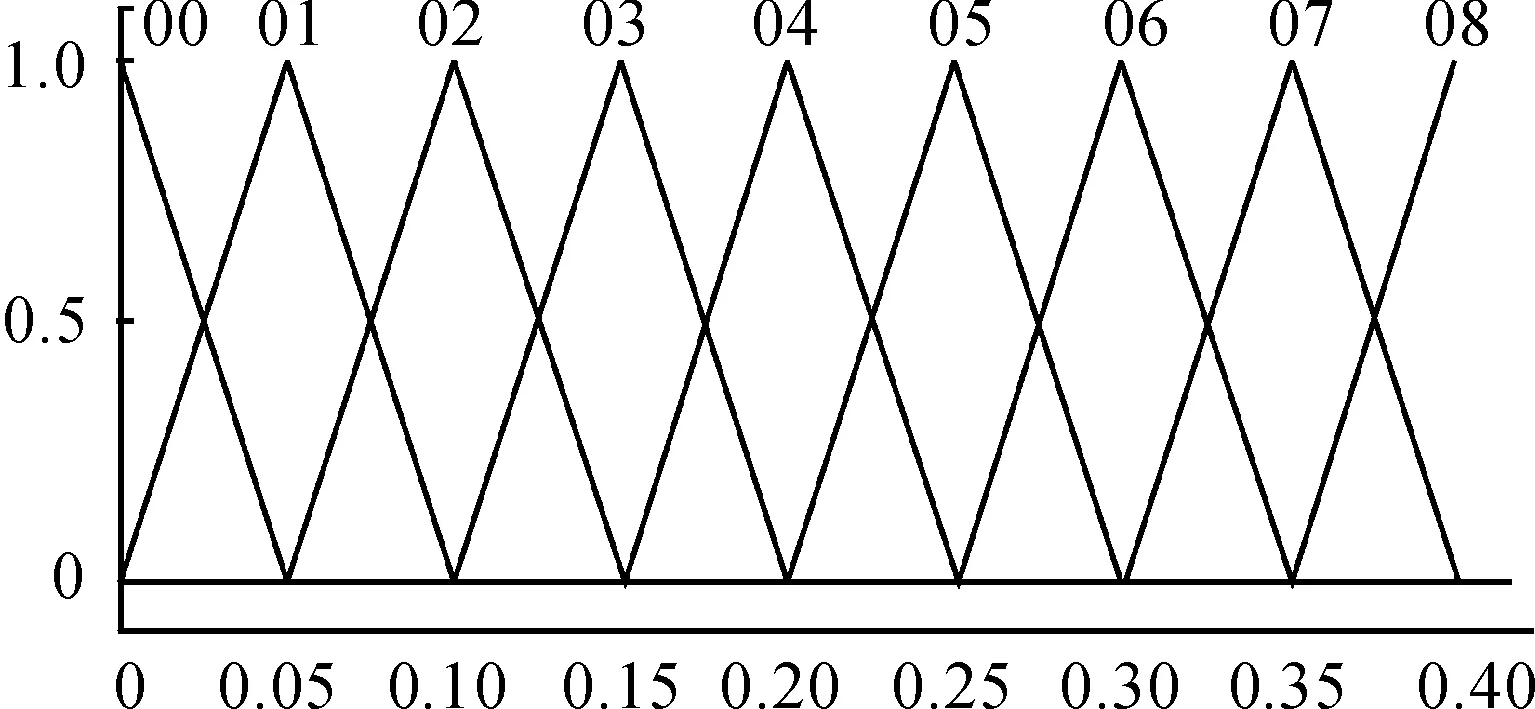
图3 输出量Δk及其隶属度函数
观测器运动点远离滑模面时,需要选择较大的滑模增益,提高观测器运动点的趋近速度;在靠近滑模面的区域内,滑模增益不宜选择过大,减弱因s的正负性频繁变化造成的高频抖振。为了达到以上效果,设计出如表1所示的模糊推理规则。

表1 模糊规则
由模糊规则表可以看出,增益优化项Δk与|s|的关系近似为饱和函数的分段线性逼近,但Δk同时受d|s|/dt的影响,在|s|一定的情况下,若d|s|/dt的数值增大,则Δk正向增大;若d|s|/dt的数值减小,则Δk正向减小。这样使得观测器的控制作用具有一定的超前性,提高了观测器的跟踪性能。优化后开关函数的增益为
k=η×(1+Δk)+d
(14)
4 新型锁相环的设计
本文设计了一种新型锁相环对速度和位置信号进行提取,其结构如图4所示。

图4 新型锁相环的结构
通过观测电动势的幅值和转子理论磁链幅值可以直接计算出一个估算转速,并以该估算值作为前馈量。直接计算得到的估计转速为
(15)
对式(15)进行分析,可以发现:电机动态工作时,受到磁饱和的影响,转子实际的磁链比理论磁链要小,而由式(15)得到的转速比实际转速要小,不会造成转速的过补偿。同时,式(15)中分子的大小在开环增益固定时已经得到,没有增加过多额外的计算量。
5 仿真分析
在Matlab/Simlink中对改进的永磁同步电机无传感器控制系统进行仿真。仿真参数:仿真算法为定步长ode3,仿真步长为8e-7 s,仿真时间为0.5 s。仿真工况为:初始空载由零速度加速到 1 000 r/min,0.35 s时突加5 N·m的负载转矩。电机参数如表2所示。
表2 电机参数
图5为改进型滑模面函数中参数α对定子电流观测偏差的影响。可以看出:改进型终端SMO能更准确快速地跟踪定子电流的实际值,同时α越大,定子电流的观测偏差越小。图6为电机启动时角速度跟踪偏差与参数α的关系。由图6可知,α越大,被观测量对定子电流偏差的变化越敏感,滑模观测器的响应越快,动态过程中对角速度的跟踪偏差也越小。
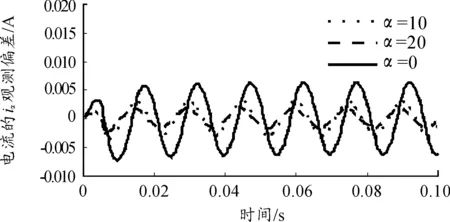
图5 α轴等效电流观测偏差对比
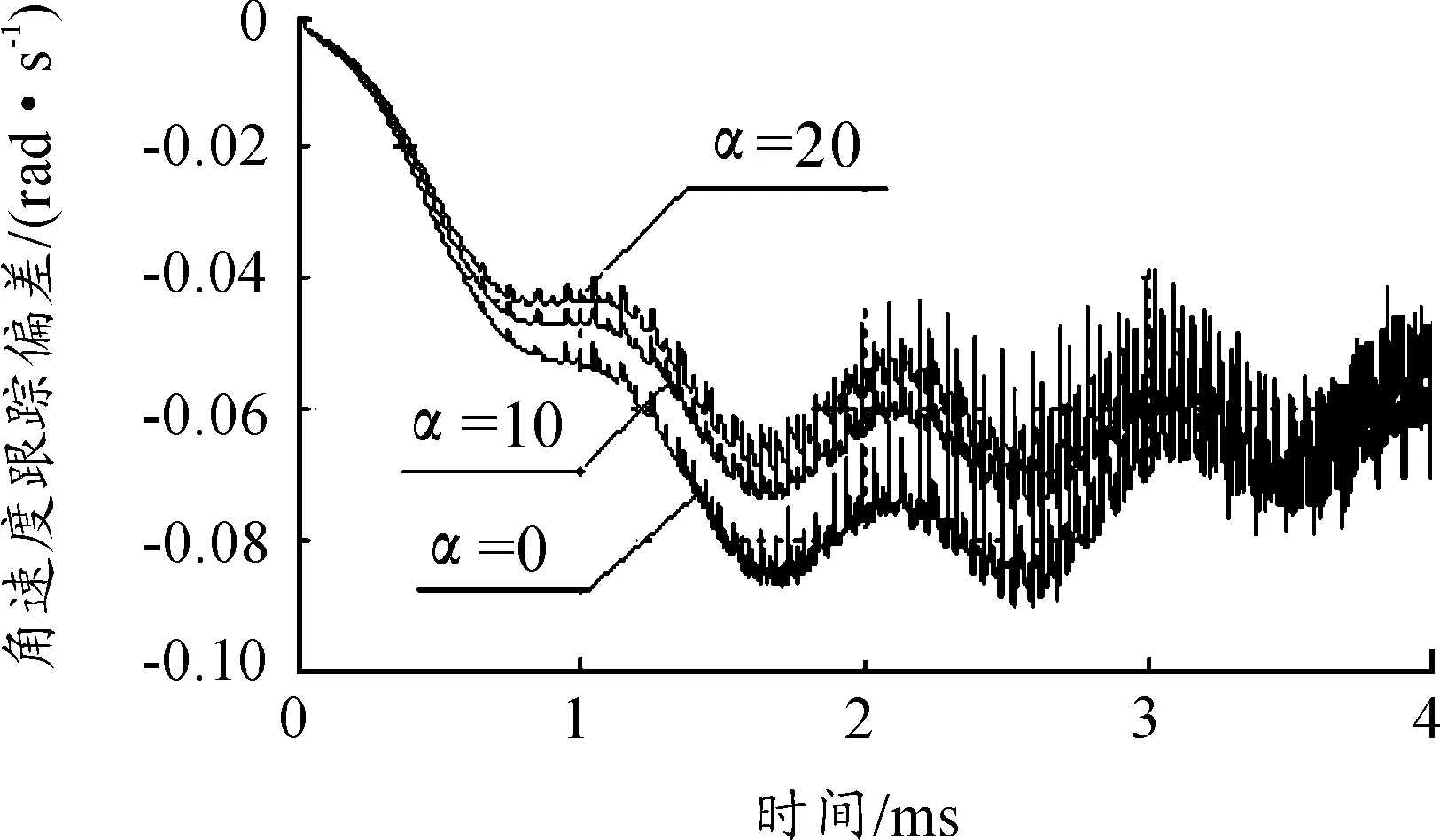
图6 电机启动时角速度跟踪偏差对比
图7、8分别为不带模糊控制增益优化项和带模糊控制增益优化项的电机角速度跟踪偏差。由图7、8对比发现,带模糊控制增益优化项的控制系统跟踪性能好于不带模糊控制增益优化项的控制系统。由于系统存在一定的惯性,图7中出现控制作用滞后的情况,观测偏差不能及时收敛到0;而带模糊控制增益优化项的控制系统考虑了d|s|/dt的影响,克服了以上问题,如图8所示,极少出现观测器控制滞后的现象,跟踪偏差也有所减小。
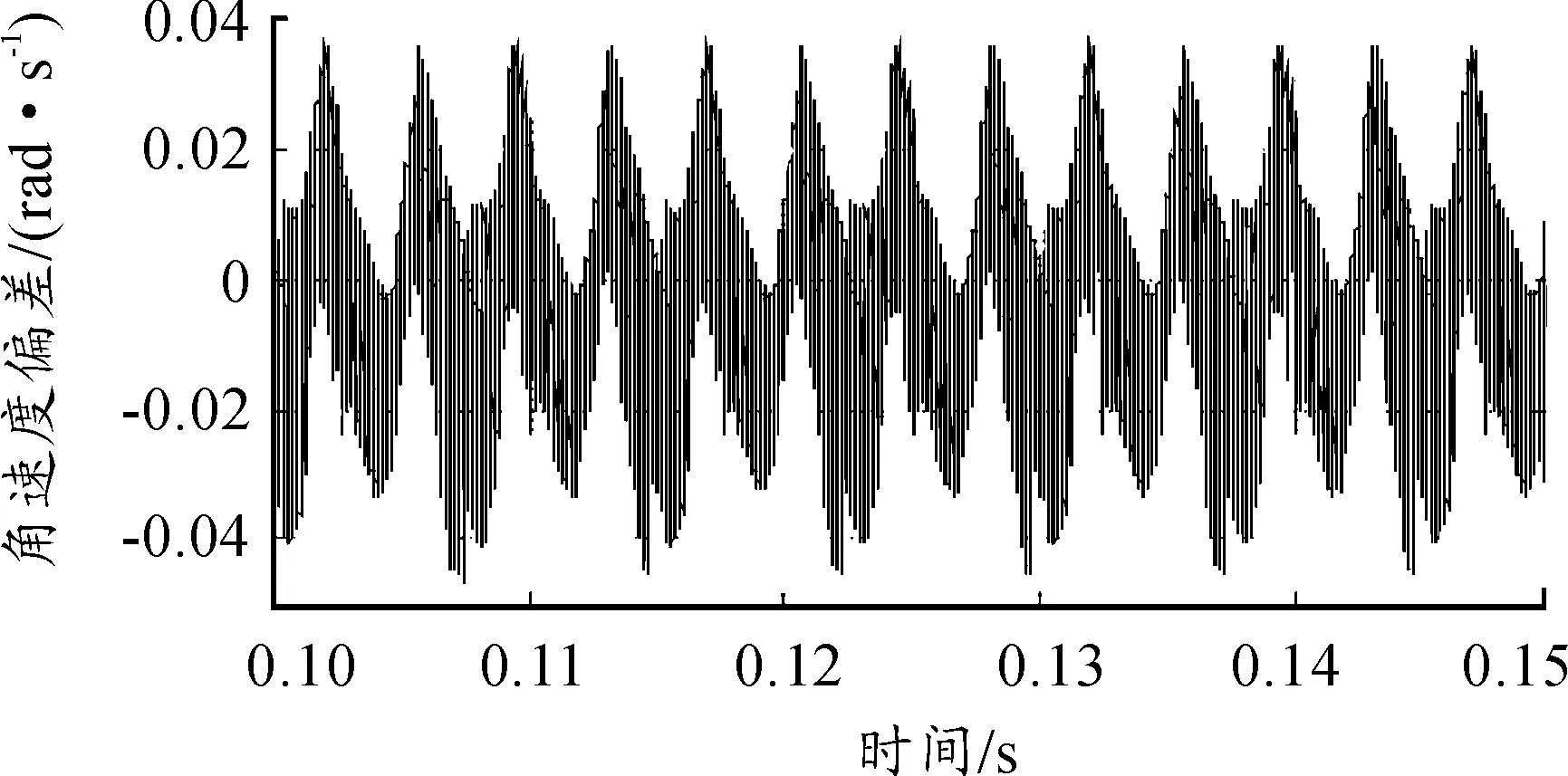
图7 无模糊控制系统角速度跟踪偏差
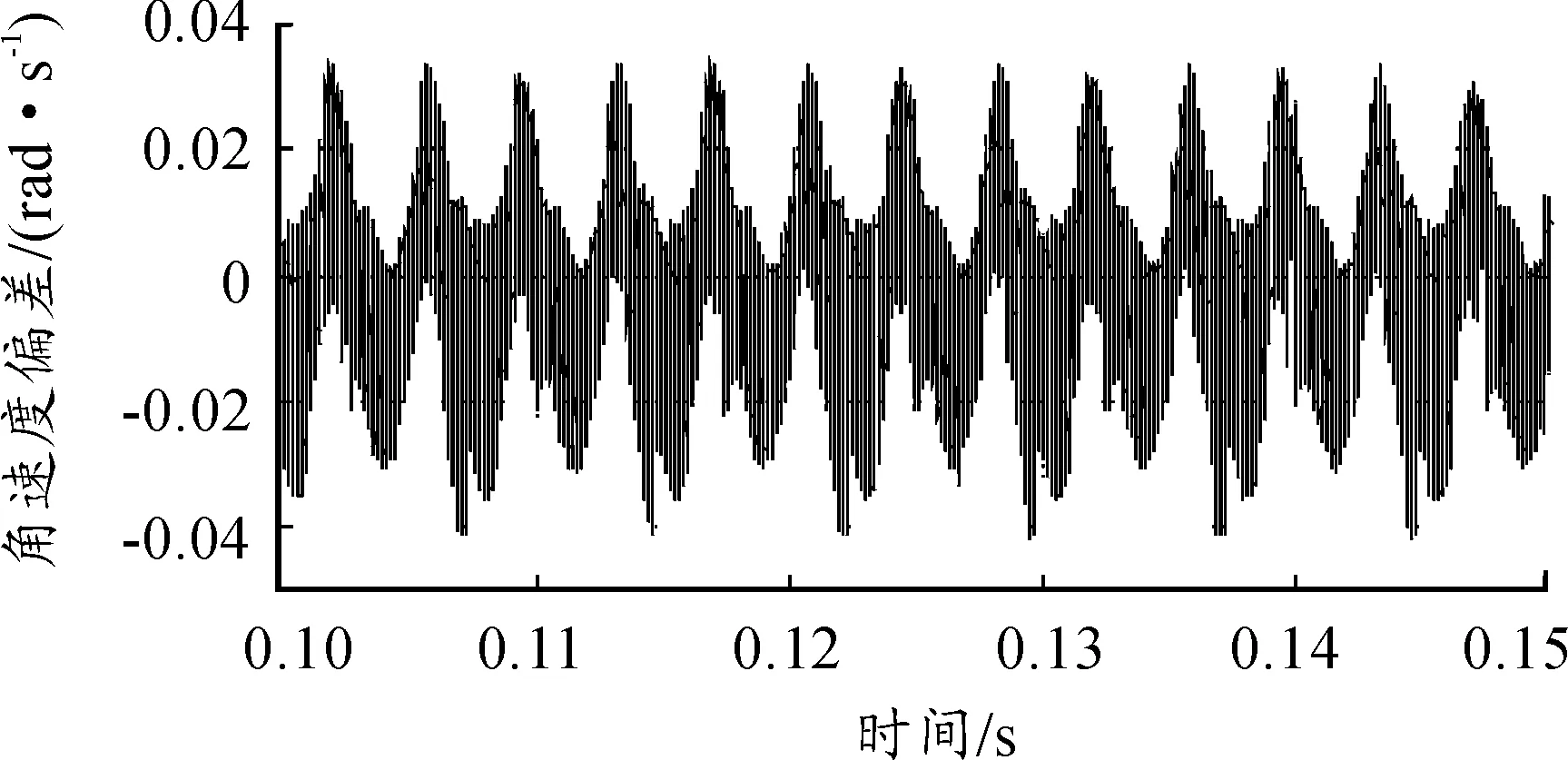
图8 带模糊控制系统角速度跟踪偏差
图9为传统锁相环角速度跟踪偏差,由图9可知,由于观测信号中不可避免地包含高频成分,在保证一定动态性能的情况下,观测信号中含有较多的高频成分。图10为转子磁链准确且开环增益为图9的0.2倍时新型锁相环的角速度跟踪偏差。由图10可知,在保证动态性能的情况下,通过适当降低锁相环的开环增益,提高了锁相环抗高频干扰能力,保证了观测信号的质量。图11为理论磁链比实际磁链大0.1 Wb且开环增益与传统锁相环开环增益相同时,新型锁相环的角速度跟踪偏差。由图11可知,即便理论磁链有一定的偏差,通过前馈控制思想设计出来的新型锁相环依然具有更好的综合性能。
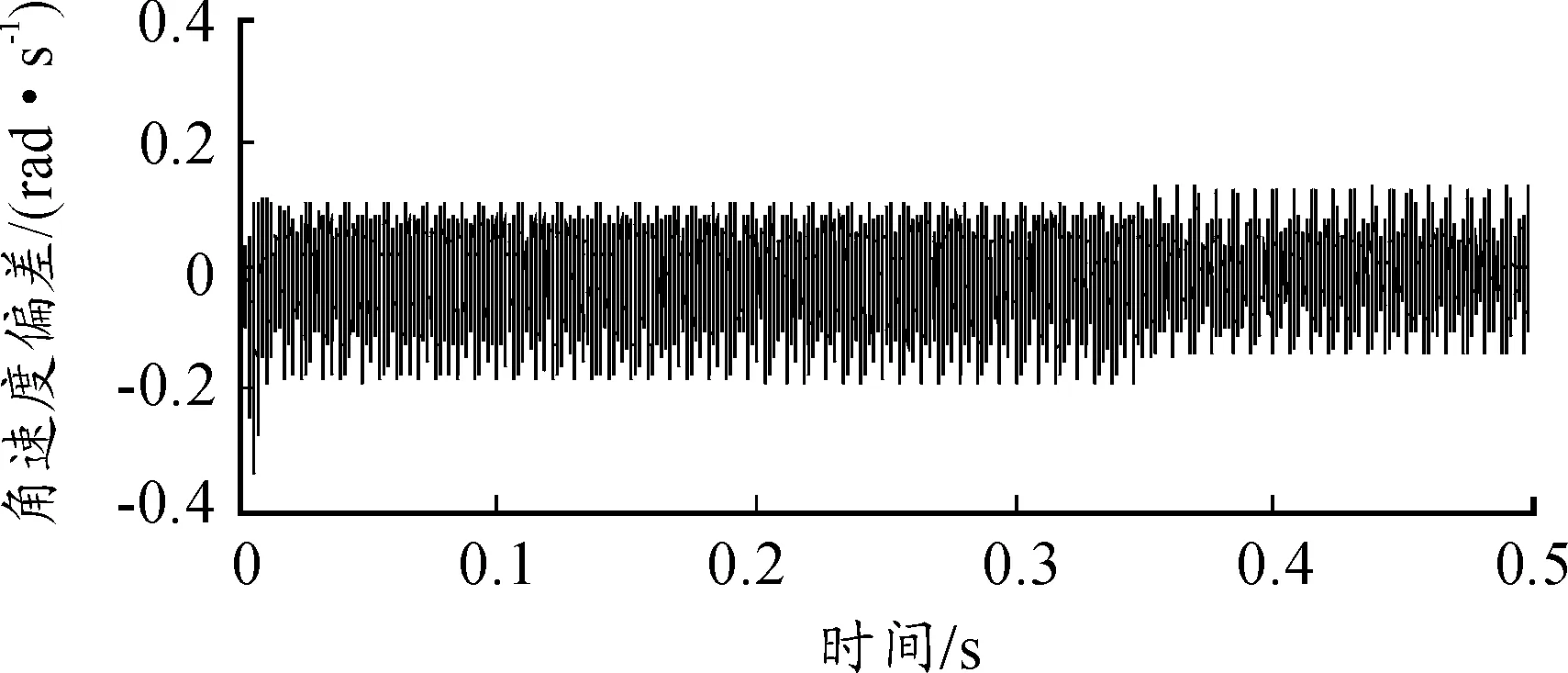
图9 传统锁相环角速度跟踪偏差
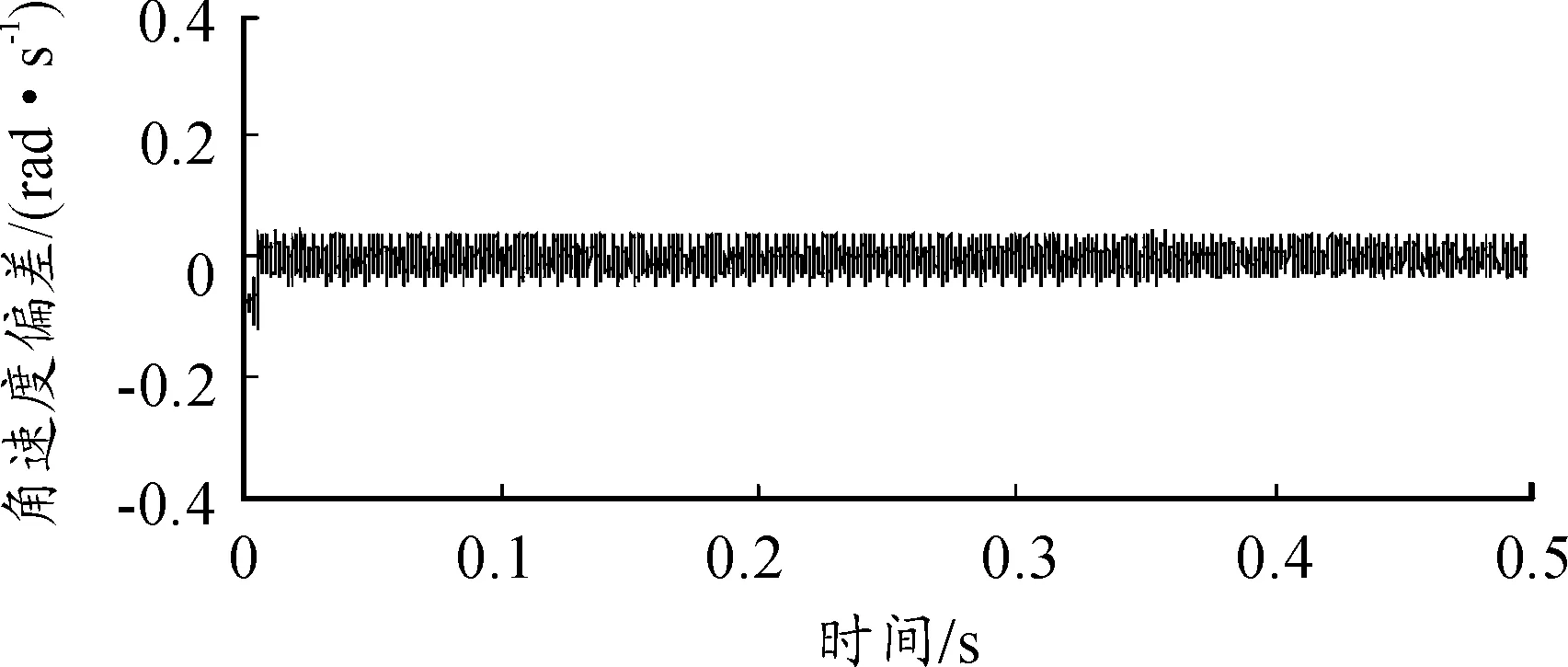
图10 新型锁相环角速度跟踪偏差
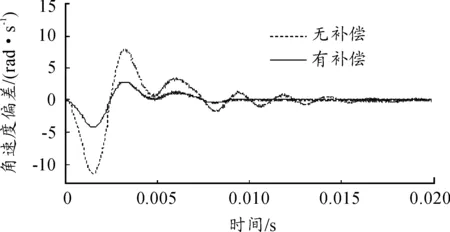
图11 固定增益时2种锁相环角速度跟踪偏差对比
6 结束语
基于改进型非奇异模糊终端SMO的无传感器永磁同步电机系统仿真结果表明:观测偏差在改进型滑模面内具有更快的收敛速度。通过模糊控制对滑模观测器增益进行实时优化,使观测信号更加平稳有效。以前馈控制思想设计的新型锁相环在保证动态性能的前提下,可以选择相对较小的开环增益,从而减小观测信号中高频成分,提高锁相环的综合性能。
参考文献:
[1] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[2] 王成元,夏加宽,杨俊友,等.电机现代控制技术[M].北京:机械工业出版社,2006.
[3] 侯勇,陈少东,毛润华,等.基于终端滑模的永磁同步电机磁场定向控制[J].天津科技大学学报,2017,32(4):67-70.
[4] 袁雷,沈建清,肖飞,等.插入式永磁低速同步电机非奇异终端滑模观测器设计[J].物理学报,2013,62(3):45-53.
[5] 米文鹏,韩奎侠,孔令剑,等.改进型非奇异模糊终端滑模控制及其应用研究[J].导弹与航天运载技术,2015(4):66-68.
[6] 陆婋泉,林鹤云,冯奕,等.永磁同步电机无传感器控制的软开关滑模观测器[J].电工技术学报,2015,30(2):106-113.
[7] 张磊,高春侠.一种变增益宽速度范围的永磁同步电机无位置传感器控制[J].电机与控制学报,2015,19(8):36-40,46.
[8] 张洪帅,王平,韩邦成,等.基于模糊滑模观测器的磁悬浮高速永磁同步电机转子位置检测方法[J].电工技术学报,2014,29(7):147-153.
[9] 鲁文其,胡育文,杜栩杨,等.永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J].中国电机工程学报,2010,30(33):78-83.
[10] 姜春燕,周洁敏,周迪,等.基于分数阶的航空用三相电压型整流器设计[J].航空计算技术,2015,45(6):91-94.
[11] 周永勤,崔延光,王旭东,等.永磁同步电机无位置传感器模糊滑模观测技术[J].哈尔滨工程大学学报,2013,34(6):728-733.
[12] 李冉,龙雪涛,陈辉.基于锁相环的永磁同步电机无传感器控制[J].电气传动,2013,43(8):8-12.
[13] 李卓敏.永磁同步电机转子位置观测误差自适应补偿方法研究[D].哈尔滨:哈尔滨工业大学,2014.
猜你喜欢
防爆电机(2020年6期)2020-12-14 07:16:54
电子测试(2018年14期)2018-09-26 06:04:00
电测与仪表(2017年24期)2017-12-19 05:15:22
光学精密工程(2016年3期)2016-11-07 09:03:49
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年9期)2015-04-09 11:59:28
电测与仪表(2015年19期)2015-04-09 11:32:56
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年11期)2014-04-04 09:21:36