
一种优化WSNs节点部署的变步长虚拟力算法*
2018-04-27 01:35张俏薇陈俊杰
传感器与微系统 2018年5期
张俏薇, 陈俊杰
(东南大学 仪器科学与工程学院,江苏 南京 210096)
0 引 言
无线传感器网络[1](wireless sensor networks,WSNs)节点的初始部署通常为随机部署,导致覆盖率较低,产生监测空洞。为解决该问题,需调整节点的部署位置,以降低监测空洞和节点部署冗余。虚拟力[2]算法因其实现简单、应用灵活、优化效果明显等优点,成为目前移动传感器节点部署的主要优化方法之一。
国内外对基于虚拟力算法的覆盖策略进行了许多研究。刘军[3]针对现有虚拟力算法中存在覆盖效率和覆盖率不统一的问题,提出了利用传感器节点感知扇形区域质心点间的斥力调节感知方向,利用虚拟力和覆盖冗余度共同控制传感器的转动。Brust M R等人[4]考虑到保证无人机航拍的三维覆盖率时的定位困难,借鉴分子几何学中电子对围绕中心原子安排自身位置的思想,提出了一种基于虚拟力算法的自动定位3D簇算法。Khoufi I等人[5]针对复杂假设条件下的应用场景,设计了一种躲避障碍的虚拟力算法,可以避免节点震荡的问题,并可以在分配机制下检测到节点部署结果。Li Y等人[6]提出了一种均衡能量的虚拟力算法,引入了一种均匀度函数的评估函数评估WSNs节点部署分布的均匀性,实现了以较少的能耗达到节点部署的高覆盖率和高度均匀性。前述研究并未考虑到虚拟力算法后期稳定性差这一缺陷,而稳定性差会降低覆盖效率,影响实际应用效果,增加部署成本。
最小均方(least mean square,LMS)自适应滤波算法具有计算量小、易于实现且对信号的统计特性具有稳健性等优点而得到广泛应用[7]。本文借鉴LMS自适应滤波函数中基于sigmoid函数的变步长函数,对传统虚拟力算法的步长函数进行了改进。仿真实验表明:改进算法可以在维持传统虚拟力算法优越性的基础上,改善后期稳定性差、稳态误差大的缺点,保证了部署效果的有效性。
1 节点感知模型
本文采用0—1圆盘感知模型。假设WSNs监测区域S为二维平面的矩形,离散化为K个网格,每个网格采用网格点进行描述。每个网格的面积为1,单位化后,使得监测区域定义为一个由许多网格点组成的集合
C={a(x1,y1),a(x2,y2),…,a(xK,yK)}
(1)
式中K为网格点的数目,需要根据监测区域的目标和测量精度要求确定。
为了研究的针对性,本文设定感知半径为一合适常量r。假设每一传感器节点s放置于位置(xs,ys),对于任一点d,位置为(xd,yd),s~d的欧氏距离为l(s,d),d点被s点监测到的概率与传感器节点感知半径r的关系为[8]
(2)
2 基于sigmoid函数的变步长虚拟力算法
在监测区域,将n个移动传感器节点随机分布在L×W的大面积目标区域,记为集合U
U=[u1,u2,…,un]
(3)
在该监测区域建立坐标系,使区域的4顶点坐标分别为(100,100),(L+100,100),(W+100,100),(L+100,W+100),节点ui坐标(xi,yi),i=1,2,3,…,感知半径为rp。在此坐标系下构成的WSNs中,初始节点分布不均匀,覆盖率低。
传统虚拟力算法[9]中,假设传感器节点之间,节点与网络格点之间存在着力的作用,使节点运动。该模型假定[9]:1) 所有节点都是可移动的;2) 所有节点具有全向传感器,且其感知区域是一个以节点为圆心的圆形;3) 所有节点的位置信息是可知的;4) 所计算出的移动方案可以有效执行;5) 所有节点的质量相同。
每个节点ui可能受到3种力的作用:来自边界的斥力FiB;来自网格节点的引力FiD;来自其他节点uj的引力或斥力Fij。Fij大小由两个节点ui与uj之间的距离决定。设置距离阈值为dmax,节点ui所受到的合力Fi为
(4)
(5)
式中dij为节点ui与节点uj之间的欧氏距离;αij为从节点ui到节点uj的方向角;ta和tr分别为引力和斥力的系数,当两个节点之间的距离小于阈值dmax时,受到斥力;大于阈值时,受到引力;等于阈值时,受到的力为0。
根据牛顿力学定律,节点受力后,会产生加速度
(6)
式中ai为传感器节点ui的加速度;mi为传感器节点ui的质量。
传感器节点ui的运动速度为
vi=aiti
(7)
在相同的时间间隔中,节点的运动距离di正比于加速度ai的值
(8)
根据传统虚拟力算法的实现过程可知,理想情况下,如果2个节点之间的距离十分近,会产生非常大的斥力,导致节点移动速度较快。但在实际应用中,每个节点的移动速度有最高速度限制,且速度值vi通常为常数,即
vi=max_step
(9)
传感器节点ui的速度值,即为每次迭代节点的移动步长μi
μi=vi
(10)
可知传统方法易导致迭代效果达到了最佳后,继续迭代,后期稳定性下降。因此,需要对步长选取进行调整。
根据文献[10]的分析,改进的LMS算法的步长函数调整方式如下:在初始收敛阶段,步长应较大,以便有较快的收敛速度和对时变系统的跟踪速度,在算法收敛后,应保持很小的调整步长以达到很小的稳态误差,获得较好的稳定性。步长的变化趋势应随时间或者迭代次数的增加而减少,减小的幅度应越来越大,直至最后趋近于0。
文献[5]根据sigmoid函数提出了改变步长因子μi的设想:μi为e(t)的sigmoid函数
(11)
式中α为控制sigmoid函数的常数,决定曲线上升的速度;β为控制sigmoid函数取值范围的常数;t为迭代次数;e(t)为每次迭代的误差,即每次迭代的覆盖空洞率。μ(t)与e(t)的函数曲线如图1所示。
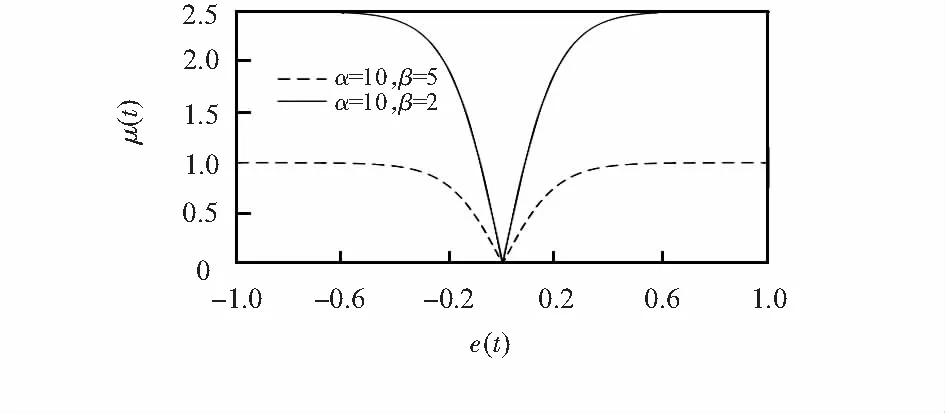
图1 e(t)与μ(t)的关系曲线
可知,随着e(t)减小,μ(t)随之减小,且减小的幅度由小变大。可实现对传统虚拟力算法缺陷的弥补,在收敛达到一定程度后,使最终结果趋于稳定。
3 仿真实验与结果分析
通过仿真实验验证算法对提高传统虚拟力算法后期稳定性的有效性,并对算法性能进行对比分析,包括收敛性能、覆盖率。通过引入基于sigmoid变步长函数对节点的移动速度进行干预,提高了节点后期的覆盖效果的稳定性,同时提高了迭代前期的收敛速度。并与线性函数变步长和二次函数变步长算法进行了对比分析。仿真实验参数设置如表1所示。
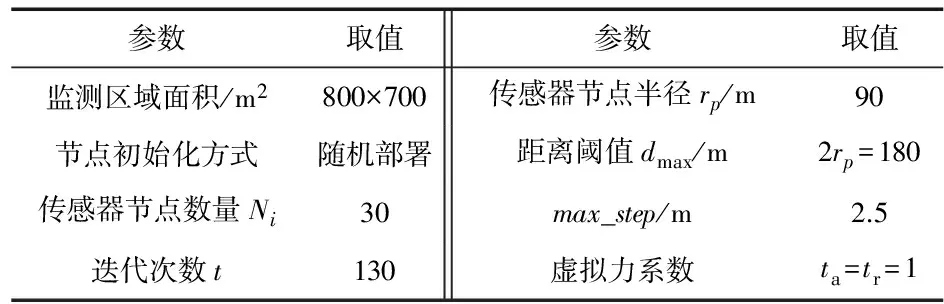
表1 仿真实验参数
根据传感节点感知模型和监测区域的建立,任意一个无线传感器节点均可以部署到任何一个被划分的网格点上,实现监测区域覆盖率量化,用比值q表示评价WSNs节点部署性能优劣的目标函数,即
q=sum/K
(12)
式中sum为被覆盖的网络点数;K为总网络点数。
本文设计了3种变步长的函数进行对比分析,分别为线性函数、二次函数和基于sigmoid函数的变步长函数。
仿真初始阶段,传感器节点随机分布于监测区域。分别在传统的虚拟力算法、线性函数变步长的虚拟力算法、二次函数变步长的虚拟力算法和基于sigmoid函数变步长的虚拟力算法的作用下,分别进行位置更新。
定义线性变步长的虚拟力算法的步长函数为
μL(t)=aLt+bL
(13)
式中aL,bL分别为线性函数的参数。
定义二次函数变步长的虚拟力算法的步长函数为
μQ(t)=aQt2+bQ
(14)
式中aQ,bQ分别为二次函数的参数。
定义sigmoid函数变步长的虚拟力算法的步长函数为
(15)
式中aS,bS分别为基于sigmoid函数变步长函数的参数。
各自选取最优参数,进行仿真实验。
传统虚拟力算法仿真结果如图2所示。线性函数变步长、二次函数变步长和基于sigmoid函数变步长的虚拟力算法仿真结果如图3所示。
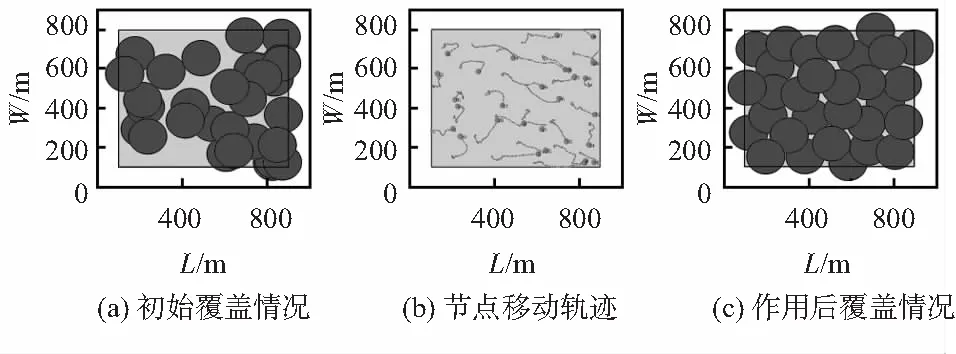
图2 传统虚拟力作用情况
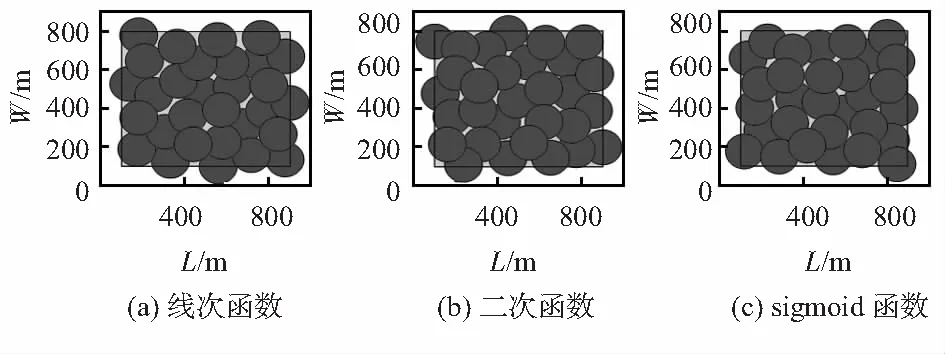
图3 变步长函数覆盖情况
如图4所示,传统虚拟力算法后期的覆盖率数据不稳定。线性变步长的虚拟力算法可以加快收敛速度,用了比较少的迭代次数即达到了最佳覆盖率,效果比传统虚拟力算法好很多。二次函数变步长的虚拟力算法,收敛速度较传统虚拟力算法快,但其不稳定性较传统虚拟力算法更大;可以明显看出:基于sigmoid函数的变步长虚拟力算法的收敛速度最快,迭代效果最佳,后期结果的稳定性提高。4种函数性能指标如表2所示。
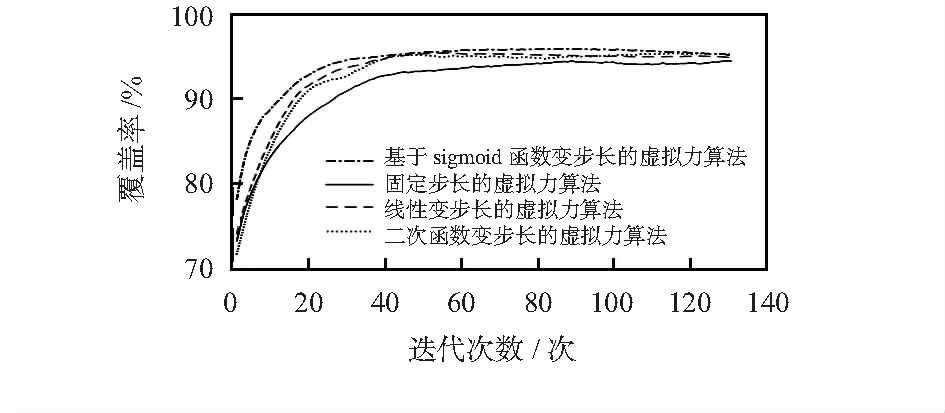
图4 覆盖率变化过程对比

性能指标传统函数线性函数二次函数基于sigmoid函数覆盖率最优值/%94.4595.3695.3595.89迭代次数89.0054.00115.0087.00覆盖率最差值/%92.7994.8394.6995.09均值91.7295.1095.0595.60方差值0.04440.00150.00160.0022
可知:虽然基于sigmoid函数的变步长虚拟力算法达到覆盖率最优时迭代次数不是最少,稳定性与线性函数和二次函数变步长相比略差一点,但其覆盖效果最好。与传统虚拟力算法相比,覆盖率均值提高了4.23 %,覆盖率最优值提高了1.52 %,稳定性提高了95.05 %。基于sigmoid函数的变步长虚拟力算法在保证收敛速度的同时,有效提高了覆盖率,并且极大地提高了后期稳定性。
4 结 论
提出了变步长改进的虚拟力算法。在建立的监测模型基础上,通过借鉴LMS自适应滤波算法中变步长函数,研究了线性函数、二次函数和基于sigmoid函数的变步长虚拟力算法对覆盖效果的改进情况。通过仿真结果比较发现,基于sigmoid函数变步长的改进算法效果最好,与传统虚拟力算法相比,在保证收敛速度的同时,极大地提高了后期阶段的数据稳定性。
参考文献:
[1] 李双明,武庆威.采用RSSI提高无线传感器网络定位精度的算法[J].无线电工程,2015,45(2):8-10.
[2] 毛科技,徐 慧,方 凯,等.基于虚拟力的WSNs路由协议设计与实现[J].传感器与微系统,2017,47(12):98-101.
[3] 刘 军.基于虚拟力算法的 WMSNs覆盖研究[J].传感器与微系统,2016,35(11):74-76.
[5] Khoufi I,Minet P,Laouiti A.OA-DVFA:A distributed virtual forces-based algorithm to monitor an area with unknown obstacle-s[C]∥IEEE Consumer Communications & Networking Confe-rence,IEEE,2016:1036-1041.
[6] Li Y,Zhang B,Chai S.An energy balanced-virtual force algo-rithm for Mobile-WSNs[C]∥IEEE International Conference on Mechatronics and Automation,IEEE,2015:1779-1784.
[7] 覃景繁,欧阳景正.一种新的变步长LMS自应用滤波算法[J].数据采集与处理,1997,12(3):171-174.
[8] Zou Y,Chakrabarty K.Sensor deployment and target localization based on virtual forces[C]∥The Twenty-Second Annual Joint Conference of the IEEE Computer and Communications,INFOCOM 2003,IEEE Societies,IEEE,2003:1293-1303.
[9] 张 涛,余翔宇,蓝俊健,等.改进的无线传感器网络节点虚拟力部署方法[J].计算机应用研究,2015,32(11):3356-3358.
[10] 孟小猛. 自适应滤波算法研究及应用[D].北京:北京邮电大学,2010.
猜你喜欢
今日农业(2022年15期)2022-09-20
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
今日农业(2021年21期)2021-11-26
今日农业(2021年7期)2021-07-28
非公有制企业党建(2020年5期)2020-06-16
太空探索(2016年9期)2016-07-12
西南交通大学学报(2016年6期)2016-05-04
林业与生态(2016年2期)2016-02-27
北京航空航天大学学报(2016年12期)2016-02-27
