逆向工程数据处理的简化方法
2018-04-19 07:18:57幸鑫
邢台职业技术学院学报 2018年1期
幸 鑫
逆向工程数据处理的简化方法
幸 鑫
(重庆科创职业学院,重庆 402160)
文章所指的工程是反向创造的过程,即从现有的部分数据通过使用扫描或测量装置重建其现有的部分。三维激光扫描仪已经变得更加准确、数据采集的速度急剧增加。但是,它每秒产生数千点,处理大量的数据是一个大问题。因此,必须减少获得点数据,并将它转换成生产过程所需的格式。本文提出的方法可以有效地减少点数据的数量,同时保持精度。
减少点数据;逆向工程;三维激光扫描仪;均匀和非均匀网格方法
一、激光扫描逆向工程
逆向工程过程包括点数据采集、噪声过滤、数据简化/排列/注册、分割、曲线/曲面拟合和三维表面模型生成[1]。数据采集被认为是反求工程的关键步骤,因为原始数据的质量决定了结果表面的质量。一旦原始数据在扫描过程中产生噪声数据点,即所谓的离群值或峰值,必须通过删除、平滑和合并等预处理予以消除,从而提高点数据的质量。消除峰值的方法如下:
(1)考虑两个连续点之间的角度,并且与前一个大于给定值的点成一个角。
(2)峰值点可以移到中值。
(3)在允许的距离内,点可以沿指定的轴向上或向下移动到指定的水平位置[2]。
删除峰值之后,应考虑扫描装置的特性来执行数据缩减方法。
1.三维激光扫描仪
3D激光扫描装置获取部分表面信息,通过激光束从表面发射和CCD相机感应来接收。激光束通常可分为点型和条型,条型扫描仪照射到表面上可以得到多个点,而点型扫描仪一次只能获得一个点。根据配置不同,激光扫描设备可分为三类,如图1所示。

图1 激光扫描设备分类
当激光探头扫描一个物体时,由CCD相机感测到的光线作为强度数据存储在像素中,然后通过图像处理和三角测量方法将此信息转换为扫描点的三维坐标。图2显示了三角测量法的原理。
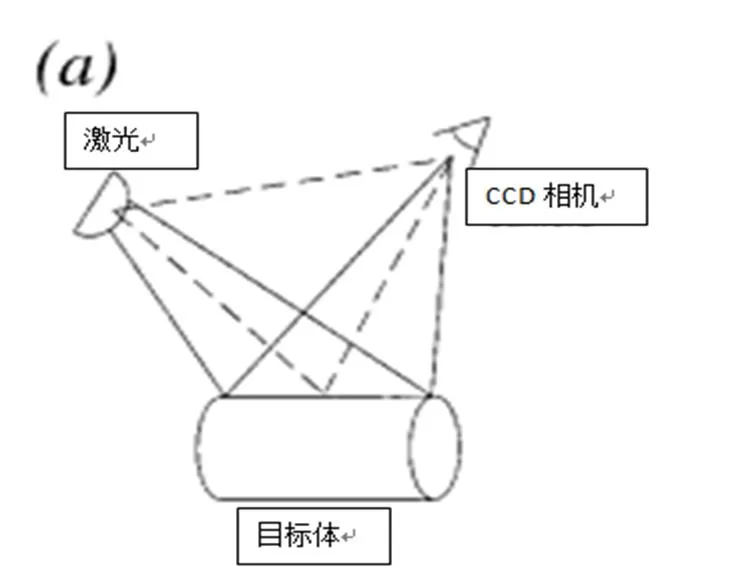
图2 三角测量方法

图3 扫描操作
本文中使用的激光扫描仪属于第一种类型,它使用一个探测器,沿着图3所示的扫描路径移动时发出一系列激光条纹。三维点坐标x和y是根据探头直接由运输机构控制的位置获得,此时x和y值是可靠的,但一般的z值显示精度差,因为Z值由CCD摄像机处理检测射线测定,Z轴的误差范围从0.01mm到0.10mm,主要取决于扫描设备的质量。因此,由激光扫描仪产生点云数据时,应该控制z轴误差以产生精确的表面。
2.使用均匀网格的点数据缩减方法
通过将数据划分为网格并从每个网格中采样代表点,可以减少点数据的数量。由于激光扫描仪的特点,z值误差大,所以在网格中使用中值滤波。首先,网格面是由与扫描方向垂直的大小相同的网格组成,数据缩减率由网格大小决定,网格尺寸越小,整个点云中采样的点越多。在创建一个均匀的网格平面之后,所有的点都被投影到网格平面上,并且每个网格被分配相应的点。其次,从每个网格中选择一个点中位数筛选规则[3]。每个网格中的点按照到网格平面的距离进行排序,并选择一个位于中间的点,如图4所示。
使用均匀网格的中值滤波,那些被认为是噪声的点很可能被丢弃。如果扫描的表面垂直于扫描方向,则该方法表现出更好的性能。这种方法对于保持原始点的数据是很好的,因为它选择点而不是改变点的位置。均匀网格法特别适用于表面相对简单的零件必须快速减少数据的情况。
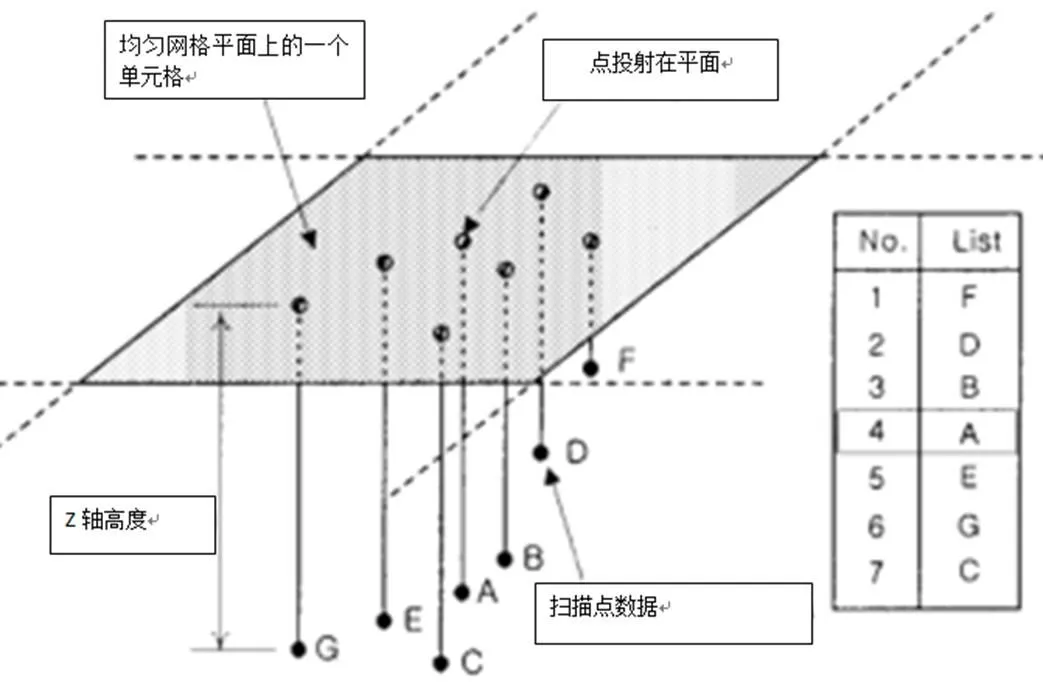
图4 均匀网格方法
二、使用非均匀网格的数据缩减方法
应用均匀网格法时,由于没有考虑零件的形状,所以零件形状急剧变化的一些点,可能会丢失。本文提出了非均匀网格方法,其中网格的大小可以根据零件的形状而变化。根据测量数据的特点提出了两种非均匀网格方法:单向和双向。
1.单向非均匀网格法
在单向非均匀网格法中,使用角度偏差法从部件表面获取的点云中采样,如图5所示,角度偏差法根据由连续的三个点构成的矢量,例如(x1,y1),(x2,y2),(x3,y3)计算的角度来选择点。

图5 角度偏差法
角度表示曲率,当角度小时曲率小,反之[4],使用这些角度,可以提取高曲率的点。由角度偏差提取的点表示高曲率区域,并且在数据缩减期间必须保留它们以精确地表示零件形状。因此,如图6(a)所示,在使用角度偏差法提取点之后,根据提取的点来划分沿v方向的网格,在划分网格时,如果网格大于用户预定的最大尺寸,则进一步划分网格以使其不超过最大网格尺寸图6(b)。然后,将中值滤波应用于每个网格中的点。与均匀网格方法相比,该方法在保持零件形状精度的同时能够更有效地减少点数据。

图6 单向不均匀网格生成
(2)双向非均匀网格法
在双向非均匀网格法中,计算各个点的法向矢量,并根据这些信息进行数据缩减。首先,在确定点的法向矢量时,使用相邻三角形的法向矢量。如图7所示,对于点p,六个相邻存在三角形,并且点N的正常值可以使用式(1)。
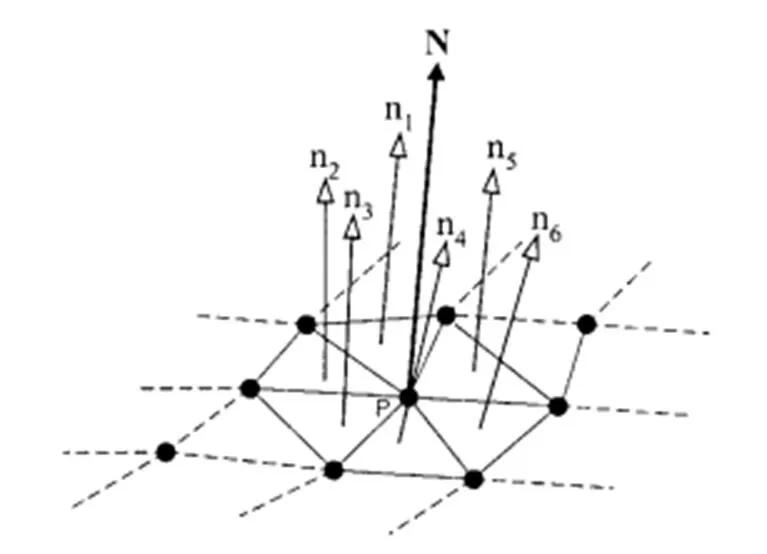
图7 正常值计算

在计算所有点的法向量时,生成网格平面,网格大小由用户定义并取决于给定零件形状的预期数据缩减率。如果需要大量减少点数据,网格的大小将会增加;反之,通过投影网格平面上的点,对应的每个网格的点被分组,并且这些点的正常值被平均。作为网格细分的标准,使用点正常值的标准偏差。考虑到部件形状和期望的点数据缩减比率,标准偏差的水平是预定的。如果网格中的标准偏差很大,则表示与网格相对应的零件几何形状是复杂的,因此需要进一步细分网格以便采样更多的点。如果网格的标准偏差大于给定值,则网格被细分为四个单元格。这个过程重复进行,直到网格的标准偏差小于给定值,或者网格尺寸达到用户指定的最小限度。与单向方法相比,这种双向方法提取更多点,从而更准确地表示零件的形状。
三、实验结果
提出了基于非均匀网格的点数据缩减方法,使用不同类型的零件表面进行了测试。在应用简化算法之前,从初始点云中去除异常值或峰值。
1.均匀网格到简单的表面
在讨论所提出的数据缩减方法的实验结果之前,使用均匀网格方法来显示由激光扫描仪获得的点云的中值滤波的有效性。表1中总结了原始点云均匀网格和均匀采样点的平滑度和点数。

表1 平滑度的比较
结果表明,使用中值滤波将z轴上的点云误差范围降至最小。
2.非均匀网格自由曲面
由于网格大小的灵活性,非均匀网格方法更有效地处理自由形状的物体,如较小的网格用于高度弯曲和细节的区域,较大的网格用于平面和接近平面的区域。为便于比较,其他数据简化方法也适用于同一模型,结果汇总在表2中。

表2 样品偏差汇总表(单位:mm)
随着缩减比的增加,缩减点数据组与原始模型的偏差更大,然而对于所有级别的减少,双向非均匀网格方法显示的偏差比其他方法更少。而且即使增加减少,考虑精确度和点数,确定最佳的数据缩减率取决于在零件形状上。虽然每个方法只有一个自由形式模型被测试,但是这个研究证明了非均匀网格方法在减少自由形状零件的点云数据方面的有效性。
四、结论
本文研究了用激光扫描仪采集点云数据的过程,随着扫描设备技术的提高,数据采集的速度可能会增加,这将必须自动增加点数据量的处理。从激光扫描中出现的零件形状和z轴误差的角度出发,提出并实现了采用单向或双向不均匀网格的数据压缩方法。将所提出的方法应用于具有自由形状的样本模型,并将结果与其他常规方法进行比较分析,所提出的方法证明了可以在保持点数据质量的同时有效地执行减少。
[1]B. L .Curless. “New Methods for Surface Reconstruction from Range Images”,PhD thesis[M].Stanford University,1997.
[2]Data Sculpt User’s Manual Version 4.0[Z].Laser Design,1995.
[3]A. D. Marshall and R. R. Martin. Computer Vision Models and Inspection[J].World Scientific,1993.
[4]B. Hamann and J. Chen. Data point selection for piecewise linear curve approximation[J].Computer Aided Geometric Design,1994(11): 289–301.
Simplified Methods for Data Processing in Reverse Engineering
XING Xin
(Chongqing Creation Vocational College, Chongqing 402160, China)
The project referred in this article is the reverse-created process which means to reconstruct its existing part by existing partial data through using scanning or measuring equipment[1]. 3D laser scanners have become more accurate and the speed of data acquisition has dramatically increased. However, there is a big problem that it generates thousands of points per second and handles large amount of data. Therefore, in order to reduce the number of points obtained and convert it to the format required by the production process, this paper proposes a method can effectively reduce the amount of point data while maintaining the accuracy.
reduced point data; reverse engineering; 3D laser scanner; uniform and non-uniform grid method.
TP391.7
A
1008—6129(2018)01—0097—05
2018—01—08
幸鑫(1991—),女,重庆人,重庆科创职业学院,助教。
猜你喜欢
小学生作文·小学低年级适用(2025年2期)2025-03-05 00:00:00
中学生天地(A版)(2022年11期)2022-11-25 07:43:16
科技风(2020年13期)2020-05-03 13:44:08
科学与财富(2019年3期)2019-02-28 07:33:42
科技创新导报(2019年24期)2019-01-14 02:41:55
新世纪智能(英语备考)(2018年11期)2018-12-29 10:56:52
湖北农业科学(2017年11期)2017-07-13 00:56:41
小学生学习指导(低年级)(2016年10期)2016-12-01 06:10:42
现代营销·经营版(2015年3期)2015-04-20 06:46:58
现代营销·经营版(2013年5期)2013-05-14 14:55:04