农业机器人研究进展评述
2018-04-24 02:44李丹丹李会宾段玉林吴文斌
中国农业信息 2018年6期
李丹丹,史 云,李会宾,韩 伟,段玉林,吴文斌
(中国农业科学院农业资源与农业区划研究所/农业农村部农业遥感重点实验室,北京 100081)
0 引言
全球农业发展总体上经历了4 个阶段[1]:农业1.0——使用简单工具的传统农业[2],农业2.0——生物化学农业[3],农业3.0——以使用多种农机具为主的机械化农业[4],农业4.0——以物联网大数据为主的智慧农业发展[5]。随着我国迈入农业4.0 发展阶段,我国农业发展面临着“谁来种地,如何种地”[6]的问题,劳动力日益减少、小面积地块机械化程度较低,降低了我国农业的竞争力,迫切需要进一步转变发展方式[7],由“机器代替人力”、“电脑代替人脑”[8-10]。智能传感器[11]和农业智能机器人[12]的发展为解决该问题提供了方向。
农业机器人技术是集农学、地理信息科学、生物力学、机械学、计算机视觉、图像处理、生物传感、智能控制等诸多学科于一体的新兴研究领域[13],已经成为国际机器人领域的一个研究热点。目前,农业机器人在采摘[14]、植保[15]、巡查[16]、信息采集[17]、移栽嫁接[18]等方面都有应用,不仅促进了农业产业的发展,也促进了由机械化农业向智慧农业的转变。
全球农业机器人发展迅速,未来有更广阔发展前景和应用需求[19]。针对目前有关农业机器人研究现状仍不清楚这一现状,文章系统梳理和总结了近50 年来农业机器人的研究和应用状况,凝练存在的关键技术问题,以期提出未来重点发展方向。
1 农业机器人的起源与现状
1959 年,世界上第一台机器人诞生于恩格尔伯格先生的Unimation 公司[20];20 世纪70 年代初,斯坦福研究院首次采用人工智能学研发智能机器人Shakey[21];70 年代后期,日本开始了世界上最早的农业机器人研究[22];90 年代以来,各国开始研究发展精准农业[23],取得了一系列成果,农业机器人广泛使用促进了农田、果园等地块的机械化与智慧化[24]。
1.1 植保机器人
植保机器人可分为施肥机器人和除草机器人[25-27],施肥机器人能够根据土壤营养元素含量以及作物种类不同,自动计算和配比营养液[28],计算施肥量,达到精准施肥。由于机器人的作业面积小、作业灵活[29],其应用前景主要在变量施肥方面。变量施肥需要分析地块中各肥料含量,目前较常用的土壤肥力测量方法为定点测量[30],但是受到测量点数量有限、取点难以代表全部地块等问题的限制,定点测量无法满足机器人变量作业的要求。由此,目前实际应用中土壤肥力是否能即时分析与处理,是植保机器人发展中亟待解决的问题。
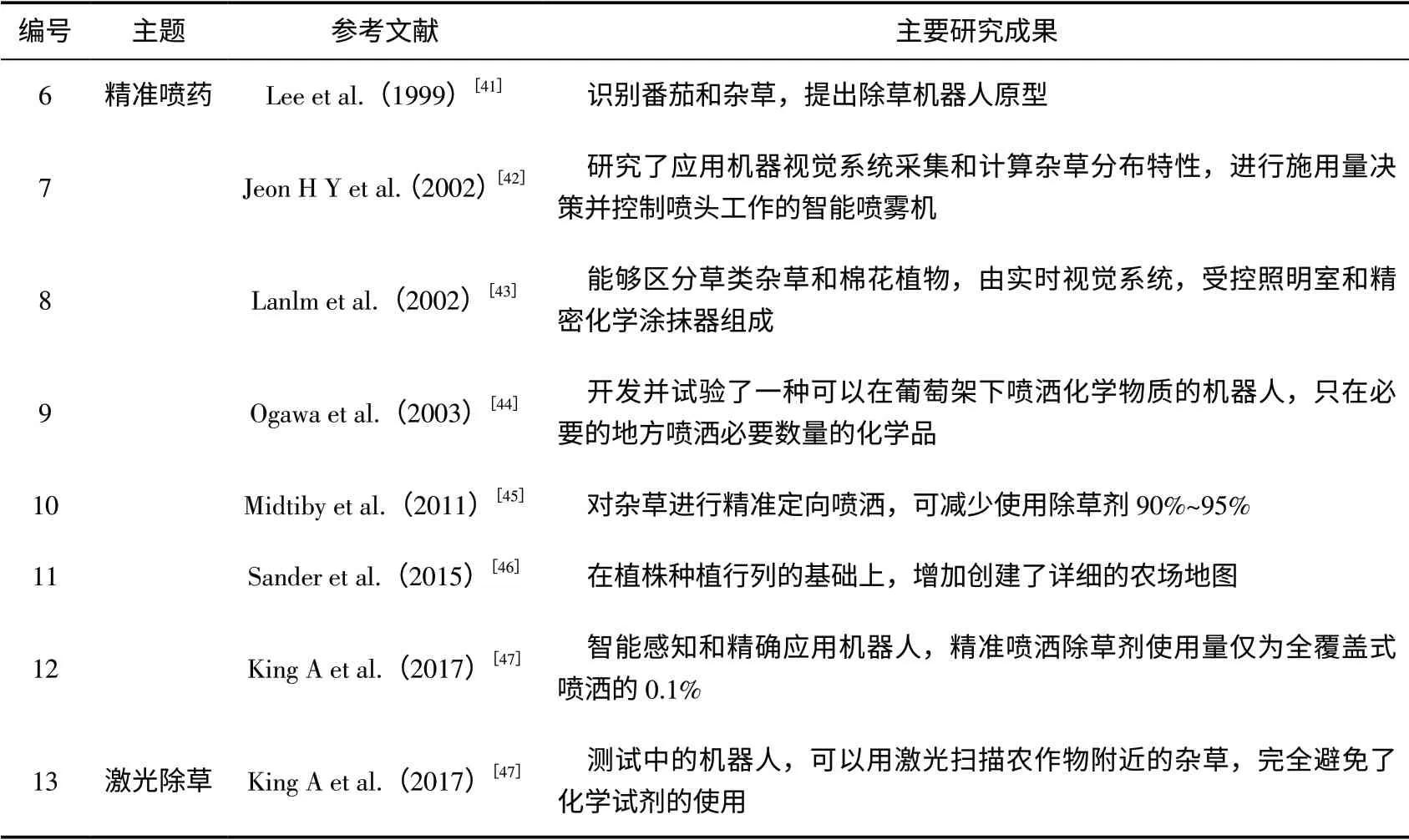
除草机器人是集环境感知、路径规划、目标识别和动作控制于一体的智能机器人系统[31]。除草机器人的研究从20 世纪60 年代开始[32],经过50 多年的研究,除草机器人的研究和应用快速发展(表1),目前其主要工作方式有3 种:(1)基于机器视觉,精确定位杂草目标的机械除草[33];(2)基于目标定位的除草剂精确喷洒[34];(3)基于目标定位的激光除草[35]。
续表
1.2 采摘机器人
果蔬采摘是生产链中最耗时耗力的一个环节,成本高、采摘期集中、重复性高[48],因此果蔬采摘的自动化具有重要意义。采摘机器人最早由美国学者schertz 和Brown 于1968 年提出[49],是初级的半机械半自动化方式,随着计算机视觉、机器人技术、人工智能的发展,以美国、日本为代表的许多国家,包括荷兰、以色列、英国、德国等国家在采摘机器人方面做了大量研究,取得了初步进展。采摘机器人的主要技术部分包括:果实的识别和果实位置的确定、采摘方式、机器人自动行走与导航[50](图1)。其中,果实的识别和果实位置的确定主要有灰度、阈值、颜色色度法和几何形状特征等方法[51];采摘方式主要为机械手[52],根据果实的生物特性,设计机械手的自由度、采摘方式与抓取成功率[53];目前大部分机器人使用轮式行走[54],还有根据不同地形与应用设计的履带式采摘机器人[55]与腿式采摘机器人[56],随着结构与应用的探索,出现了结合轮式、履带式与腿式的复合式机器人[57]。
1993 年,日本首先通过番茄果实和树叶的颜色对比,利用视觉系统检测出番茄在机械手坐标系的位置信息,寻找和定位成熟果实,研制了一台具有7 自由度机械手的番茄采摘机器人[58],采摘速度约为15 s/个,成功率约为70%,但是对于处于叶茎茂密处的成熟番茄,难以避开障碍物识别番茄,同时,该系统中视觉识别是基于2D 系统,若针对重叠的番茄或其他与叶片颜色相近的水果时,识别会非常困难。基于此,日本Ehime 大学研发了三维视觉系统[59],包含一个CCD 彩色摄像机、一个距离传感器和一台计算机。在此基础上,日本Shimane 大学进一步完善了视觉系统[60],包含3 个图像传感器、一个三维视觉传感器和一台计算机组成,提高了检测水平。1996 年,荷兰农业环境工程研究所研制了一种黄瓜采摘机器人[61],利用近红外视觉系统辨别黄瓜果实,机器人为轮式行走车,采用7 自由度机械手,实验工作速度为10 s/根。2018 年,日本学者提出了采用配备RGB-D 摄像头来检测番茄花梗,检测切割位置,通过切割花梗实现番茄采摘[62]。目前大部分采摘机器人都在样机或研究阶段,尚未进入大规模商业应用。主要难点及问题在于:果实的识别率低,定位精度较低;作业效率约为3~15 s/个果实,尚不能满足商业应用需要;果蔬通常比较娇嫩,机械采摘的伤果率较高;目前果蔬的采摘机器人通用性与利用率差。基于此,未来采摘机器人的发展方向在于:采摘目标的位置精准感知、机械臂的位姿控制与多种采摘方式结合、多传感器融合定位与导航控制技术、开放式结构机器人[63]。
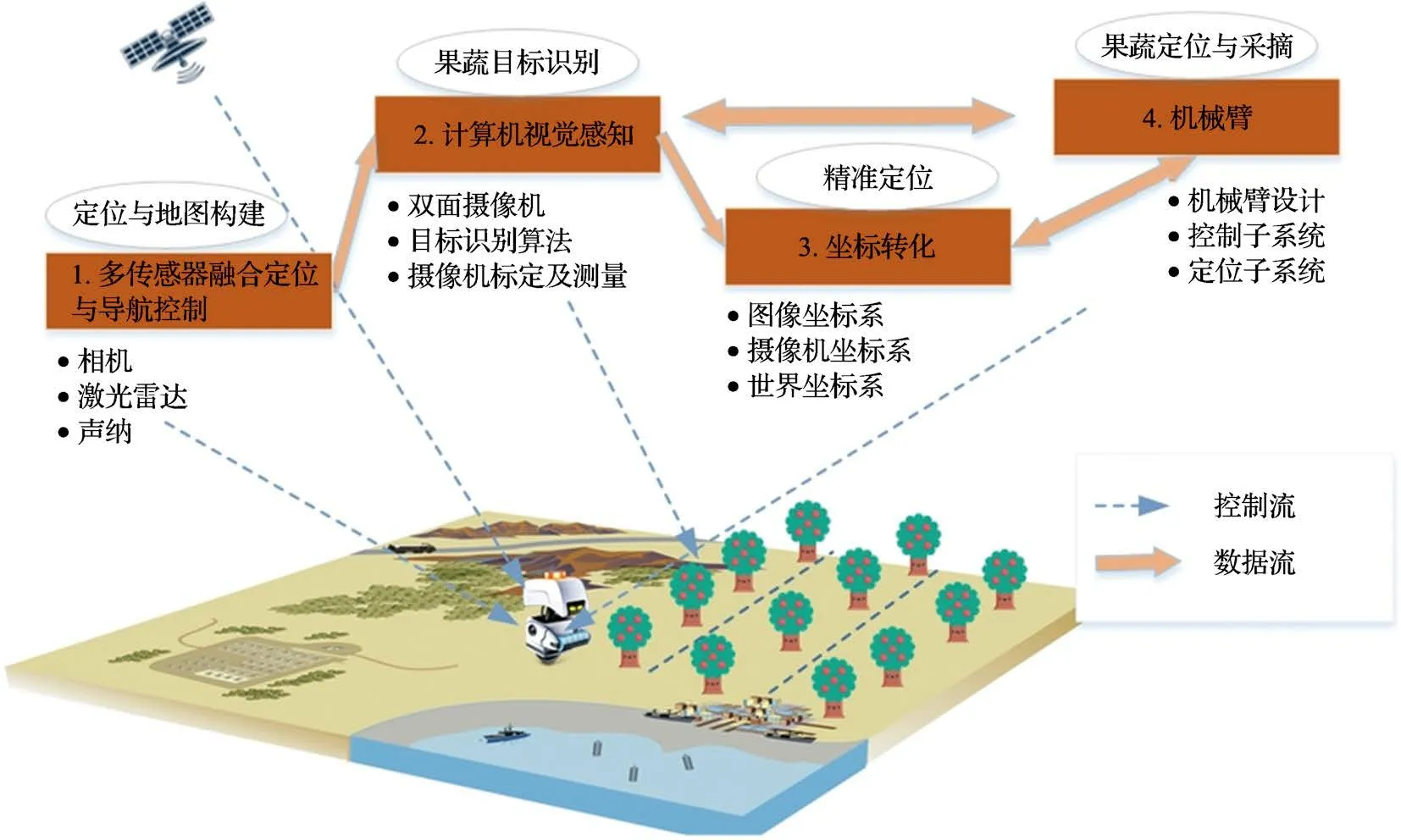
图1 采摘机器人主要技术方法Fig.1 Main technology method of harvesting robot
1.3 信息采集机器人
当前农业生产追求精准农业,实时监控各地块农田生物、温度、湿度及土壤信息等,目前农业信息的采集方式主要有以下几种方法(图2):(1)传统田间采样[64],需要人工采样并带回实验室分析,工作量大且测量成本较高。(2)固定采集器[65],集成GPS 和传感器的定位信息采集,美国Field Worker 公司的基于掌上电脑的信息采集软件Field Worker 能很好地满足精细农业的需要。通过与GIS 的连接,能实时采集带有空间位置属性的田间作物生长状态信息并能做相应的计算处理,为作物管理提供科学依据。此种方法教传统田间采样节省了人力,但是采集样点数量受传感器数量的限制,成本较高。(3)多平台遥感获取[66],遥感技术利用高分辨率传感器对不同作物生长期实施全面监测,根据光谱信息,进行空间定性和定位分析,为定位处方农作提供大量的田间时空变化信息。遥感信息作为GIS 信息的重要数据源,也可以补充实地采集的土壤肥力、杂草、虫害等数据。发挥遥感信息应用的巨大潜力,再加上高光谱遥感分辨率的提高,均为开展精细农业实施的尺度效应研究提供了理论可能,对于较大面积地块具有友好性,但是对于我国丘陵地区等小面积分散地块,遥感方法显示出了其精细度不足、更新不及时的缺点。(4)农田信息采集机器人[67],将采集农田信息所需的传感器安装在农业移动机器人上,自动采集农田信息。机器人体型较小且较灵活,适宜于农田信息的采集,目前国内外对其进行了一系列研究。
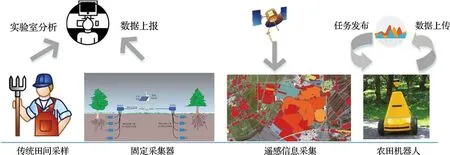
图2 农田信息采集方式Fig.2 Farmland information collection method
日本京都大学研究的六足机器人[68](图3-a),能够在田间行走并采集农业信息,如土壤的水量、肥量和农作物的生长状况等。它采用CO2传感器和风向仪进行导航,外形尺寸为270 mm×310 mm×170 mm,行走速度为1-2 m/min。
美国Grift 等人开发的watching-dog robot[69],在机器人上装有摄像头和GPS 接收器,用于自动采集田间信息,它能在农田中行走并寻找和定位长势不好的作物或者杂草。机器人采用四轮独立驱动的方式在田间行走,为了适应地形的复杂性采用了柔性的联动息架结构,采用电磁罗盘感知方向,激光测量系统导航,CAN 总线传输数据,行驶速度为0.14 m/s。
美国伊利诺伊大学开发的四足蚂蚁机器人群[70],用于田间巡视,通过无线蓝牙技术传递信息。丹麦奥尔堡大学的API(Autonomous Plant-care Implementation)[71]自主农业机器人(图3-b),是四轮驱动、四轮转向的移动机器人,通过全球定位系统、视觉系统和雷达系统采集作物信息,用户农田监测和自主作业。
美国迪尔公司发明的用于土壤测试的机器人车辆[72],在机器人上的装有一个或多个用于提取土样的探针,土样被采集回来后送到实验室,对采集的土样进行分析后得到数据,并把土壤数据存入数据库。
Garcia 等利用无线传感器网络构建分布式农田视频监控和数据采集系统[73],通过Internet 实现远程数据传输。Bak 和Jakobsen 提出了一种小型农田信息采集机器人[74](图3-c 和3-d),能够在作物行间穿行,用摄像头和GPS 接收器获得田间杂草的位置信息。
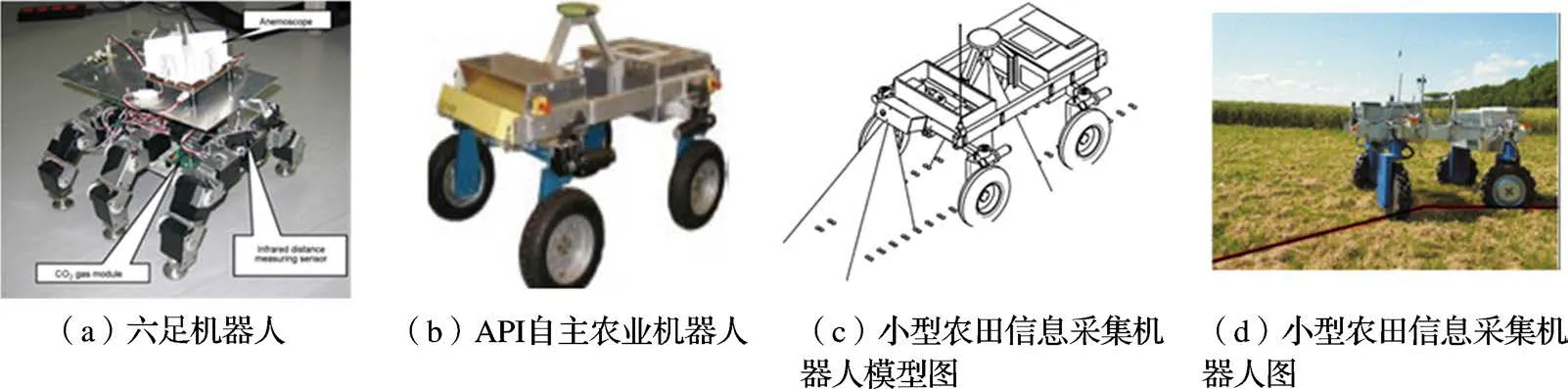
图3 信息采集机器人Fig.3 Farmland information collection robot
1.4 移栽嫁接机器人
随着人们生活水平的提高,人们对果蔬的品质要求也日益增高,但农作物的连作障碍、病虫害及植物对环境的适应性等因素严重制约了果蔬的产量和品质[75],为解决以上难题嫁接技术应运而生。
室内工作的农业机器人,将在温室大棚和生产车间里发挥作用。温室栽培包括育苗、嫁接、采摘、包装等多类作业[76],其他还有摘叶、防虫除草、搬运等工作需要反复进行,需要的劳动力多、劳动强度大,温室内高温、高湿、劳动环境较差,十分需要实现作业的自动化。
以嫁接问题为例。嫁接栽培是克服瓜菜连茬病害和低温障碍的最有效的途径,抗病、增产效果显著,广泛用于黄瓜、西瓜、甜瓜、茄子、番茄栽培,但人工嫁接速度慢、效率低、费工费时。嫁接机器人集机械、自动控制与设施园艺技术于一体[77],可大幅度提高嫁接速度,明显降低劳动强度,并可提高嫁接成活率。
1986 年日本在农业机器人研制的基础上,率先研制果蔬苗木嫁接自动化机器人[78],1987 年研制出半自动1 号试验样机G871,1994 年井关公司与日本生研机构协作推出了CR800T 茄科嫁接机(图4-a);三菱公司根据嫁接苗生产模式开发出MGM600 型自动嫁接机(图4-b);1993 年TGR 研究所开发出商品化茄科用嫁接机(图4-c);日本洋马公司2003 年发布了一款造价低的半自动瓜科嫁接机(图4-d)。
20 世纪90 年代初,韩国也开始了嫁接机的研制与开发[79],其中裕丰公司研发的小型半自动式嫁接机(图5-a)生产率约310 株/h,生产率较低但是运行稳定、成本低廉[80];Idealsystem 公司研发出针式全自动嫁接机(图5-b),主要针对茄科作物[81]。在欧洲,2010 年意大利Tea 公司研制出了半自动茄科嫁接机,荷兰的ISO 公司研制出了多种嫁接机器,分选幼苗机器(图5-c),全自动茄科嫁接机(图5-d)等。
我国在嫁接机器人方面也有较好的发展。1998 年,中国农业大学首次开发出2JSZ-600 型自动嫁接机[82]。2006 年东北农业大学研制并开发出了2JC-350 型插接式半自动嫁接机。2009 年浙江理工大学和浙江大学联合开展了基于插接法嫁接机的研究。2010 年华南农业大学与东北农业大学联合推出了2JC-600 型半自动嫁接机和2JX-M 系列嫁接切削器[83-84],并持续研究了全自动瓜类嫁接机。2011 年国家农业智能装备工程技术装备研究中心开发出了贴接法嫁接机器人。
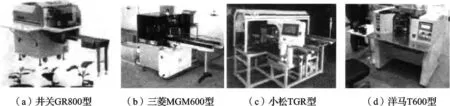
图4 日本的4 种移栽嫁接机器人Fig.4 Grafting robot of Japan
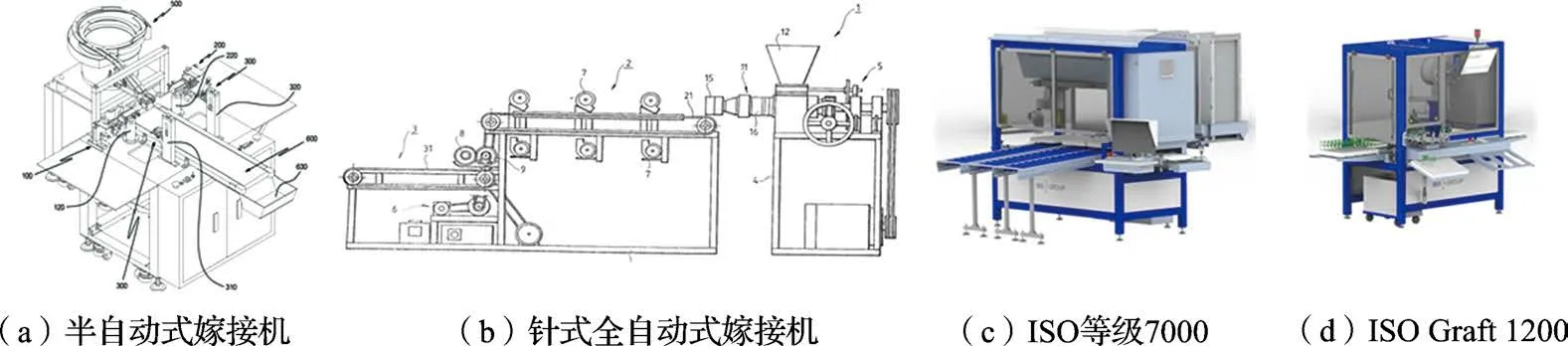
图5 其他国家的4 种移栽嫁接机器人Fig.5 Grafting robot of other countries
2 农业机器人的关键技术
农业机器人技术与其功能应用密切相关,但是具有包括机器人本体、传感器、通讯与数据分析等共性系统,其关键技术包括:自动行驶与路径规划、作物目标识别与分析、机械臂自主规划与控制、多机协作和智能交互[85-87]。
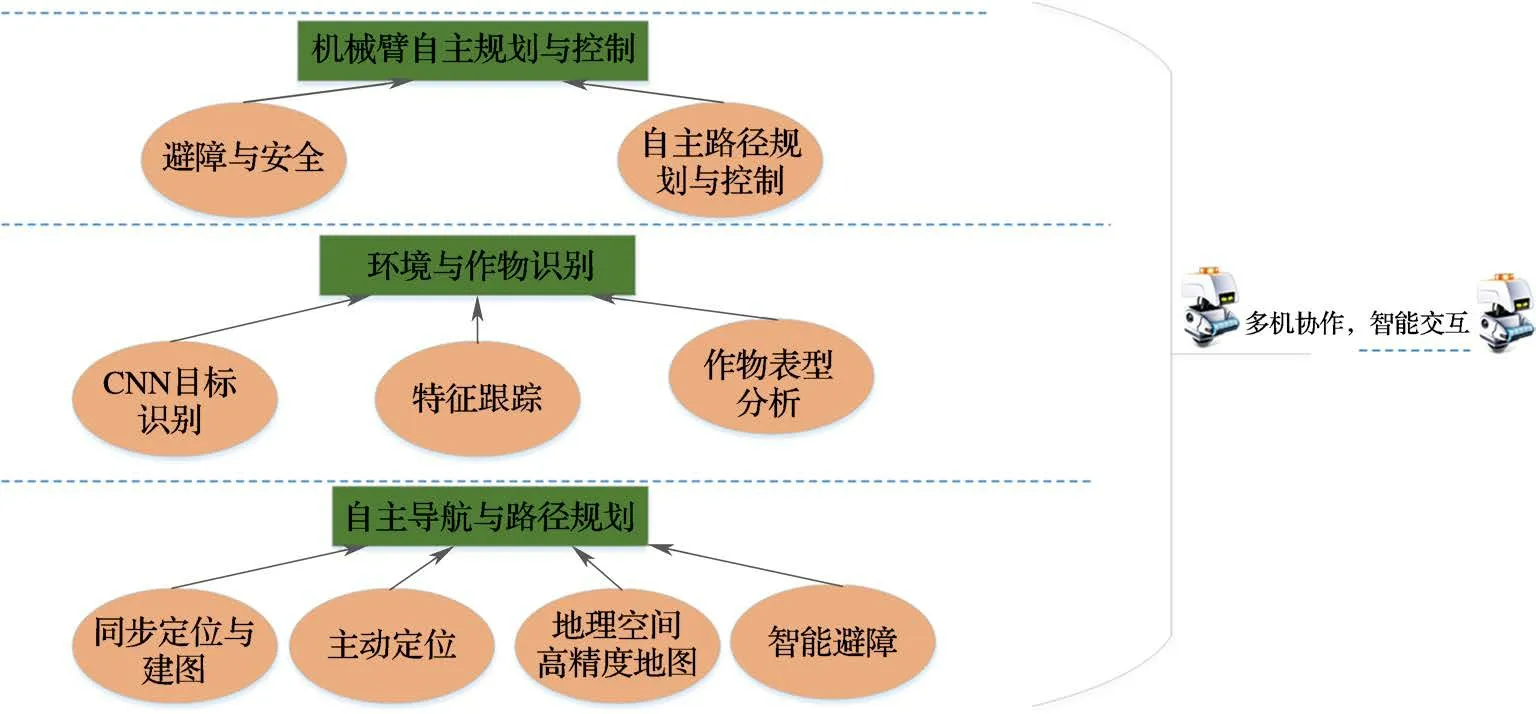
图6 农业机器人的关键技术Fig.6 Key technologies in agricultural robotics
2.1 自动导航与路径规划
目前实现机器人导航的主要方法有:全球导航卫星系统(GNSS)[88]、激光导航[89]、惯性导航[90]、电磁导航[91]、无线电导航[92]、视觉导航[93]、信标导航等[94]。
机器人导航的主要问题是利用机器人上的传感器获取定位和环境信息,使机器人按照预定的路线行走。导航需要的4 个基本模块是:感知、定位、认知和运动控制[95],关键问题包括:制图、定位、路径规划等。
2.1.1 多传感器融合
多传感器融合基于多个传感器的独立观测数据,通过多传感器融合提高测量精度,增加系统感知维度和健壮性。多传感器融合方法使得构建环境三维特征图更加简单,Auat 等[96]采用激光与摄像机相结合的方式,实现了三维地图的快速构建,Lepej 和Rakun[97]使用两个激光传感器提取特征做机器人的位置预估,以适应复杂的野外环境。荷兰学者利用3D 激光测距数据在车辆移动时提供车辆周围体积的最新扫描,实现动态避障[98];针对动态行人,日本学者提出了一种利用激光雷达对时间序列中的测量距离进行叠加,提高了行人识别精度[99];2017 年印尼学者提出了一种利用SLAM 在模拟农业区域生成地图的方法,通过微调SLAM-Gmapping 算法生成基于网格的立体图,结合激光扫描器的树位置检测和利用视觉传感器的水果检测,使用Gazebo 模拟器,生成苹果园的模拟地图,使用模拟器能够在复杂的田间地头环境中准确有效地模拟机器人种群[100]。
2.1.2 同步定位和制图
同步定位和制图(Simultaneous Localization and Mapping,SLAM)——当自定位和环境均未知时,要求机器人在不断运动的过程中通过传感器感知递增地建立环境的导航地图,同时利用已建立的地图同步刷新自身的定位[101];当前机器人搭载的主要传感器为视觉、激光、惯性测量单元、超声波、里程计等传感器[102],其流程图如图7 所示。
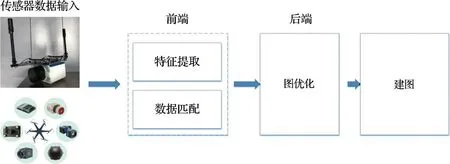
图7 视觉SLAM 流程Fig.7 Process of visual SLAM
SLAM 是目前机器人领域的研究热点,Endo 等[103]将LSD-SLAM 应用于视障人群的导航系统中,利用可穿戴摄像头估计视障人群的位置,帮助视障人群在行走中避开障碍物;Xiao 等[104]提出了一种改进的ORB-SLAM 系统,该系统与采用三角剖分算法的激光扫描方法相比,在12 m 范围内误差仅为35 cm;Santos 等[105]提出了一种基于二维扩展卡尔曼滤波器算法的EKF-SLAM 方法,提高了在陡坡和复杂的自然环境中建图的精度。
但是当前的点云地图对不同的物体并未区分,使得点云地图信息量有限,机器人只能获取哪里有物体,不能获取该物体是什么类别,使得地图的利用性十分有限。在语义SLAM 方面,有许多学者做了相应的研究工作,Haspelmath[106]和Haan[107]详细描述了如何绘制经典语义地图和一些技术问题,其基本思想是将传感器获取的信息分解成计算机能够理解的字符,计算机再将这些字符组合起来,对数据库中组合的结果进行查询匹配,并利用所得到的结果描述地图信息。Dabeer 等[108]学者将语义地标加入到三维地图中导航,提高了20 cm 的精度;帝国理工学院Andrew Davison 课题组通过RGB-D 相机构建场景点云,把点云特征与预先准备好的物体数据库中的物体进行比对,一旦发现匹配的物体就把预先存储好的精细点云放入地图,但是其做了地面水平的假设,使得放入地图中的物体都保持在一个水平面上,目前的语义SLAM 大多在高度可控的场景下进行,并需要提前建立好物体类别库,整个空间概念的语义图构建仍然存在许多困难,需要进一步的探索和研究。
2.1.3 主动定位
农业机器人工作中首先需要获取全局位置和当前位姿,才能进行下一步规划,定位分为全局定位和相对定位。在机器人定位领域,绝对定位一般分为信标定位、全球定位系统、地图匹配定位、概率定位等,相对定位包含航迹推算。当前,在农业领域,由于地面通常较粗糙且农作物生长密集、易受机械损伤,所以航迹推算和GPS 方法不符合精准农业标准。为解决这一问题,有研究人员将差分技术和GPS 技术相结合,提高了定位精度。PerezRuiz 等[109]研究了一种杂草控制刀的路径控制系统,定位精度达到0.8 cm,差分GPS 能够实现1cm 左右的定位精度,但是在非平原地区,由于其四面环山,这种环境会给基站的架设和信号传输带来困难,所以目前难以大规模推广。
声源定位[110]是机器人定位的另一种方法,机器人通过传感器或音频阵列获取环境的声音信息,然后对信息进行融合处理,判断声源的位置,从而为估计自身定位提供条件。Rucci[111]等模拟猫头鹰的捕猎行为,构建了一个两侧麦克风和一个摄像头的机器人头部测量系统,实现了声源定位。为了提高声源定位的定位精度,Gui 等[112]提出了一种基于十变量立体阵列的声学定位算法,平均定位误差小于1 cm。Su 等[113]提出了一种利用激光测距仪和麦克风阵列进行音频跟踪的方法,考虑了声音的反射和障碍物的遮挡,成功的检测到声源,误差在11.38 cm 内。
2.1.4 动态路径规划和避障
主动定位研究在导航地图已知的情况下,机器人如何规划和控制其运动路径,向能够获得更多有利于自定位的传感器感知的环境区域运动,从而尽快实现精确的定位;如何在导航地图中寻找一条由当前位置到目标位置可行的或最优的运动路径,并控制机器人沿该路径到达目标位置,是路径规划的主要研究内容[114]。
路径规划分为全局路径规划和局部路径规划[115]。全局路径规划一般应用于机器人运行环境中已经对障碍信息完全掌握的情况下,常用的算法包括有遗传算法、快速随机搜索树算法和蜂群算法以及相关算法的改进[116]。局部路径规划由传感器实时采集环境信息,确定环境地图信息,得到当前所在地图的位置及其局部障碍物分布情况[117],从而可以获取当前结点到某一子目标节点的最优路径。局部路径规划常用算法主要包括:人工势场法、模糊算法、A*算法等,此外,还有人工免疫算法、D*算法、滚动窗口法、事例学习法等。
机器人避障控制是路径规划中需要解决的子问题,可视作为局部路径规划中的一个环节。为了保障农作物、行人、机器人自身的安全,机器人需要对周围环境的感知及时做出快速的避障决策,由于障碍物和环境可能是不断变化的,在解决避障问题时,首先检测障碍物,再进行避障控制。结合机器人自身的运动速度和姿态估计避障的距离,确定避障的最小距离和最大避障角度。在避障控制方面,常用的研究算法有:BUG 方法[118],可见性方法[119],人工势场法[120],VFH 方法[121],动态窗口法[122]。
XU 等[123]利用BUG 算法解决了位置静态条件下导航中的避障问题。Souidi 等[124]对BUG 算法进行了改进,使传感器数据得到最优利用,减少了到目标的路径长度。Shi等[125]分析了人工势场法的不足,提出了一种提高规划路径平稳性的方法。kumar 和kaleeswari[126]利用VHF 方法对轮式机器人进行避障控制,并在机器人距离障碍物超过20 cm 时完成避障路径规划。这几种方法各有其独特的优势,也有其局限性。在农业环境中,农作物生长密集,农业机器人的工作空间不大,当需要避障时,需要尽可能和机器人保持较小距离,综上所述,避障在一般环境下取得了较好的成果,但是在农业领域,仍需进行进一步的研究与应用。
2.2 作物目标识别与分析
2.2.1 CNN 目标检测
农业机器人中作物目标识别有广泛的应用,包括病虫害识别、果实识别、目标跟踪等[127]。其中卷积神经网络(Convolutional Neural Networks,CNN)是目标识别的代表算法之一。CNN 由输入和输出层以及多个隐藏层组成,隐藏层可分为卷积层,池化层、激励层和全连通层。典型的CNN 模型包括:LeNet,AlexNet,ZF Net,GoogleNet,VGGNet;典型的基于CNN 的目标检测算法包括:R-CNN,Fast R-CNN,Faster R-CNN,R-FCN,FPN,Yolo,SSD,DSSD[128]。
2.2.2 作物表型分析
植物表型研究始于20 世纪末,其核心是获取高质量、可重复的性状数据,进而量化分析基因型和环境互作效应及其对产量、质量、抗逆等相关的主要性状的影响[129]。相对于单一性状,植物表型组能为植物研究提供全面的科学证据。2017 年,法国植物表型协会主席Francois Tardieu 和诺丁汉大学植物学家Malcolm Bennett 指出如何把室内、外表型研究中产生的巨量图像和传感器数据转化为有意义的生物学知识是下一阶段表型学研究的瓶颈问题[130]。
当前,各类表型数据采集装置主要包括空天地3 种采集平台,其中地上机器人包含的采集装置包括:可见光成像、超频谱、多频谱、超声波、激光雷达、热成像等[131],表型图像数据的处理分为:前处理、分割、分类及目标区域检测和提取。当前,机器学习算法和多源图像数据融合技术开始越来越多的应用在田间作物表型研究领域[132]。
2.3 机械臂自主规划与控制
机械臂路径规划指的是在机械臂所有关节运动范围内,保证机械臂的所有连杆在运动过程中不与障碍物发生碰撞的前提下,规划出一条从起点到终点的路径[133]。机械臂的避障路径规划的方法,一直分类方式是分为全局路径规划和局部路径规划。
全局路径规划分为A*搜索算法、Dijkstra 算法、RRT 算法、蚁群算法等[134];局部路径规划分为人工势场法、遗传算法、人工神经网络算法等[135]。
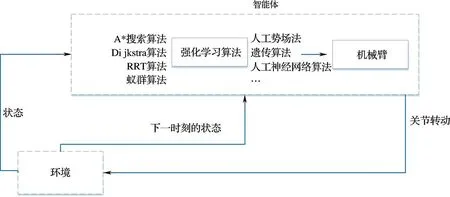
图8 路径规划Fig.8 Path planning of manipulator
A*搜索算法关注点到点的最短路径,荷兰学者设计了一款利用A*搜索算法的黄瓜采摘机械臂,首先获取机器人工作环境的传感器信息,再规划无碰撞的机械臂动作,将末端执行器引导至黄瓜采摘和送回[136],该算法易于实现且健壮性好,但是智能性较差且算法过于缓慢。Dijkstra 算法计算源点到其他所有点的最短路径长度。快速探索随机树算法(RRT 算法)是基于随机采样的路径规划算法,华南农业大学采用RRT 算法设计了智能荔枝采摘机械手,通过建立机械手和障碍物的碰撞检测模型,实现了避障路径规划,并提出了遗传算法和平滑处理来进一步优化RRT 的算法生成的路径[137]。蚁群算法是一种用来寻找最优路径的概率型算法。人工势场法是由Khatib 提出的一种虚拟力法[138],结构简单便于底层的实时控制,但是其在相近的障碍物群中不能识别路径。遗传算法是一种通过模拟自然进化过程搜索最优解的方法;人工神经网络系统是20 世纪40 年代后出现的,由众多的神经元可调的连接权值连接而成,具有大规模并行处理、分布式信息存储、良好的自组织自学习能力等特点。
2.4 多机协作和智能交互
多机器人协作的研究方面包括:多机器人体系结构、多机器人之间的协作、通讯、感知与学习[139]。
为了适应需求和降低人工成本,多个机器人在同一区域内协同工作,形成一个多机器人系统,此时多机器人环境探索和建模以及机器人间的有效定位问题尤其重要,以保证在后续路径规划过程中不会与其他机器人发生碰撞。在这方面研究人员做了大量工作。Andrew 等在机器人系统中设计了两种多机器人定位和建地图策略[140]。Alan C.Schultz等在证据栅格的环境模型下针对探索、定位、导航和规划4 个子功能的效用进行了评价,实现了机器人的有效集成[141];Daniel Meier 等针对机器人之间通信带宽的有限性约束,设计了多机器人搜索和建模策略[142];Rub 等设计了基于专职化的机器人群体协作策略[143];Agusti Solanas 等设计了未知环境中基于非监督聚类算法的多机器人协调探索[144];Ettore 等设计了Brick&Mortar 的多机器人搜索策略[145],通过增加搜索结束时间的限定和访问节点次数,有效地克服了蚂蚁搜索算法和多深度优先搜索算法的缺陷,实现了多机器人快速、高覆盖率地在线搜索功能。此外,瑞士苏黎世大学开展了生物机器人与群体智能研究[146],瑞士联邦工学院进行了多机器人任务分配和规划问题研究[147];比利时布鲁塞尔大学开展了关于集群机器人的系统研究[148]。
3 未来展望
通过对现有农业机器人和其使用技术的分析综述,不难看出农业机器人已经有许多成功的应用,也证明了农业机器人与机械化能给现代农业带来巨大的经济效益,有广阔的市场前景,但当前机器人在大规模应用方面还存在成本过高、通用性不足的缺点[149]。此外,人脑中约有100 亿~10 000 亿个神经元,若机器人集成一个如此多神经元的电路,其芯片重量可达2 000 t,耗电约20 MW,当前机器人身体无法集成如此庞大的大脑,将大脑放在云端,让100 万个机器人共享这个庞大的“大脑”是一种可行的解决方案。针对这两点,未来农业机器人发展需要重点考虑:(1)低成本高适应性的开放性机器人,农业机器人在软件与硬件两方面的设计均考虑开放性。硬件方面:机器人传感器可根据实际情况增减,控制部分留置空余接口;软件方面:支持二次开发及扩展,为人机协同和多机协作提供良好平台;(2)构建“农业大脑”智能决策体系,实现云平台—一体机—机器人的架构:云平台提供云计算服务,使物联网中数以兆计的机器人及其他终端实时动态管理,使得智能分析与处理成为可能,一体机为农业机器人田间地头的作业提供支持。随着人工智能、大数据、虚拟感知系统、多传感器融合等新技术的发展和应用,农业机器人将承担越来越多的农业作业任务,成为农业生产中的关键组成部分。
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
纺织科学研究(2021年1期)2021-12-03
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
电子制作(2019年22期)2020-01-14
中国外汇(2019年20期)2019-11-25
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07