
水声信号监测系统设计与实现∗
2018-04-27 03:34郭燕子丁翠环李国良
舰船电子工程 2018年4期
郭燕子 丁翠环 李国良
(91388部队46分队 湛江 524022)
1 引言
在水声设备的试验中,参试设备的多样化决定了一次试验的成功不仅仅取决于被测设备的性能,在很大程度上还取决于参试设备试验期间能否够正常工作。由于水声设备大多处于水面或水下运动状态,测量手段一般通过声信号实现,所以,对水声信号的监测有助于判断被测武备、参试设备的工作状态。以往试验中由于海洋环境的复杂,设备自身的性能诸如方向性、应答门限、关门时间等的限制,导致记录的数据不能完全反映设备的工作情况,需要研制能够对试验中所有水声信号进行实时监测、记录的监测设备,将被试和参试设备所发出的信号包括这些信号的混响信号毫无遗漏地记录下来,并能够随时回放,避免试验结果的评定出现争议。水声信号监测系统用于对水声信号的监测与观察,将被试和参试设备用声信号联系起来,判断它们是否正常的发射出声信号,从而对试验中各参试设备工作状态作出判定,为试验中的异常情况提供分析结果,避免评定结果存在争议。
2 系统主要功能及应用
水声信号监测系统应用虚拟仪器技术实时监测和录取目标信号和应答信号及海洋环境噪声;实时显示监测到的波形,信号的频率,到达水听器时信号的能量,记录信号到达的时刻,事后进行波形回放,各种谱分析,测量时间间隔,信号频率和大小,最终形成结果报告。
该系统的应用在于,在鱼雷试验中,用来监测鱼雷、声靶的信号发射情况,确定鱼雷、声靶的工作状态;在声纳试验中,可以用来检查声信号的频率、功率、脉冲宽度、发射周期等是否符合要求;尤其在水声对抗试验中,可用来监测水面舰艇、潜艇的自噪声及主动声纳、噪声干扰器发出的各种信号,并及时提供有效、准确的数据结果。
3 系统组成及工作原理
3.1 系统组成
水声信号监测系统由水听器、电缆及绞盘、信号处理器、存储设备、采集卡和计算机组成。系统组成及原理框图如图1所示。

图1 水声信号监测系统组成框图
水听器包括声传感器和信号前置放大器,完成将水中声信号转变为电信号,并放大,信号通过电缆传送到信号处理器。信号处理器包括电源、分档衰减器、低噪放大器、高阶带通滤波器等。信号处理器主要用来将信号限定在需要的频带之内,对信号进行适当的放大。分档衰减器对强弱不同的信号分别予以不同程度的衰减,保证信号经过后面的放大电路后不至于引起失真。信号处理器组成框图如图2所示。计算机通过采集卡完成对信号的采集、实时显示及事后频率处理、回放。

图2 信号处理器框图
3.2 系统工作原理
试验时,水听器入水深度视具体试验而定,一般比参试设备略深。为便于下放和回收水听器,电缆与护绳共同缠绕于绞架之上,并通过绞架与计算机相连,将收集到的信号传送至计算机进行处理。
系统工作时,水听器声信号转变为电信号,并放大,信号通过电缆传送到信号处理器,信号处理器完成信号的放大、衰减、滤波等,将信号限定在需要的频带之内,对信号进行适当的放大,计算机通过采集卡完成对信号的采集、实时显示及事后频率处理、回放。
4 关键技术
4.1 虚拟仪器技术
虚拟仪器技术用软件来取代部分硬件功能,即用软件来实现数据的存取、处理、显示,这样可以简化硬件模块,从而缩小整个系统体积,提高系统便携性和可靠性,并且具有更强的灵活性和扩展性。因而在自动化测试和测量领域得到广泛应用,同时该技术在对采集数据的永久性存储上具有硬件设备无法比拟的优越性[1]。本系统中虚拟仪器主要完成以下功能:
1)对采集卡部分参数的设定。
2)对采集信号波形的实时显示,并实时提供一个采样长度内信号的最大值。
3)对采集信号的功率谱分析、相位谱分析、对数谱分析、自相关分析。
4)对采集信号的事后回放。
5)对采集信号波形、谱分析结果的打印。
4.2 游标测量技术
传统软件测量中,对于时间和频率的测量存在很大的不足,一方面,计算机对一个采样周期内的信号进行分析,经过某些算法给出信号的特征参数,但由于信号在海洋传播过程中会有很大的变形、失真,且这些变化随机性较大,所以完全由计算机处理从算法上较难实现,即便实现也会有很大的测量误差。另一方面,测量信息的显示比较被动,计算机分析后的信息只能以某种列表的形式显示出来,对于真正需要的信息有可能没有显示,测量内容过于单一,不能满足试验的需要。
游标卡尺是以主尺的数据加游标辅尺的数据作为测量结果。在基于游标原理的测量方法中,将计算机采样和人为采样结合对信号特征进行分析,即操作员能够随时随地对任意信号进行脉宽、强度、频谱分析,提取信号特征。由于计算机在采样时对采集信号的幅度和出现时间记录的精确度较高,而采集信号的形状、幅度均有随机性变化,特别是有混响信号的存在,使得计算机对于信号的幅度、脉宽的判断显得十分困难,但在人机对话方式下,由人以游标方式给出具体的两个采样点,再由计算机计算两采样点之间的幅度、时间差,在信号的谱分析结果中,对于信号在某一频率分量上的幅度也可以采用这种人机交互的测量方法。这样,就可以利用人的模糊判断性,实现计算机对信号参数的精确测量[2~3]。
4.3 声信号检测分离技术
在传统的信号检测中,对已知信号的检测一般采用同步检测方式:包括门限检测、脉宽检测、频率检测。这种检测方式虽然实用、有效,但需要大量的硬件支持且电路复杂。
本系统在设计过程中遵照系统体积小、设备轻的原则采用计算机软件检测。为提高检测效率,避免大量复杂的数学运算尽量不采用频域处理。但实际试验中,信号幅值变化相当大,信号形状也不规则,且由于混响的存在,正常的信号基本上被混响信号连在一起,很难分开,使得计算机对信号的统计相当困难,基于此,根据研究各种信号从时间顺序、幅度大小、信号脉冲宽度等特点,提出了以下软件设计的解决方案[4~5]:
1)提取采集信号的包络,并将其平滑。
2)利用混响相干包络频率是发射及应答频率差的特点,对信号进行相干判断,相干判断的重要依据是相邻两个波峰或波谷之间的时间差,根据这个时间差即可判断是否有相干波出现,若有相干波形出现,则可以判断发射、应答信号均正常。
3)在相干波判断法比较困难(混响信号对正常信号的影响较小)的情况下,则应采用幅度—脉宽判定法。对于幅度超过一定门限的信号,再对其脉宽进行评估。
5 系统软件实现
软件采用Visual C++、LabVIEW等编程工具,实现部分功能参数的设定;对采集信号波形的实时显示;对采集信号的功率谱、相位谱、对数谱、自相关分析;事后回放;波形、谱分析结果的打印。
5.1 设定采集卡参数
主要包括采样频率、信号通道、采样长度参数的确定。
5.1.1 设定采集频率
在采集卡中,为能够适应不同试验场合的需要,对采样频率的设定采用对可编程器件编程的方
式。程序中首先向控制字寄存器地址写入方式控制字,使通道0工作于方式3,产生相应的方波信号,作为A/D转换的时钟信号。然后以计数器通道地址写入计数器初值至CR。程序在默认方式将采样频率预置为80KHz。其程序流程如图3。
5.1.2 设定采集通道
本系统可工作于单通道、双通道采集两种采集方式,程序通过控制多通道开关来选择采集方式。单通道采集方式程序流程如图4所示,通过写多通道开关的控制字来达到选择采集通道的目的。
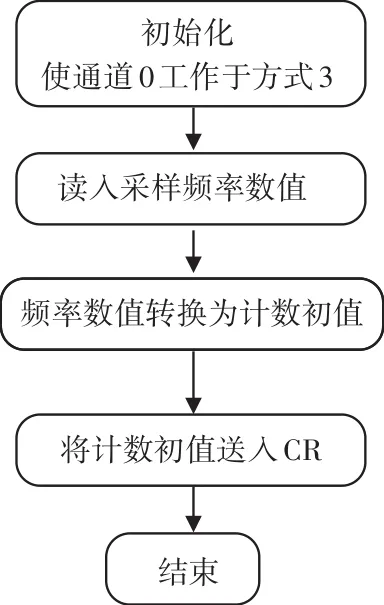
图3 设定采集频率程序流程
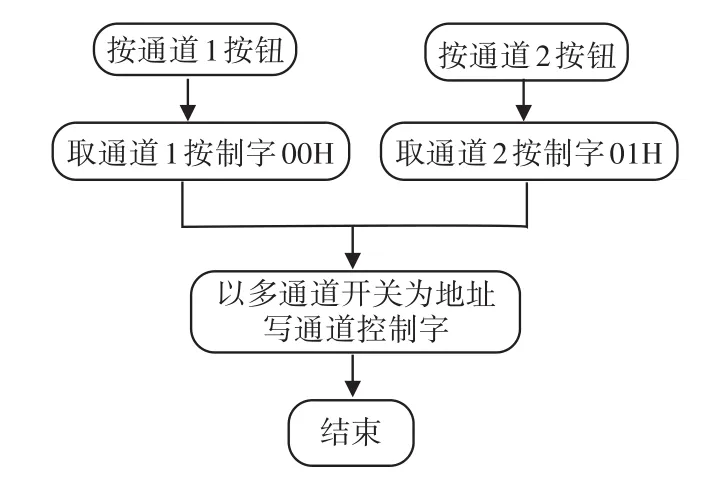
图4 设定采集通道单通道模式流程图
本系统在双通道采集时,采用在两个通道之间轮流采集的处理方式,程序流程图如图5,当打开一个通道后,采集该通道A/D转换后的数据,放入内存,并将该数据经过计算显示在计算机屏幕上,待该通道数据处理完毕后转入下一个通道的处理,如此循环,直到操作员结束采集。
5.1.3 设定采集长度
本系统的采集长度分为4K、8K、16K三种,程序根据三种不同的采样长度在内存中开辟出不同的数据存放空间,存放形式采用数组存放。
5.2 采集信号波形显示
A/D转换后的信号数据必须分两次读出,先读低8位,再读高4位,然后将低8位、高4位组合成实际所需要的数据,根据数据的大小求出该数据在屏幕上显示的位置,进行波形显示。
5.3 事后回放
事后回放有助于对信号的进一步观测、分析和处理。本系统回放方式分为自动和手动两种。自动方式下对整个试验过程进行总体观测,做出一个整体评估,手动方式实现对采集信号的向前和向后浏览,它有助于对某些特殊信号的进一步观测与分析。程序流程如图6。
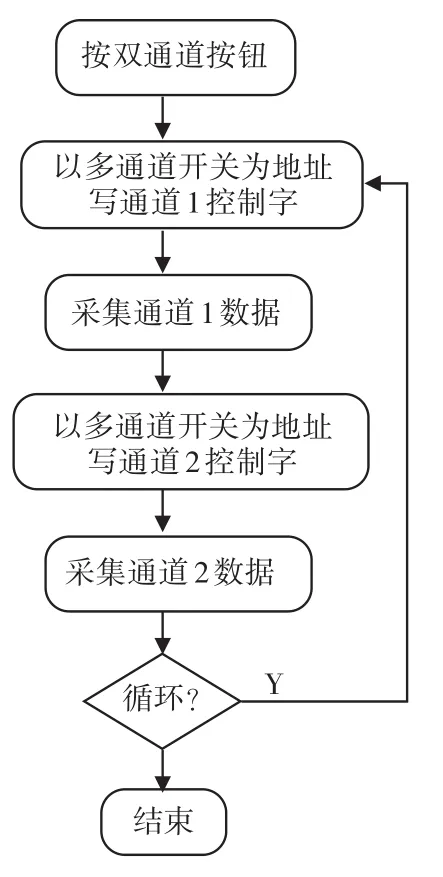
图5 设定采集通道双通道模式流程图
6 系统说明
水声信号监测系统主界面如图7,主要用于选择采集通道、参数设定(包括采样率、采样长度)、数据采集、波形实时显示及事后打印、回放控制,并提供一个采样长度中信号的最大值。

图6 事后回放程序流程图

图7 水声信号监测系统主界面
频谱分析界面如图8所示,此界面主要用来进行频谱分析,包括功率谱分析、对数谱分析、相位谱分析、自相关分析、失真度分析等五个分析项目,其分析结果包括打印、分析结果显示、波形显示、原始数据查看、分析结果存盘等功能。
7 结语
本系统可广泛用于各种水下水声设备的试验中,监测各参试水下设备的声信号的频率、功率、脉宽、发射周期等,及时提供数据结果,实时掌握各目标工作情况,确定其工作状态是否符合要求。使试验评估小组能够准确掌握试验情况,使试验有章可循,减少了参试各方因无评判依据而产生的纠纷,从而缩短试验周期,节约试验经费,提高试验效率。
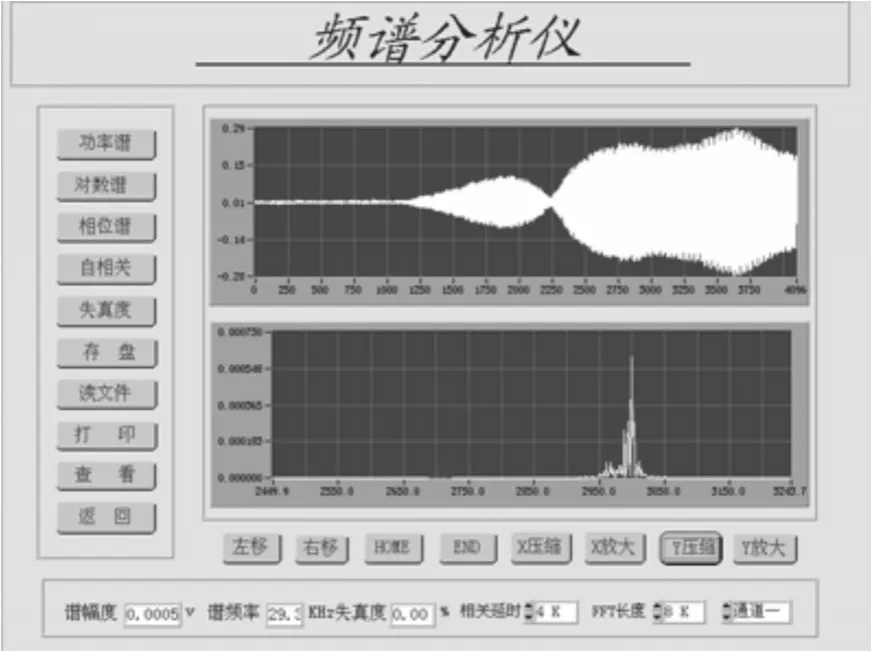
图8 水声信号监测系统频谱分析界面
[1]赵鹏飞.虚拟仪器技术及其应用和发展[J].鱼雷与发射技术,2011(2):55-59.
[2]田景文.单片机控制的游标型智能放大器[J].电子测量与仪器学报,2000,14(1):61-65.
[3]凃巧玲,徐霞.一种基于游标原理的大量程高精度测量方法[J].压电与声光,2009,31(1):115-118.
[4]吴胜举,张明铎.声学测量原理与方法[M].北京.科学出版社,2014:24-38.
[5]钟清华,李志为,梁涛等.高精度温差测量系统的实现[J].计量技术,2004(3):10-12.
[6]杨有东.汪琛沉.Visual C++程序设计全程指南[M].北京:电子工业出版社,2009:237-263.
[7]王华,叶爱亮,祁立学等.Visual C++6.0编程实例与技巧[M].北京:机械工业出版社,1999:362-390.
[8]张桐,陈国顺,王正林.精通LabVIEW程序设计[M].北京:电子工业出版社,2008:62-184.
[9]李扬,李晓明.基于LabVIEW数据采集的实现[J].微计算机应用,2003,24(1):38-41.
[10]胡广书.数字信号处理:理论、算法与实现[M].北京:清华大学出版社,2002.
[11]黄顺吉.数字信号处理及其应用[M].北京:国防工业出版社,1982:257-389.
[12]王选民.智能仪器原理及设计[M].北京:清华大学出版社,2007:96-157.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
电子技术与软件工程(2022年6期)2022-07-07
雷达学报(2022年2期)2022-04-30
中草药(2022年8期)2022-04-19
数字海洋与水下攻防(2020年5期)2021-01-04
汽车与驾驶维修(维修版)(2020年2期)2020-03-20
福建文学(2019年12期)2019-08-06
汽车维护与修理(2018年9期)2018-10-31
扬子江(2016年1期)2016-05-19
电脑知识与技术(2016年8期)2016-05-19
