
微小型无人机外方位元素误差改正研究
2018-04-20 11:59朱光兴杨莎莎
世界有色金属 2018年3期
朱光兴,黄 芳,杨莎莎
(贵州省第一测绘院,贵州 贵阳 550025)
1 研究背景
无人机(Unmanned Aerial Vehicle,UAV)航空遥感系统是高分辨率及高精度遥感影像获取和处理的崭新技术,是航空航天等遥感技术的有力的补充[1]。它在测绘,数字城市建设,灾害应急处理,重大工程建设,国土监察等领域拥有独特的优势。
本文分析了微小型无人机外方位元素的误差原因和改成原理并且提出了一种基于sift影像匹配算法的微小型无人机外方位元素改正方法。
2 外方位元素系统误差分析
2.1 外方位元素误差分析
在对相片外方位元素进行分析时,通过原始外方位元素数据和利用已知控制点进行过空中三角测量校正数据处理后的外方位数据进行对比发现,系统误差主要存在于(X,Y和K)三个外方位元素。经过分析,引起这三个外方位元素的误差主要为GPS航带间相对定位误差和角定向元素存在的相对系统误差。

图1 GPS相对定位误差示意图
2.1.1 GPS航带间相对定位误差
GPS航带间相对定位误差产生于无人机各个独立航带之间(与地面控制点无关),即相邻航带的遥感影像的相对误差。其产生的原因包括:
GPS定位延时等误差。
GPS摄影相机之间记录时间不一致引起的误差。
这两种误差不会引起统一航带间相片的相对误差,但是会引起相邻的两个航带间的相片间较大的相对误差。
如图1所示,上述两种误差会导致GPS记录数据存在“延时”的情况,飞机GPS系统记录的坐标信息(X,Y)不是相机主点所处的位置信息(X1,Y1),这种“延时”误差会在两条相邻航带间的相片间产生误差(△X,△Y)既GPS相对定位误差。
2.1.2 角定向元素存在的相对系统误差
角定向元素相对系统误差产生的原因:
(1)INS系统与相机CCD坐标轴系之间的系统误差
由与INS系统与相机安装工艺的影像,INS系统和相机的CCD的主轴之间存在一定的夹角差。
(2)非量测相机机械误差
非量测相机扫描阵列不平行于光学影像,致使数字化影像相对于光学影像有一定的旋转的误差。
上述误差会引起相片的三个角外方元素(Kappa、Phi、Omega)误差,其对Phi,Omega的影响可以忽略不计,主要影响Kappa元素这个外方位元素有较大误差。
(3)外方位元素系统误差改正原理
2.2 GPS航带间相对定位误差改正原理

图2 GPS航带间相对定位误差改正原理示意图
由GPS航带间相对定位误差分析可知,GPS航带间相对定位误差主要由GPS定位“超时”或“延时”现象的时差(△T)引起,为了简便计算,假设无人机的飞行速度为匀速飞行(速度V),时差引起相片的位移误差为S=V×△T,位移误差S在飞机匀速飞行时为一近似固定值。
由图2可知,航带二中相邻影像的位移误差为S,航带三中相邻影像的位移误差为S’,则航带三,航带一影像相对于相邻航带航带二影像的位移相对误差S+S’,航带一和航带三间的相片相对位移误差则可视为零。
将航带二的影像平移S+S’改正,则各个航带间就可以组成严密的区域网平差模型。S+S’反映到影像的外方为元素上即为影像主点坐标(△x,△y)的差值。需要改正的航带间系统误差则为(△x,△y),对航带二中的影像进行采样,求得样本的(△x,△y),最后根据统计方法即可得到航带间影像的相对定位误差,改正方程如下:

3 外方位元素误差改正
本文提出一种利用SIFT影像匹配算法和空中三角测量的方法来计算原始采样影像的像点值(像片坐标和地面点坐标),最后对样本影像进行单向空间后方位交会求得影像的外方位元素,进而求得原始影像的样本的外方位误差改正值,改正所有影像的外方位相对系统误差。
3.1 关键点方向分配
微小型无人机的方向元素的误差会引起影像的旋转误差,为了消除这种误差对影像匹配带来的影响,SIFT算法利用对关键点的邻域像素的梯度方向和梯度幅值进行计算,为每个关键点计算赋予了方向特征,从而使关键点对遥感影像的旋转具有不变性的特征。

式(1)为遥感影像(x,y)处梯度的幅值值和方向公式。其中L所用的尺度为每个关键点各自所在的尺度。利用这梯度的幅值和方向公式我们可以为关键点赋予方向信息。
3.2 单像空间后方位交会
单像空间后方交会是指根据单张航测像片上的一定数量的已知点既SIFT算法匹配的同名点,这些点的像片坐标和地面点坐标(空中三角测量)已知,利用这些已知信息求得影像的外方位元素


图3 单像空间后方位交会示意图
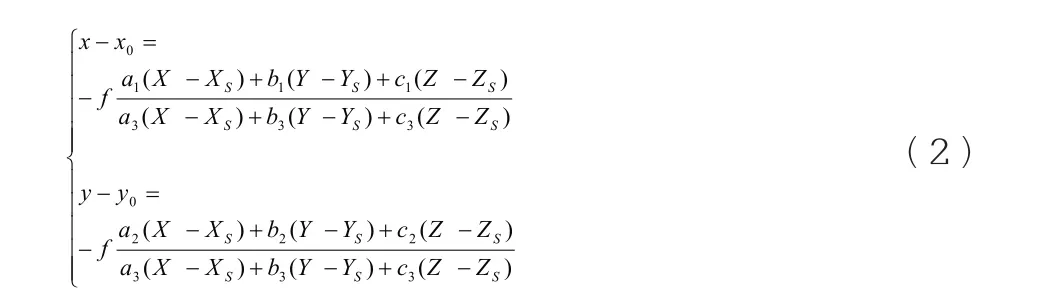
x0,y0影像像主点坐标
x,y,-f影像像方坐标和焦距
3.3 外方位元素误差改正方法
(1)对原始的影像进行采样,得到需要进行数据处理的影像样本。本文对偶数航带进行了样本采样,每个偶数航带选取的3张影像,分别位于航带的两端和中间区域,奇数航带间的影像保留。
(2)利用SIFT影像匹配算法对组成区域网的影像进行自动匹配,自动选择同名点。经过试验选择影像的初始尺度为1.52进行匹配。

图4 SIFT影像匹配示意图
(3)对奇数航带影像分别进行单航带空中三角测量,单航带空中三角测量后可以认为影像的定位误差已经均匀的分布于整体航带中,而此时偶数航带采样影像的同名点坐标值则已经计算出来,该影像上分布有与其相邻的同名点,根据同名点计算的外方位元素对两条航带都具有一定的匹配度,其对两条航带的相对误差也最小。
(4)利用偶数航带样本的改正统计值代如式(3)对所有的影像进行外方位元素改正。

(5)利用新的外方位元素多微小型无人机进行遥感影像自动化处理。
4 结论
实验对比可知,对微小型无人机拍摄的影像经过了内外方位元素改正之后,不论是影像的处理速度还是摄影测量的精度都得到了显著的提高,本文研究的外方位元素误差改进方法可以大大的提高微小型无人机遥感系统的响应时间,实现了微小型无人机遥感影像快速的自动化的处理。本研究的方法对于缩短对突发事件的响应周期,最大化的发挥微小型无人机影像的应用有重要的作用。
[1]金伟,葛宏立,杜华强,等.无人机遥感发展与应用概况[J].遥感信息,2009,1:88-91.
猜你喜欢
今日农业(2021年8期)2021-11-28
建材发展导向(2021年11期)2021-07-28
作品(2020年4期)2020-05-11
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
课堂内外·创新作文小学版(2017年1期)2017-06-01
中学生理科应试(2017年2期)2017-04-01
新高考·高一物理(2015年5期)2015-08-18
装备环境工程(2015年5期)2015-02-28
中国卫生(2014年2期)2014-11-12
