
水下航行器动力系统装配质量量化评估及优化∗
2018-04-27 03:33许则富
舰船电子工程 2018年4期
许则富
(中国船舶重工集团公司七五○试验场 昆明 650051)
1 引言
水下航行器是一种航行于水下的航行体,主要包括鱼雷、水下无人探测器、蛙人运载器等,它能够完成水下勘探、侦测以及对敌攻击等任务。以鱼雷为例,该类水下航行器通过舰艇、潜艇、飞机上发射,在水中能够自动航行、自主导航控制和目标攻击的水下航行装置,水下航行器在水中航行的动力装置主要分为热动力装置和电动力装置两大类,通过燃料或者电池为发动机提供动力输出,实现水下自主航行[2]。因此,水下航行器的动力系统是保障航行器的续航能力和生存周期的关键,在水下航行器的动力系统装配中,对其质量优化控制和量化评估,能根本上保证水下航行器动力系统的质量优化,从而提高鱼雷、无人潜航器等水下航行器的发动机质量水平,研究相关的动力系统装配质量量化评估和优化方法受到人们的极大关注[2]。
对水下航行器动力系统装配质量量化评估方法研究是建立在对动力系统的质量量化评估约束指标参量构建基础上的,采用质量最优为控制目标函数,结合成本和效益等参数指标进行优化求解,从而提高装配质量[3],根据上述原理,相关文献进行了装配质量优化方法研究,并取得了一定的研究成果,其中,文献[4]中提出一种基于均衡博弈控制的电机装配质量量化评估方法,把影响电机装配质量的机械费、材料费等不定因素纳入考虑范围,以电机输出功率最优和效率最高为约束目标泛函,采用博弈均衡算法进行全局寻优,改善了装配质量的优化过程控制,但该方法计算开销过大,且装配质量的输入参量存在非线性特征时,容易陷入具有优化解;文献[5]中提出一种基于主成分分析的动力系统装配质量量化评估方法,优化参数选取发动机系统的定子轭厚和永磁体厚度,结合主成分分析方法进行装配质量的最优控制参数求解,提高装配质量的量化评估准确性,该方法存在计算开销过程,不能有效解决装配质量控制的非线性等问题。
针对上述问题,本文提出一种基于粒子群进化寻优的装配质量量化评估及优化方法。首先构建水下航行器发动机动力系统装配质量优化的约束指标模型,采用支持向量机模型进行动力系统装配质量的自适应量化特征分解,然后进行装配质量控制目标函数的粒子群优化求解,最后进行仿真实验分析,展示了本文方法在提高水下航行器动力系统装配质量方面的优越性能。
2 水下航行器动力系统装配结构组成及约束参量分析
2.1 水下航行器动力系统装配结构组成
为了实现水下航行器动力系统装配质量量化评估及优化求解,需要首先分析水下航行器动力系统的结构构成并进行相关参量的解算,建立几何参数和目标函数的表达式,首先分析水下航行器动力系统的材料属性,材料采用永磁体构成,材料成本的主要约束参量为槽满率kf,永磁体剩余磁密Br以及定/转子铁芯的磁密等,根据发动机的输出功率P、电磁转矩等Tem和额定旋转角速度ωr,令发动机的额定绕组为l=ls,定/转子轴向长度r=rr+lg,以及电磁损耗NI=AwJcukf,B的磁场中通过电流为I时,导体所受的力为:f=Il×B。在旋转运动中,N个与磁场垂直的导体中,在距离旋转中心距离为r处的转矩为T=NILBr。依据洛伦兹法则,定义水下航行器动力系统的剩余磁密:Aw=πlw(2rr+2lg+lw)。可见,在水下航行器的动力系统装配参量优化中,主要的优化参数包括:极对数P,粗糙系数β,磁极厚度lm,为了降低发动机装配过程中不确定开销,在对发动机限定最大转速的条件下,发动机的动力传动输出增益为
其中kc是由发动机的耦合电磁场决定的修正系数,表示发动机实际运行的线圈与总线圈之比(比如kc=2/3),根据非线性反馈控制方法,得到发动机的定/转子铁芯的厚度为

其中Fm为每极磁动势,Ag为永磁体的面积,ℜ为绕组,考虑到漏磁系数的作用,可以估算水下航行器动力系统的电机材料成本、绕组、定/转子铁芯的厚度分别为
其中真空磁导率μ0=4π×10-7H/m,μr1和μr2为水下航行器发动机永磁体和磁导率。假设μr1和μr2为1,则得到单位磁场下瞬间跨度:
最后,考虑到发动机在装配过程中的漏磁系数k1和实际跨距系数kβ,得到在优化装配控制下的输出转矩可以表示为


其中α为铁芯最大磁密,近似为

其中ks<1,δ为经验值。根据上述水下航行器动力系统装配结构组成分析,对影响发动机装配质量的参数进行优化求解[6],为进行装配质量的量化评估提供准确的数据输入基础。
2.2 装配质量量化评估约束参量求解
根据上述分析的水下航行器动力系统的结构组成和装配参数分析,对电磁力、功率损耗和效率等相关参数解算。水下航行器的动力装置输出产生 的 电 压E=vl×B。 令v=rωr,r=rr+lg,B=kβk1Bg,l=lskfkcAw/Ac,考虑到磁损耗,则动力装置的功率损失为

其中ωr为磁密的惯性传导系数,Ac为电磁转矩。航行器的动力系统的输出电流可以表示为I=AcJcu,装配控制端电压为:V=E+RI,其中R为转子的材料损耗,因此:
其中ρ为导线电阻率,ket=1+πγ(rr+lg+lw)/(pls),表示转子铁芯相对静止状态下的磁密修正系数,γ为线圈装配的跨度系数,1代表整距绕组。在对发动机整机装配过程中,输入功率P=VI与Ac无关,由此可以估算功率损耗,在线性约束指标参量体系下,通过主成分分析,得到发动机装配的消耗时间常数,考虑影响发动机输出效率的绕组的自感为
在自感中计入互感,为了使得发动机的功率增益提高,将自感放大4/3倍,此时电机的输出转矩为

因此Ac可以在电压和电流之间折中选取,动力装置的定子铁芯最大磁密为
3 装配质量的量化评估实现及优化
3.1 支持向量机建模
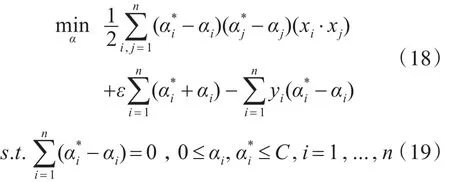
在上述分析水下航行器动力系统的结构组成,并对电磁力、功率损耗和效率等相关参数解算的基础上,进行水下航行器动力系统装配质量量化评估优化设计,本文提出一种基于粒子群进化寻优的装配质量量化评估及优化方法,采用支持向量机模型进行动力系统装配质量指标参数自适应量化特征分解,支持向量机模型采用发动机装配质量最优为控制目标函数进行样本训练,具有泛化能力强、求解速度快的优点[8],假设水下航行器动力系统装配质量训练集T={(xi,yi)},i=1,2,...,n,根据SVR原理[9],得到装配质量的优化控制回归函数为y=f(x)=aT·x+b,其中xi∈Rd是输入的体积/重量、坚固程度指标向量,通过f(x)来推断任一输入x对应的y的值,引入松弛变量ξi和ξi*,惩罚参数C,得到水下航行器动力系统装配质量控制的支持向量机回归控制模型:
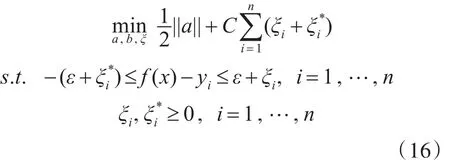
其中C>0,根据支持向量机模型进行动力系统装配质量指标参数自适应量化特征分解[10],得到装配质量量化控制目标函数表示为

其中wp,wv,wc为权重系数,P1=Pcu+Ph+Pe+Pb+Pw为发动机的材料成本、机械损耗与功率损耗之和,Vt为发动机的体积。
3.2 粒子群优化算法
采用模糊聚类算法进行装配质量约束指标系数的属性分类处理,得到装配质量约束指标的聚类输出为

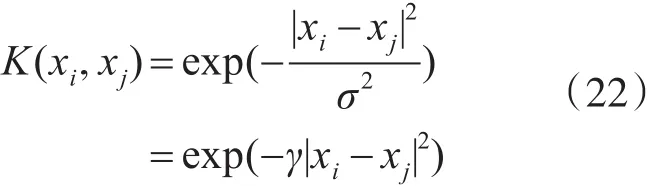
考虑到粒子在当前最优解Pg的径向基核函数(RBF核),通过粒子位置、粒子速度的优化解,得到动力系统装配质量控制的适应度值可表示为

设定粒子的学习因子,将发动机的装配质量等级的划分每个粒子有k维,即为{α1,α2,…,αk},比较各粒子的适应度值,更新其最优的个体最优值Pi和全局最优值Pg,通过上述处理,自适应更新粒子的速度和位置,避免量化评估的最优解陷入局部最优,提高了整个水下航行器动力系统装配质量评估和全局稳定性[12]。算法的实现过程如图1所示。
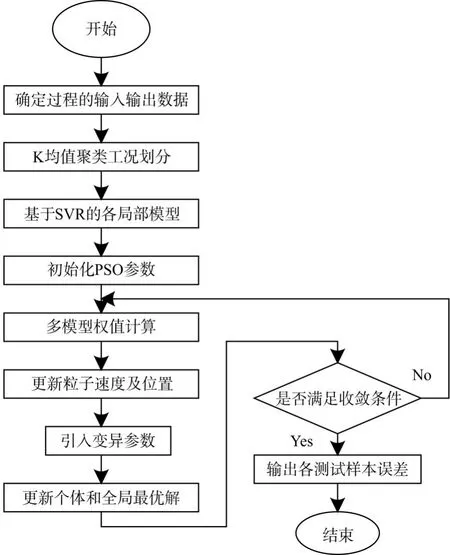
图1 水下航行器动力系统装配质量量化评估粒子群算法实现过程
4 仿真实验与性能分析
为了测试本文方法在实现水下航行器动力系统装配质量量化评估及优化中的应用性能,进行仿真实验,实验采用Matlab 7软件仿真设计,设定水下航行器动力系统的输出转矩为20N.m,功率总损耗为1200W,发动机的转动惯量0.0025Kg·m2,额定转速3000r/min,发电机的阻尼系数0.025 N·m·s/rad,发动机装配质量控制的相关参数为:Q=200,c1=30,c2=10,cr=2,μ1=μ2=0.01,ρ1=ρ2=0.01,δ=0.8。根据上述仿真环境和参量设定,进行装配质量的量化评估仿真,得到水下航行器动力系统装配质量量化指标的功率输出和效率输出如图2所示。

图2 动力系统的输出功率和效率分析
分析图2得知,采用本文方法进行水下航行器动力系统的装配质量量化评估,有效提高了发动机的输出功率和效率,输出稳定性较好,在此基础上,测试各个装配生产组别的质量水平和效率水平,得到结果见表1,分析表1结果得知,本文方法进行装配质量优化处理后,各个生产组别的装配质量水平和效率水平有显著性提高。
为了对比不同方法的性能,采用本文方法和传统的PID方法进行装配质量量化评估,得到预测误差收敛性曲线如图3所示,分析得知,本文方法的全局收敛性较好,实现状态过程质量优化预测,改善了系统装配质量。
5 结语
水下航行器的动力系统是保障航行器的续航能力和生存周期的关键,在水下航行器的动力系统装配中,对其质量优化控制和量化评估,能根本上保证水下航行器动力系统的质量优化,从而提高鱼雷、无人潜航器等水下航行器的发动机质量水平,本文提出一种基于粒子群进化寻优的装配质量量化评估及优化方法。构建水下航行器发动机动力系统装配质量优化的约束指标模型,采用支持向量机模型进行动力系统装配质量的自适应量化特征分解,进行装配质量控制目标函数的粒子群优化求解。研究表明,本文方法能有效提升水下航行器动力系统装配质量,在发动机装配中具有很好的应用价值。
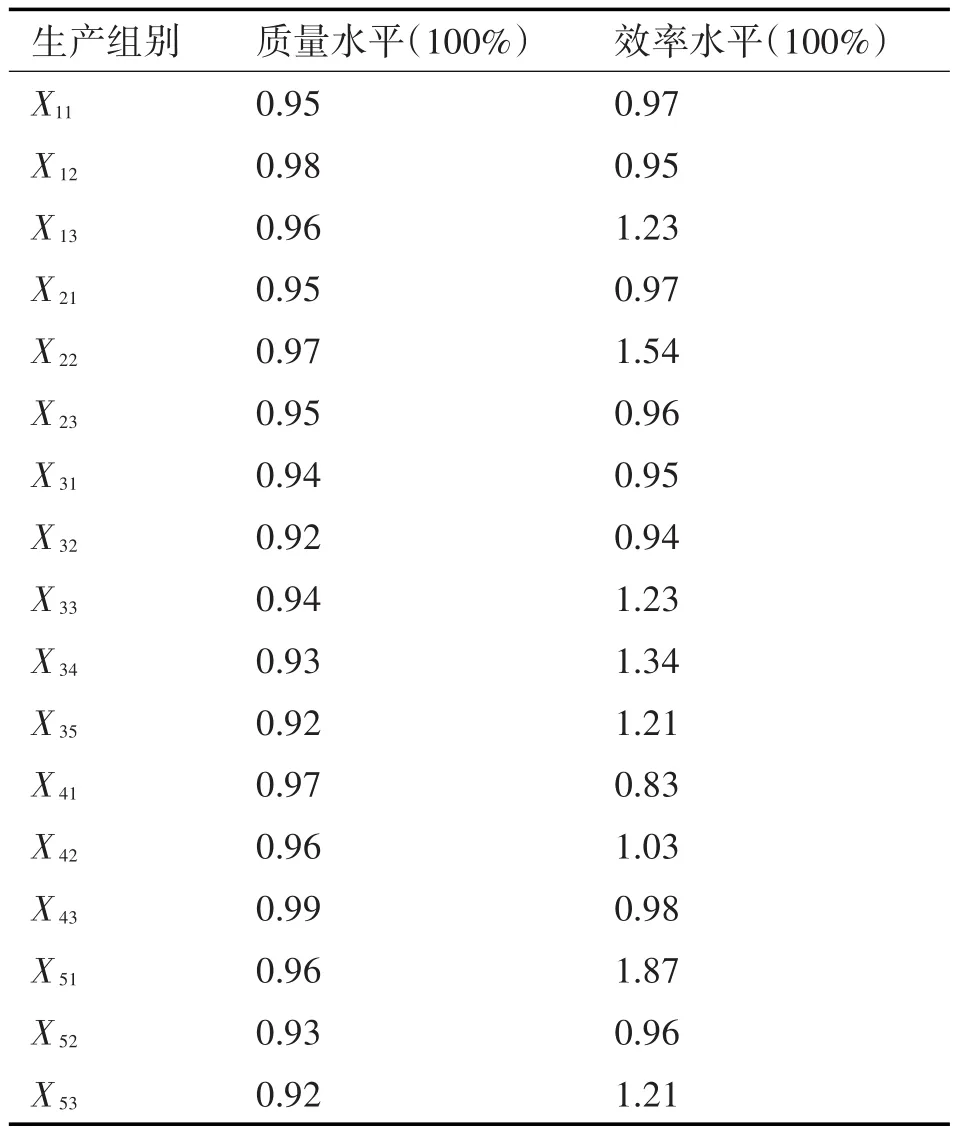
表1 各个生产组别的装配质量评估水平
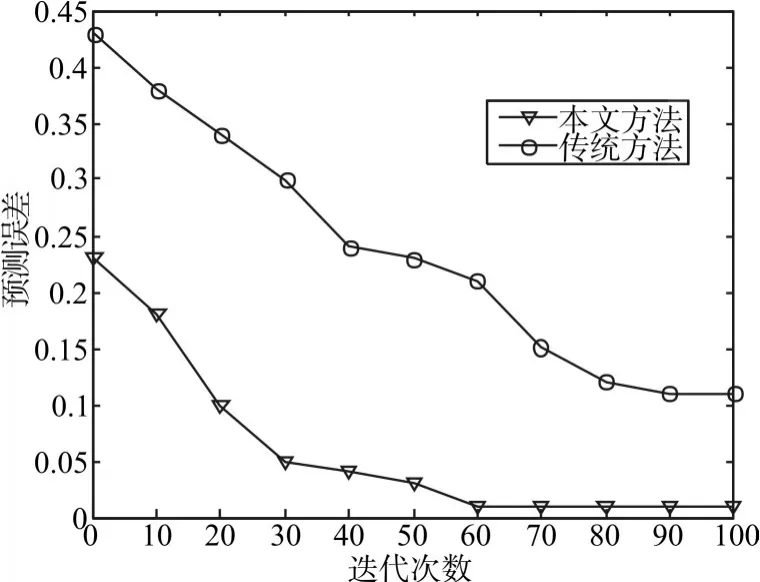
图3 装配质量评估预测误差收敛性曲线
[1]周勇,甘新年,胡光波,等.鱼雷制导控制系统多通道控制加权算法设计[J].现代电子技术,2014,37(19):14-17.
[2]陆兴华,陈锐俊,池坤丹.引入人体红外释热探测的救援机器人感知系统[J]. 舰船电子工程,2016,36(3):151-155.
[3]葛立志.基于全弹道控制分析的水下航行器攻击模型视景仿真[J].舰船电子工程,2015,35(3):137-141.
[4]Mernik M,Liu S H,Karaboga M D,et al.On clarifying misconceptions when comparing variants of the Artificial Bee Colony Algorithm by offering a new implementation[J].Information Sciences,2015,291(10):115-127.
[5]Hsieh T J.A bacterial gene recombination algorithm for solving constrained optimization problems[J].Applied Mathematicsand Computation, 2014, 231 (15) :187-204.
[6]张涛,唐振民,吕建勇.一种基于低秩表示的子空间聚类改进算法[J]. 电子与信息学报,2016,38(11):2811-2818.
[7]Valente A.Reconfigurable industrial robots:A stochastic programming approach for designing and assembling robot⁃ic arms[J].Robotics and Computer-Integrated Manufac⁃turing,2016,41:115-126.
[8]Singh H P,Sukavanam N.Stability analysis of robust adaptive hybrid position/force controller for robot manipu⁃lators using neural network with uncertainties[J].Neural Computing&Applications,2013,22(7-8):1745-1755.
[9]夏红伟,翟彦斌,马广程,等.基于混沌粒子群优化算法的空间机械臂轨迹规划算法[J].中国惯性技术学报,2014,22(2):211-216.
[10]刘建娟.水下航行器组合导航蔽障控制器的设计与实现[J].舰船科学技术,2017,39(2A):64-66.
[11]GOVONI M A,LI H,KOSINSKI J A.Range-Doppler resolution of the linear-FM noise radar waveform[J].IEEE Transactions on Aerospace and Electronic Sys⁃tems,2013,49(1):658-664.
[12]马雪.基于FPGA嵌入式设计的水声信号采集系统[J].舰船电子工程,2017,37(3):135-139.
猜你喜欢
昆明医科大学学报(2022年1期)2022-02-28
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
娃娃乐园·3-7岁综合智能(2017年9期)2018-02-01
娃娃乐园·3-7岁综合智能(2017年8期)2018-02-01
娃娃乐园·3-7岁综合智能(2017年7期)2018-02-01
分析化学(2018年12期)2018-01-22
创新作文(1-2年级)(2017年7期)2017-12-26
飞碟探索(2015年8期)2015-10-15
