交-交变频器自适应控制系统的设计及仿真
2018-04-26 08:34鲁西坤巩银苗杜庆楠
无线互联科技 2018年7期
鲁西坤,巩银苗,杜庆楠
(1.安阳工学院 电子信息与电气工程学院,河南 安阳 455000;2.河南理工大学 电气工程与自动化学院,河南 焦作 454000)
1 变频器概述
变频调速技术结合电机控制理论,根据调速系统的高性能要求,对电能进行控制。变频调速系统可以分为功率变换和信息处理两部分。电机的先进控制技术的演化、新型功率元器件拓扑结构的发展以及智能控制技术的引入,在很大程度上推动了变频调速技术的飞速发展[1-3],同时也决定了变频调速技术会向着基于先进控制理论的高水平控制策略,主电路拓扑结构向多元化、系统高速处理的数字化、绿色变频等方向发展。近几年,随着自适应调速理论的发展和完善,该控制方式在交-交变频方向的应用也逐渐展开。
自适应控制是指系统能够根据设定的参数的变化,作出最佳的调整策略,来提高系统的控制精度,降低系统的反应时间,从而达到对系统的最佳控制。比例积分微分(Proportion Integration Differentiation,PID)算法是自适应控制中一种比较好的控制算法,但是由于普通的PID控制算法的参数是一组固定的数值,虽然能够实现对变量的控制,但是在控制精度和灵敏度上,不能很好地适应系统的变化[4-5]。为了实现对系统的自适应控制,本文在交-交变频调速系统内,引入了专家PID控制算法,建立了专家知识库,并建立了基于矩阵实验室(Matrix Laboratory,Matlab)的仿真模型,利用专家控制策略,实行在线自动修正PID参数以及改变控制策略,使系统适应在不同工作状态下的特性,从而实现交-交变频的自适应控制。
2 专家PID控制算法
2.1 专家PID的构成及具体实现
专家控制系统是基于知识或经验的控制系统,主要处理定性的、启发或不确定的问题,根据专家知识库,通过逻辑推理最终实现对系统的控制。专家PID结构原理如图1所示,专家控制部分主要包括:专家知识库和逻辑推理,原理图中的各个模块都是由交-交变频器的主控芯片来完成的,CPU根据转差频率、电网当前电压、系统当前状态来调整具体的PID参数,并按照PID参数进行运算,计算出下一时刻系统应该的输出频率和电压值,从而达到调速效果,其具体实现的程序流程如图2所示。
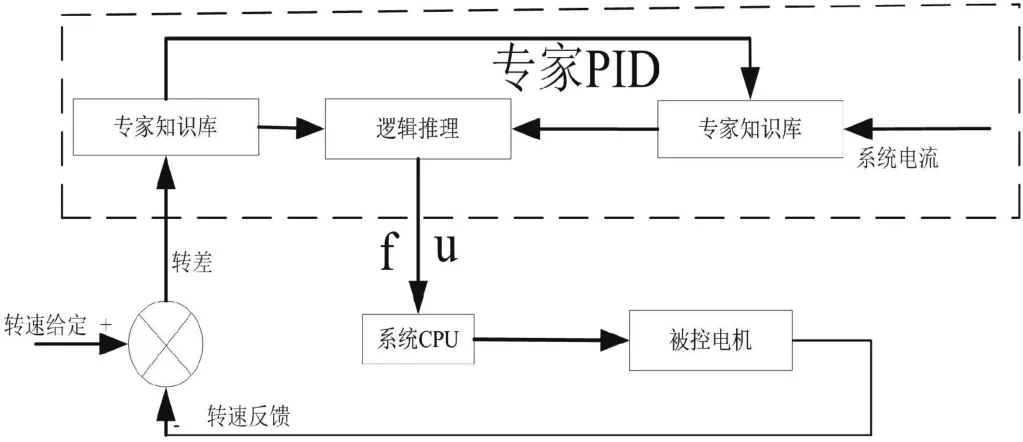
图1 专家PID控制原理
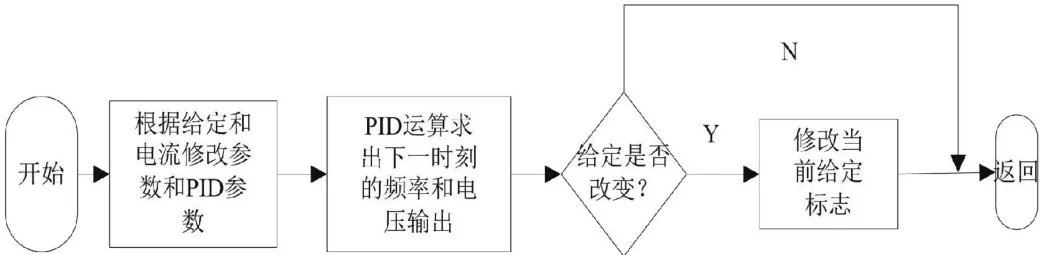
图2 专家PID程序流程
2.2 专家知识库的建立
专家控制性能的好坏取决于知识库的完整性和正确性,知识库的获取有多种途径[6],一是可以从控制领域专家那里获取调试规则,另外一种方法是通过系统仿真的方法间接获取[7-9]。具体内容如下。
(1)想要使系统的调速效果满足系统在不同分频不同负载情况下,不同的性能要求,所设置的PID控制器的比例、积分以及微分系数就应该选择不同的参数值。在各个分频下均选取一组能够使系统运行良好的PID参数,如表1所示。
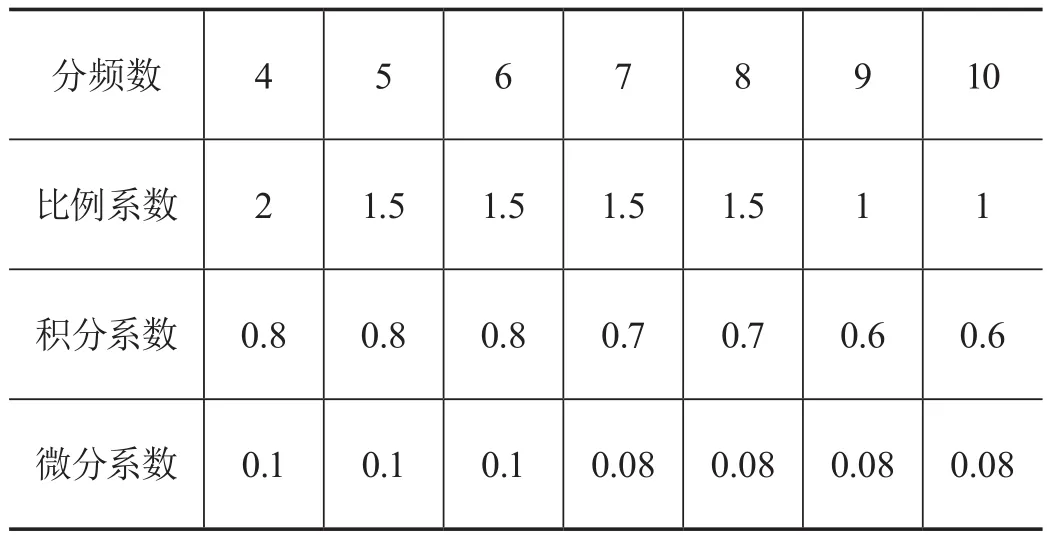
表1 不同分频下的PID参数
(2)为了在调速的过程中,方便系统对输出电压的灵活控制,满足调速系统要求,特将不同速度给定的情况按区域划分,去调节系统的输出,具体的划分情况如表2所示。
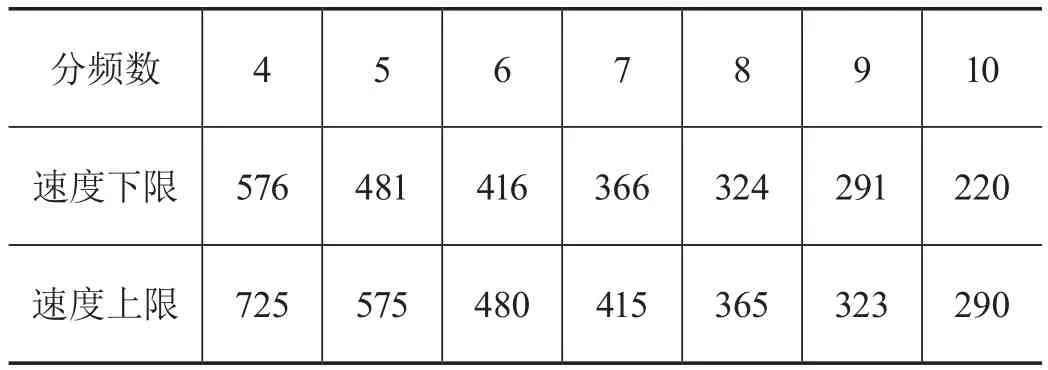
表2 给定速度的区域划分
2.3 专家PID控制规则
专家PID控制算法最主要的一点就是系统能够根据建立的专家知识库[10],结合系统运行的具体状态,去判断选择合适的PID参数,调整PID对变量的限幅值以及改变PID控制器的结构,从而达到调速的目的。其中专家PID的控制规则如下。
(1)PID的上、下限幅值的调整规则。在对系统进行编程设定时,根据具体的参数情况,可以将系统的不同运行状态进行区域划分,并在不同的区域分别设定控制量的上限值和下限值。系统运行时,可以根据电机的运行状态,判断当前处于哪一个区域,系统根据对控制量的调节运算,决定具体的下一时刻的控制量的输出。当PID运算的控制量的输出值大于设定的上限值时,系统将强制把设定的上限值赋值给控制量,而当PID运算的控制量的应该输出的值小于该区域设定的下限值时,系统会强制将控制变量的输出幅值限定为下限值。
(2)KP,KI,KD的调整规则。PID控制器的主要参数变量为KP,KI和KD,根据列入的专家知识库,在系统运行时会根据具体的区域,选择专家知识库中的对应的PID参数,以满足系统对调节性能的需求。
(3)PID控制规则。通过改变PID控制器的各项参数,可以实现改变交-交变频调速系统的性能。增加控制器的比例系数可以减少系统的响应时间,减小系统稳态误差;减小控制器的微分系数可以减小系统的超调量[49];增大控制器的积分系数同样可以减小系统超调量,加快响应速度。过分调节某一个参数又会使系统其他方面的性能减弱。
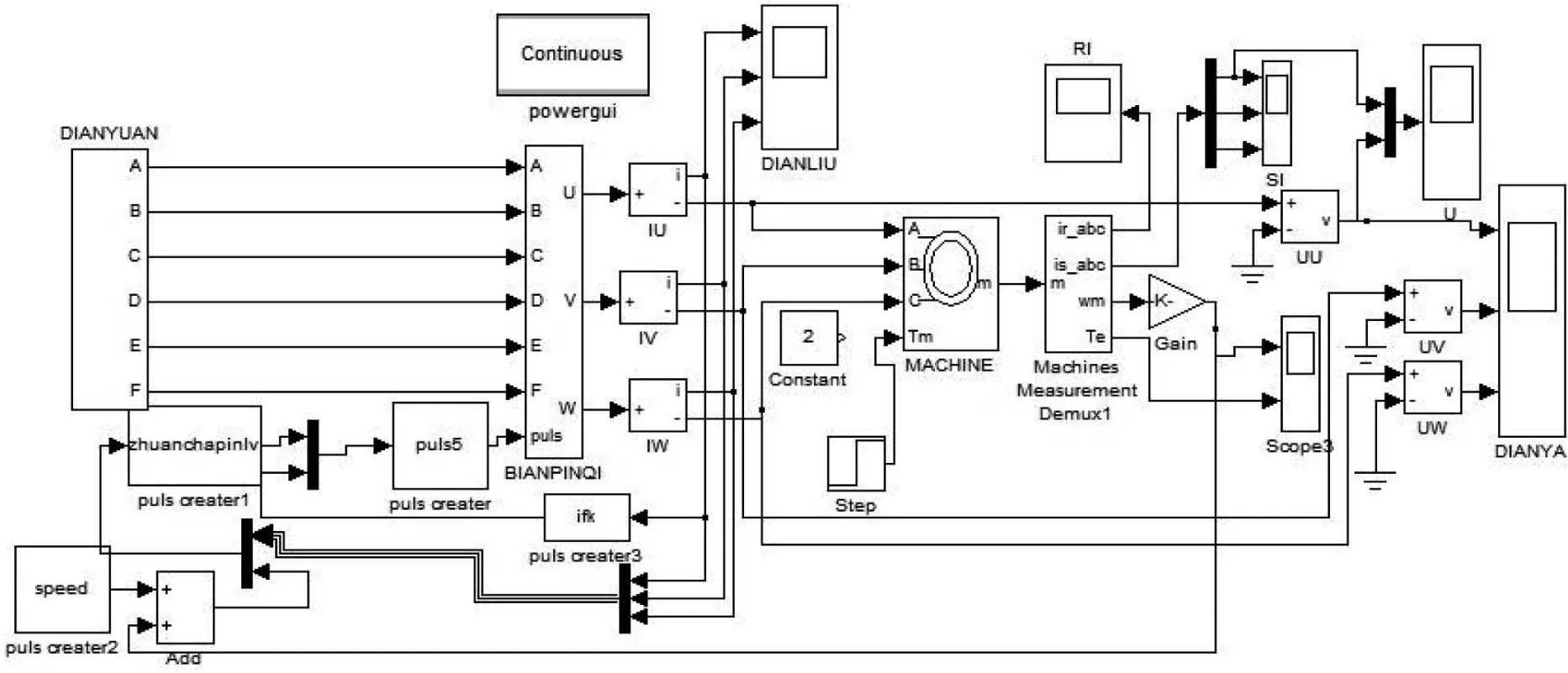
图3 交-交变频自适应控制系统仿真模型
3 仿真模型的建立
结合Matlab中Simulink环境下的电气结构特点,以及交-交变频器的主电路结构特点,文章建立了交-交变频器自适应控制系统的仿真模型,为了使系统的结构更加简洁明了,将相同功能的模块进行了封装,使其成为具有某一特定功能的子模块,如图3所示。由图可知该系统主要由电源模块,触发S函数模块,电机模块,脉冲触发及晶闸管模块,小电流检测模块和其他一些检测模块、电机负载模块、速度给定S函数模块和自适应控制S函数模块等构成[11]。
4 仿真结果及分析
本设计在建立的交-交变频自适应控制系统仿真模型中,加入专家PID控制算法,将专家PID控制规则写入到专家PID知识库之中,并结合交-交变频器实时在线的控制算法,对仿真模型进行仿真探索,并对仿真结果进行分析。
为了验证交-交变频器中加入专家PID控制算法后的效果,文章对仿真模型进行分频仿真研究,并对比加入专家PID控制算法前后的仿真效果,其对比效果如图4所示。在系统仿真的时候设定系统的负载转矩为1N·m,转速给定设置为650 r/min的仿真效果图,设定系统的静态误差为2 r/min。
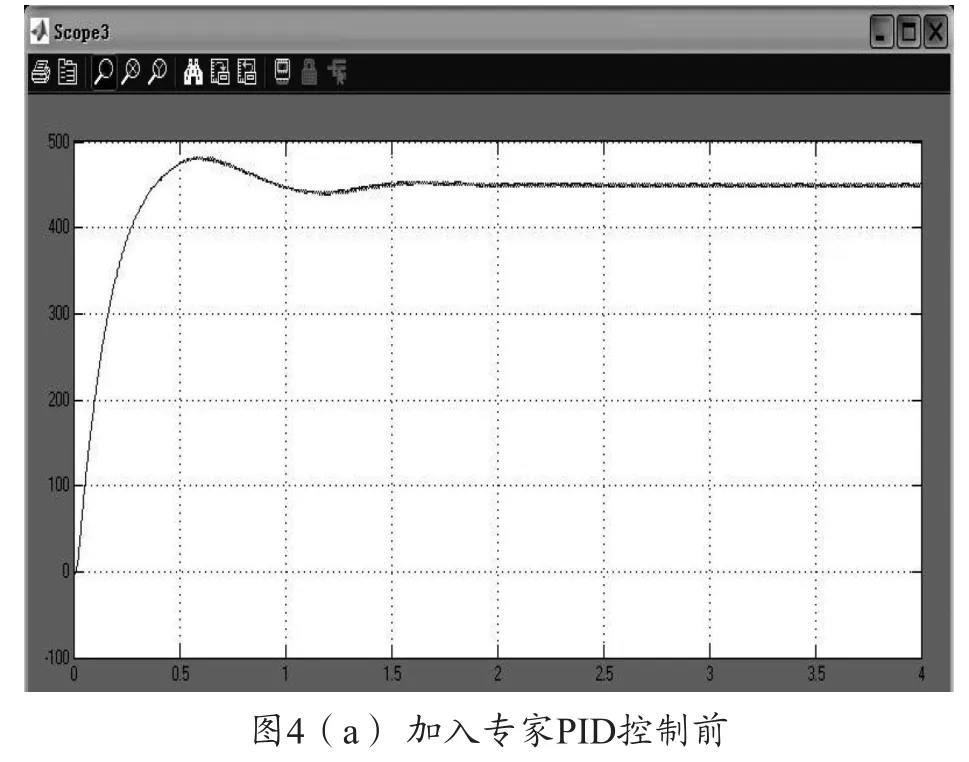
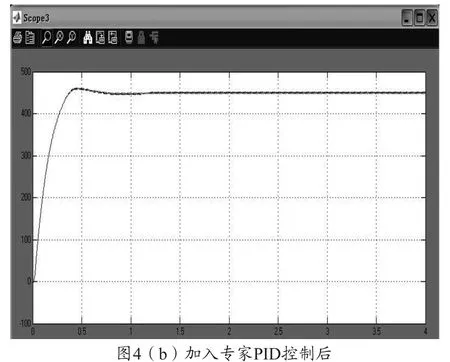
图4 给定450r/min交-交变频启动效果
对比图4中的(a)和(b)可以看出:在加入专家PID控制前,系统从开始启动,到系统最终稳定下来,总共用时0.8 s,并且在启动的过程中,系统出现了较大的振荡,超调量较大,其超调量为4.1%;加入专家PID控制后,系统总共用时0.6 s便稳定了下来,且系统在启动的过程中,没有出现大的振荡,超调量较小,该情况下系统的超调量为1.7%,由于设定了系统的稳态误差值,故系统稳定后的稳态误差较小,几乎无变化。
结合以上分析结果可以得出:在交-交变频调速系统中加入自适应策略后,尤其是在加入专家PID控制算法后,可以明显地降低系统的响应时间,减少系统启动过程中出现的震动,降低系统的超调量,增加了系统的稳定性。
5 结语
本文根据对交-交变频器调速原理的分析,在系统中加入了自适应控制策略,引入了专家PID控制算法,在Matlab/Simulink环境中搭建了交-交变频器自适应控制系统的仿真模型,并对该系统进行了简要的介绍。通过仿真对比分析了在加入专家PID控制算法前后系统的各项性能的状况;整体上由于在自适应控制策略中加入了专家PID算法,使得系统在调速的过程中,尤其是在启动过程中(论文中分析的是启动过程,其实对负载转矩突变,转速给定突变等情况同样适用)适应性增强,同时也提高了系统的响应速度,提高了系统的控制精度,降低了系统的稳态误差,使得系统能够完全适应外界因素的变化。仿真结果证明在交-交变频器中加入自适应控制策略可以明显提高系统的响应速度,提高系统的稳定性,降低系统的超调量,有利于实现工业控制中对各种工况的需求,可以大面积地推广使用。
[参考文献]
[1]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2000.
[2]王兆安,刘进军.电力电子技术[M].北京:煤炭工业出版社,2012.
[3]张林亭.交-交变频器的环流控制方法[J].中小型电机,1998(2):28-30.
[4]潘洪亮,姚建均.专家PID控制器在电液伺服系统中的应用研究[J].自动化技术与应用,2008(11):29-32.
[5]董泽,刘娜,韩璞.专家整定PID控制系统的设计[J].计算机仿真,2002(1):23-25.
[6]郭楠,李智.专家PID算法在伺服系统中的应用与仿真[J].机械工程与自动化,2009(6):61-63.
[7]曾向昌.基于专家PID控制的双闭环调速系统仿真分析[J].吉林工程技术师范学院学报,2005(3):29-33.
[8]彭花,周文祥.基于Matlab的专家整定PID控制系统设计与仿真[J].中国测试技术,2003(4):55-56.
[9]何芝强.PID控制器参数整定方法及其应用研究[D].杭州:浙江大学,2005.
[10]李瑞霞.智能PID整定方法的仿真与实验研究[D].太原:太原理工大学,2007.
[11]崔永红.基于不同调制波的双变量交-交连续变频特性研究[D].焦作:河南理工大学,2014.
[12]田力.六脉波双变量交-交连续变频调速系统闭环控制策略研究[D].焦作:河南理工大学,2014.
[13]刘霄.基于双变量交-交连续变频的双馈调速特性研究[D].焦作:河南理工大学,2014.
[14]刘华林,冯高明,王海军.基于Matlab的双变量6脉波交-交变频器特性研究[J].电气传动,2009(1):32 -35.
[15]杜庆楠,奚振武,冯高明,等.交-交变频自适应转差频率控制策略的研究[J].电子测量技术,2016(5):31-35.
猜你喜欢
制造技术与机床(2019年6期)2019-06-25
电子测试(2018年15期)2018-09-26
制造技术与机床(2017年6期)2018-01-19
中国交通信息化(2016年9期)2016-06-06
自动化学报(2016年8期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
图书馆研究(2015年5期)2015-12-07
电源技术(2015年9期)2015-06-05
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
组合机床与自动化加工技术(2014年12期)2014-03-01