
基于分布式结构的图书整理机器人系统设计
2018-04-23 12:09:22晁艳普
自动化仪表 2018年3期
晁艳普
(许昌学院机电工程学院,河南 许昌 461000)
0 引言
随着经济的飞速发展和科技的不断进步,图书馆、档案馆的规模发生了日新月异的变化。图书馆作为科技人才的知识库,应跟随时代的发展同步升级,但现有的图书馆管理仍非常落后。在目前的图书日常管理中,分类、整理、清点、运输和上下架等作业需要花费大量的人力和物力,有时还会出现图书分类错误[1]。如何实现图书的借阅、上架、下架、清点、整理、传送的机械化、自动化,是图书馆目前需要解决的问题。采用智能图书管理机器人是未来图书管理发展的大趋势[2-3]。
目前,国内外图书馆的图书自动存取技术主要采用以下三种模式[4]。一是在单个书架或书柜中采用自动化存取技术[5];二是以图书馆整体为对象,采用桁架式的立体仓储系统,实现图书的自动存取[6];三是在移动机器人精确定位的基础上,通过专用的机械手实现图书三维存取[7-9]。对于前两种方案,由于图书馆后续规模升级时,需要更换的设备较多,因此成本很高,日常管理较为复杂。而第三种方案由于制造成本低、扩展性和灵活性好[10],已成为目前图书馆自动存取、整理图书采用的主流技术方案。本文设计了基于分布式结构的图书管理机器人系统。该系统可以在无人干预的情况下,实现机器人的巡线定位、超声波避障、图书的取放和整理工作,具有效率高、体积小巧、实用等特点,在图书馆的日常管理中有很大的应用空间。
1 系统整体方案设计
图书机器人系统整体设计采用分布式结构。该系统由四层模型结构组成,分别是操作层、控制层、设备层和现场层。系统整体结构拓扑图如图1所示。

图1 系统整体结构拓扑图 Fig.1 The topology of overall system structure
操作层是整个系统的数据处理中心,能够进行人机交互。读者可以通过计算机选书界面进行图书的选取。操作层和控制层通过网口进行通信,实现各设备之间的数据传输和数据共享,经PLC控制器处理后发送指令给各模块,使各模块协调运动。设备层通过总线,对现场层各节点采集的信息进行处理,并把数据反馈给PLC;设备层由各节点分布式的I/O模块和现场控制器构成。现场层由现场传感器、机器人循迹运动机构和机械臂构成。现场传感器实时采集信息,并反馈给PLC。机器人先通过灰度传感器进行局部书框定位,然后通过械臂进行图书位置的精确定位,最后完成取、放书的动作。
2 结构设计
根据系统整体功能要求,为了实现图书机器人循迹移动、精确定位和自主取/还书等过程,本设计采用循迹移动底盘承载三轴运动机械臂的组合模式。这种结构使机械臂具有较大的工作空间和高度的运动冗余性,优于传统整体桁架式的立体仓储机械结构。图书机器人整体机械结构如图2所示。

图2 整体机械结构图 Fig.2 Overall mechanical structure
循迹移动底盘整体采用6160铝合金型材,以4个大功率直流电机作为动力驱动;移动轮子采用齿形轮毂外加防滑橡胶轮胎的组合方式,可确保机器人底盘具有足够的动力输出和较大的防滑摩擦力。底盘前后两端装有超声波传感器,底部装有灰度循迹传感器,可实现底盘移动过程中的避障和自主循迹定位。三轴运动机械臂中的X轴、Y轴和Z轴,用来实现图书位置的精确定位。三轴都使用42BYG步进电机作为动力驱动,采用同步带、螺母滚珠丝杠副传动和直线导轨作为传动机构。X轴和Y轴的有效行程为300 mm,Z轴的有效行程为500 mm,并具有断电情况下的自锁功能。各运动轴都设有零点和正负限位,对系统起到保护作用。三轴运动机械臂中的图书夹取装置采用铝合金材料,利用平行四边形机构原理进行设计。通过外加齿轮传动,能够将舵机转过的角度转换成卡爪的张开和闭合,从而实现对图书的夹紧和放松。该结构与传统采用气动卡爪的模式相比,无需气源和拖线,结构更紧凑、灵活性更好;通过传动机构,增强了夹紧力。通过加工和组装调试后,经实际测试表明,系统能够满足功能要求。
3 控制系统设计
3.1 硬件控制电路设计
本系统采用PLC和ATMEGA单片机作为主控单元。机器人循迹移动底盘采用ATmega328单片机,三轴运动夹取机械臂采用ATmega2560单片机。外围电路可以实现电压转换、接口通信、电机驱动、传感信号测量和开关量控制。主控芯片ATmega328单片机是一款高性能、低功耗的AVR(R)8位微控制器,拥有32个8位通用工作寄存器、2个8位定时器/计数器、6个脉宽调制(pulse width modulation,PWM)通道,可以满足多种功能模式的控制要求。电源转换模块采用TPS54331芯片和电阻、电容滤波,用于将24 V的电压转换成5 V和6~12 V直流电压,为单片机模块和驱动器公共端供电。接口模块采用CH340GISP芯片,使用互联网服务提供商(internet service provider,ISP)的下载接口。电机驱动电路采用TB6612FNG驱动器件。该器件的优点是:转速可调,抗干扰能力强;具有续流保护,PWM支持频率高达100 kHz,脉宽平滑调速;可实现正转、反转、制动和停止这4种电机控制模式。在实际控制过程中,要实现机器人的巡线定位、超声波避障和图书的自动取、还功能,需建立主控板与现场层传感器、运动机构和I/O设备之间的正确连接,以实现控制指令和数据的通信传输。整个系统的硬件控制接线示意图如图3所示。
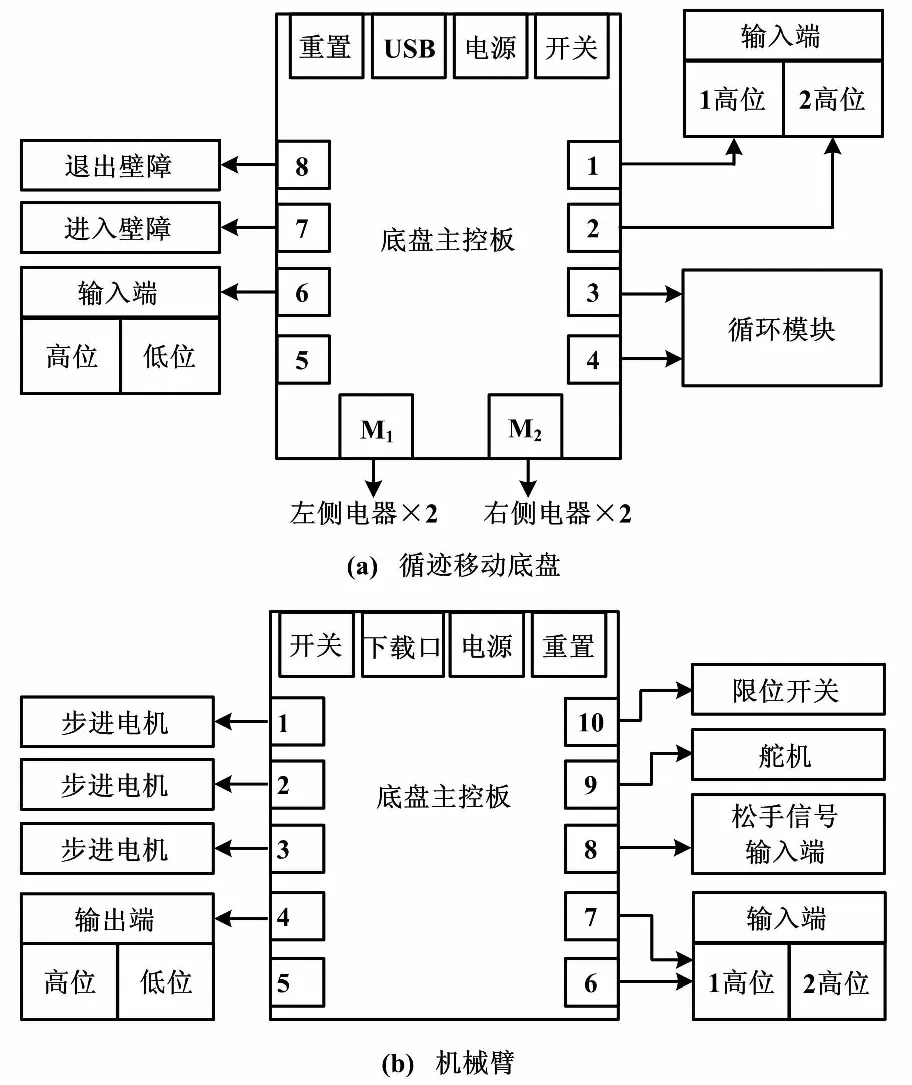
图3 硬件控制接线示意图 Fig.3 Schematic diagram of wirings of hardware control
图3(a)中:1号、2号接口为机器人底盘的输出端口。1号接口为高位,2号接口为低位,共同组成4个二进制信号(00、01、10和11)。将6号接口作为底盘主控板的输入端口,并分别将插头1和插头2作为2位二进制的信号接口。其中,插头1表示信号的高位,插头2表示信号的低位。M1、M2接口分别接底盘左侧的2个直流电机和右侧的2个直流电机。3号、4号接口分别接底盘正前方的巡线模块和底盘右侧的数点定位算法用的巡线模块。7号、8号接口分别接底盘前方的超声波模块和底盘后方的超声波模块。
图3(b)中:1号、2号、3号接口分别接图书夹取机械臂X轴、Y轴、Z轴的3个电机;6号、7号接口为图书夹取机械臂的主控板输入端口;4号接口作为图书夹取机械臂主控板的输出端口,分别将插头1和插头2作为2位二进制的信号接口。其中,插头1表示信号的高位,插头2表示信号的低位。9号接口为卡爪舵机端口,10号接口为限位开关。
3.2 控制软件及界面
根据图书机器人取/还书过程特点和硬件结构系统,控制软件系统主要由PLC总体控制程序、循迹移动底盘控制程序和图书夹取机械臂控制程序三部分组成。PLC采用循环扫描机制工作,在每个扫描周期都要完成自检、I/O更新、数据通信等操作。机器人开机后处于初始状态。当PLC给机器人发出对应书架信号时,机器人首先进行位置判断。到达指定位置后,向PLC发出到位信号,图书夹取机械手开始执行取书或者还书动作,机械手动作完成后输出一个动作完成信号。机器人循迹移动底盘控板接收到机械手动作完成的信号后,机器人返回初始点,取书或者还书过程完成,机器人自动执行下一次信号发出的程序。机器人PLC控制程序流程如图4所示。
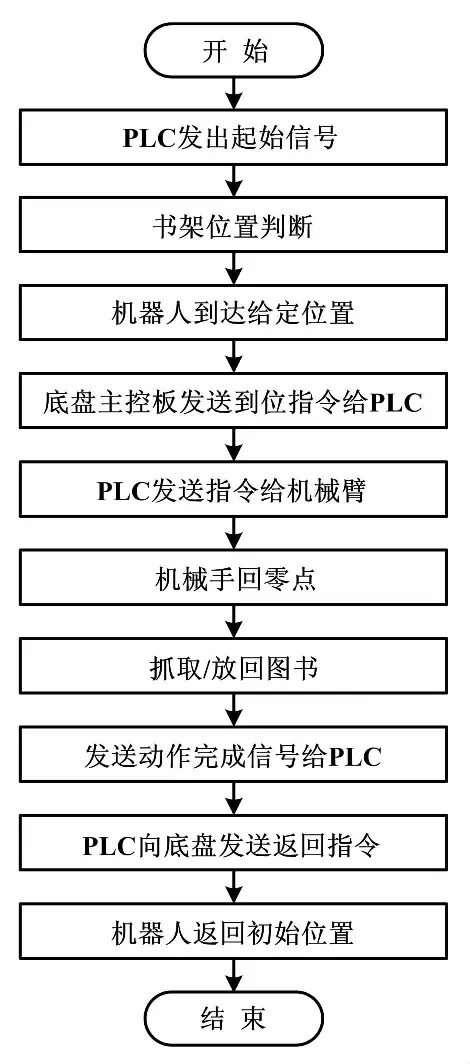
图4 PLC控制程序流程图 Fig.4 The flowchart of PLC control program
机器人循迹移动底盘控制过程中,当主控板检测6号接口的输入信号,并接收到来自PLC的图书位置信号后,运算得出书架位置。然后,检测超声波传感器前是否有障碍物。如果有障碍物,机器人循迹移动底盘停止前进;如果没有障碍物,则机器人继续前进。当运动轨迹偏离预定的轨迹时,机器人会根据底盘前面的巡线模块回传的数据,及时修正行驶路线。当达到图书所在书架位置后,位于机器人右侧的传感器会及时传输返回信号,机器人退出巡线避障模式,停止运行。
图书夹取机械臂控制程序流程图如图5所示。首先,主控板接收到PLC的取/还书信号,夹取机械臂平台等待接收到PLC的图书位置信号。然后,夹取机械臂的X轴、Y轴和Z轴执行复位程序;X轴、Y轴和Z轴分别动作到位后,夹取机械臂卡爪的MG995舵机转动;卡爪完成动作后,等待PLC发出松手信号。卡爪松开后,整个夹取机械臂控制程序结束。

图5 机械臂控制流程图 Fig.5 The control flowchart of the manipulator
为了实现取/还书的人机交互和图书信息的存储管理,在visu+软件平台上开发了智能图书机器人,即人机交互取/还书系统。通过与PLC通信模块的通信,完成了过程数据的监控、记录查询、报警信息查询和参数设置。人机界面按功能划分为取/还书控制区和运行监控区,并由实体化的图标与按钮来组态,使图书管理人员更容易理解与操作。在取/还书控制区,操作者可以通过组态按钮,选择要借阅和归还的图书名称;后台的数据库会将图书的数据信息发送给PLC;PLC通过协调控制循迹移动底盘和图书夹取机械臂的运动实现图书的取或还。运行监控区实时采集循迹移动底盘和图书夹取机械臂的运动轨迹信息,并通过数据仿真图书机器人的运动过程。
4 试验测试
为了验证所开发系统的可行性,本文通过visu+开发人机交互取/还书界面,分别选择两本需要借阅和归还的图书信息。图书机器人根据图书的数据信息,利用PLC发出图书位置信号。主控单片机板接收到PLC信号后,驱动移动底盘利用巡线模块识别地上的黑条来巡线移动和数点定位,并到达图书所在书架位置。图书夹取三轴机械臂复位后开始进行取/还书动作,依据PLC得到的图书信息计算出图书的精确位置。舵机驱动卡爪能够准确完成图书的夹取和松开,并返回初始状态。试验结果证明,所开发的系统满足设计和使用要求。
5 结束语
本文设计了一种基于分布式结构的图书整理机器人系统。该系统采用PLC和单片机作为主控单元,利用超声波和灰度循迹传感器,实现实时避障和巡线定位;通过人机交互取/还书界面,选取不同的图书,在PLC和单片机的协调控制下,能够准确完成图书的自动借阅和归还。试验结果验证了开发系统的可行性和正确性。但该系统还存在一定的不足,需要进一步完善、升级。今后,可以扩展其自动充电、语音交互、机器视觉和RFID识别功能,使之更加信息化和智能化,为后续推广应用奠定技术基础。
参考文献:
[1] 方建军,张晔.图书馆图书自动存取机器人的研究与应用[J].图书馆建设,2012(7):79-83.
[2] 王田苗,淘永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(9):1-13.
[3] 冯凌,杨华夏,魏东.分体式电缆隧道检测机器人的移动结构研究[J].自动化仪表,2017,38(6):46-50.
[4] 张振,张琪,王新,等.基于主从式结构的智能图书整理机器人的设计[J].电子设计工程,2014,22(3):120-123.
[5] 卢尧,任晓明,吴勇志,等.智能仓储控制系统的设计与实现[J].自动化仪表,2017,38(2):28-30.
[6] 曹斌,董伯麟,柯振辉.基于运动控制卡的桁架机器人控制系统设计[J].制造技术与机床,2017(3):25-28.
[7] 李森,潘小琴,钦盼琛,等.基于远程控制的双轮安防机器人系统设计[J].自动化与仪表,2017,32(5):30-34.
[8] 彭攀来,马娅婕,刘智旸.基于Arduino的移动机器人控制系统设计[J].自动化与仪表,2016,31(3):14-16.
[9] 栾禄祥.室内移动机器人机器视觉定位系统的设计[J].自动化仪表,2017,38(2):49-52.
[10]赵扬,刘庆花,赵玉奇.基于PLC的间歇反应装置控制系统的设计[J].自动化仪表,2017,38(2):15-17.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
中国电业与能源(2021年4期)2021-05-22 00:39:42
广西电业(2020年11期)2020-03-23 07:14:14
电子测试(2018年15期)2018-09-26 06:01:14
无人机(2018年1期)2018-07-05 09:51:06
电子制作(2017年1期)2017-05-17 03:54:20
电子制作(2016年11期)2016-11-07 08:43:49
学习月刊(2016年19期)2016-07-11 01:59:38
专用汽车(2016年4期)2016-03-01 04:14:20
汽车维修与保养(2015年6期)2015-04-17 03:31:48
