浅谈多旋翼无人机用于无人机违规飞行捕捉
2018-04-27 08:19付仲良
地理空间信息 2018年4期
洪 宸,付仲良
(1.华中科技大学附属中学,湖北 武汉 430074; 2.武汉大学遥感信息工程学院,湖北 武汉 430079)
无人机是利用无线电设备与程序控制装置操控的飞机,包括无人直升机、多旋翼无人机等,可以完成复杂的空中飞行任务和各种负载任务[1]。上世纪30年代以来,国外首次采用无线电操控飞机模型作为靶机,随后无人机的发展十分迅速,中国对无人机的研制与开发也加快了步伐[2]。然而,一些企业、个人的小微型无人机违规飞行时常发生,引发空中险情,甚至危及军民航飞安全和公共安全[3]。
1 对无人机违规飞行的应对
随着无人机的广泛应用,部分无人机违规飞行造成的险情不断增加。为此,美国不仅设置了无人机禁飞区,对违规飞行人员实行重罚和刑事指控,同时对小型无人机要求实名注册。澳大利亚官方规定普通无人机的飞行高度必须在120 m之内。荷兰警方专门训练老鹰将无人机当作猎物去捕捉。法国空军成立金雕培训小组,利用具有凶猛捕猎能力的金雕控制违规飞行的无人机。
我国民用机场管理条例规定,机场跑道中心线两侧各10 km、跑道端外20 km的区域为 “净空区”,净空区内禁止无人机、风筝、孔明灯等飞行物,一旦抓获,将处以2万元以上10万元以下的罚款。如果施放的飞行器影响到航班安全或者带来安全事故,最高量刑可至死刑。无人机飞行,即使在净空区以外区域,也必须具备相应条件。依据《民用无人驾驶航空器系统驾驶员管理暂行规定》、《中华人民共和国飞行基本规则》、《民用无人驾驶航空器实名登记管理规定》,使用者不仅须持民用无人机驾驶执照[4],飞行前还必须向空管部门提出申请,经批准后方可实施[5,6]。
2 捕捉型无人机的设计
2.1 机身的设计
机身结构应高度一体化,具备防水、防雷、抗风、抗摔、抗磁的性能[7]。机身重量也是影响其续航能力的主要因素,其动力系统在整机重量中占了很大比例。机身材料方面,在保证强度和稳定性的前提下,优先选择密度小的材料。相同重量下,尺寸与速度、能耗成反比,因此在进行机身设计时应充分考虑空气动力学,采用科学的最优化设计,确保飞行稳定性。此外,机身受到的空气阻力作用和能耗之间的关系也不容忽视。
机身采用多旋翼设计,转速极高,故有外壳保护装置,保护人员安全。多旋翼机身多采用蓄电池供电,而充电过程需要时间,这也是影响无人机使用率的因素之一。随着科技的发展,无线充电技术和快速充电技术将步入实用阶段,将这两项技术应用到无人机,其使用率会得到大幅提高。
如图1所示,在支撑器(1)的下部前面和侧面分别设置第一距离传感器(7)和第二距离传感器(2);支撑器顶部均匀设置不少于4个螺旋桨电机(9),螺旋桨电机上方设置螺旋桨(8);支撑器下方设置支撑腿(6),支撑腿下端设置防震垫片(5);支撑器下端中央设置中空的气囊弹射器(3);气囊弹射器下端设置盖子(4),内层设置与气囊弹射器内壁紧贴的气体发生材料层(14),上端设置点火装置(17),点火装置通过导线(16)连接支撑器内部设置的微处理器,气囊弹射器的下端设置过滤网(15);支撑器的内部设置微处理器和电源,第一距离传感器(7)、第二距离传感器(2)、螺旋桨电机(9)、点火装置(17)连接微处理器;在气囊弹射器的下侧设置与气囊弹射器中空部分连通的气囊(10),下端四周均匀设置不少于4条弹力线(11),在弹力线末端设置弹力球(12),在弹力球内部设置磁铁(13)。
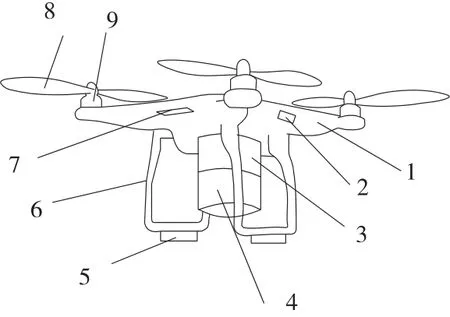
图1 捕捉型无人机结构示意图

图2 无人机捕获装置开始捕获时的结构示意图
2.2 捕捉装置设计
1)如图2所示,在支撑器1的下端中央设置中空气囊弹射器3;气囊弹射器下端设置盖子4,内层设置与气囊弹射器内壁紧贴的气体发生材料层14,上端设置点火装置17,点火装置通过导线16连接支撑器内部设置的微处理器;所述气囊弹射器的下端设置过滤网15,下侧设置与气囊弹射器中空部分连通的气囊10,在气囊弹射器下端四周均匀设置不少于4条弹力线11,在弹力线末端设置弹力球12,在所述弹力球的内部设置磁铁13。当本无人机捕获装置到达适合的位置时,点火装置17点火,气体发生材料层14在短时间内产生大量气体,使得气囊10迅速通气膨胀,顶开盖子4,并将弹力线11和弹力球12向目标无人机弹射,使弹力线11和弹力球12将目标无人机缠绕,从而实现捕获功能。所述弹力球的内部设置磁铁13使得弹力球之间互相吸引,使缠绕紧固。当违规飞行无人机旋翼停止旋转失去动力或动力不足,捕捉无人机即可将其吊行至指定地点。
若违规无人机自重大于捕捉无人机动力,发生下坠情况时,捕捉装置的绳索可自动脱离捕捉无人机,使违规无人机自由落体,保证捕捉无人机的安全。
2)机身配备电子干扰设备,通过干扰违规无人机的航线设计和指令,短时间内改变其飞行路线,使其飞行、降落至指定地点。
3)若因捕捉带来故障,设计了保险装置可让无人机飞回基地。捕捉过程中,某种因素触发开启该装置,捕捉无人机立刻切断外界通讯,执行强制返回指令,并且安全、缓慢地降落至基地。此外,还配备了降落伞装置,当机身失重下坠时,可立即开启降落伞,保障执法、搜救和救援的开展。
2.3 控制系统设计
无人机要在复杂条件下完成自主导航,必须具备环境感知能力和学习适应能力。分配、应急处理、协调、目标识别、通讯是自主飞行系统的关键技术,通过黑匣子系统装置,飞行数据得以收集。调度中心将飞行数据处理和分析,建立大数据云。一旦发生紧急情况,无人机可把现场数据传回调度中心,通过与云数据比对分析,作出应急反应。随着飞行时间的增长和飞行环境的增多,捕捉型无人机持续、反复学习,进而变得更加智能化。
2.4 控制基站的设计
通过专有基站进行通信,建立专有通信网,采用数字加密信号,从而确保捕捉型无人机通信系统的稳定。在专有通信网发生故障时,无人机还可紧急启用第二种通信方式,即调用民用4G通信网络来联通无人机,保证飞行安全。
另外,城市用地十分紧张,对于已建成的居民区而言,可利用的公共空间越来越少。专有基站的设计不仅降低空间占用率,也做到功能整合,使其成为城市公共设施,兼顾城市景观,外观设计上符合大众审美需求,达到美观性、标志性的要求。
3 结 语
无人机及其系统本身具有很大的拓展空间,潜在的社会和经济价值巨大。随着新材料、电池和导航技术的发展,多旋翼无人机用于捕捉违规无人机将成为可能。
[1] 本刊综合.无人机飞入百姓家[J].发明与创新,2016(1):4-9
[2] 李磊,熊涛,胡湘阳,等.浅论无人机应用领域及前景[J].地理空间信息,2010(5):7-9
[3] 本刊编辑部.无人机“黑飞”引发关注[J].人民公安,2015(22):35
[4] 民用无人驾驶航空器系统驾驶员管理暂行规定[S].
[5] 中华人民共和国飞行基本规则[S].
[6] 民用无人驾驶航空器实名登记管理规定[S].
[7] 杜洋,刘洪辰.自动化无人机快递配送系统研究[J].科技传播,2016(5):96-97
猜你喜欢
中老年保健(2021年3期)2021-08-22
科技资讯(2017年10期)2017-05-26
中国新通信(2016年24期)2017-03-08
兵器知识(2017年2期)2017-02-21
中国新技术新产品(2017年2期)2017-01-20
海军航空大学学报(2015年4期)2015-02-27
天津冶金(2014年4期)2014-02-28
儿童故事画报(2013年3期)2013-06-24
教练机(2011年3期)2011-01-14
科普童话·百科探秘(2009年5期)2009-06-08