气动行程程序设计中几种消障方法的比较
2018-04-19 07:18:57袁瑞仙
邢台职业技术学院学报 2018年1期
杨 妙,袁瑞仙,孙 峰
气动行程程序设计中几种消障方法的比较
杨 妙,袁瑞仙,孙 峰
(长春汽车工业高等专科学校 电气工程学院,吉林 长春 130013)
气动行程程序设计是气压传动教学中的重要内容,其中如何消除障碍信号是教学中的重点和难点。现在主流的消障方法依然停留在采用脉冲信号和辅助阀上,随着新技术、新产品的出现,消障方法变得多样化。对比脉冲信号法、辅助阀法,以具体例子说明气动行程程序设计中出现Ⅰ型障碍采用串联法、气控延时阀以及气动节拍器进行消障的基本原理,并给出设计回路图。最后在总结各种消障方法优缺点的基础上提出消障方法的选择应综合考虑实际应用场合、使用要求以及经济成本的整体情况来选取。
气压系统;障碍信号;串联法;气控延时阀;气动节拍器
气压传动是以压缩气体为工作介质,靠气体的压力传递动力或信息的流体传动。纯气动系统在设计过程中采用行程程序控制居多。行程程序控制是指执行元件完成某一动作后,由行程开关发出相应信号,输入到逻辑控制回路中,由逻辑控制回路做出判断后再发出相应的执行信号,使执行元件执行下一步动作,当动作完成后,继续发出新的信号,直到完成预定的逻辑控制为止[1]。设计行程程序控制回路必须注意信号之间是否存在干扰,有些信号使执行元件执行某一个动作,却阻碍了执行元件的下一个动作,这就形成了障碍,在回路中必须消除障碍,程序才能正常运行[2]。目前,在程序设计中消除Ⅰ型障碍的方法主要有:脉冲信号法、辅助阀法、串联法、采用气控延时阀和气动节拍器。本文以一个实例为载体,说明采用以上5种方法消障的优缺点并进行总结。
一、压印装置实例
某压印装置如图1所示,该装置的功能是在零件上压印标签。图中气缸A将零件推至气缸B之下,由气缸B进行压印,压印完成后气缸B立刻退回;等待气缸B退回到起点气缸A才能退回。在实训台上气缸和行程阀的具体位置见图2所示。

图1 压印装置实例
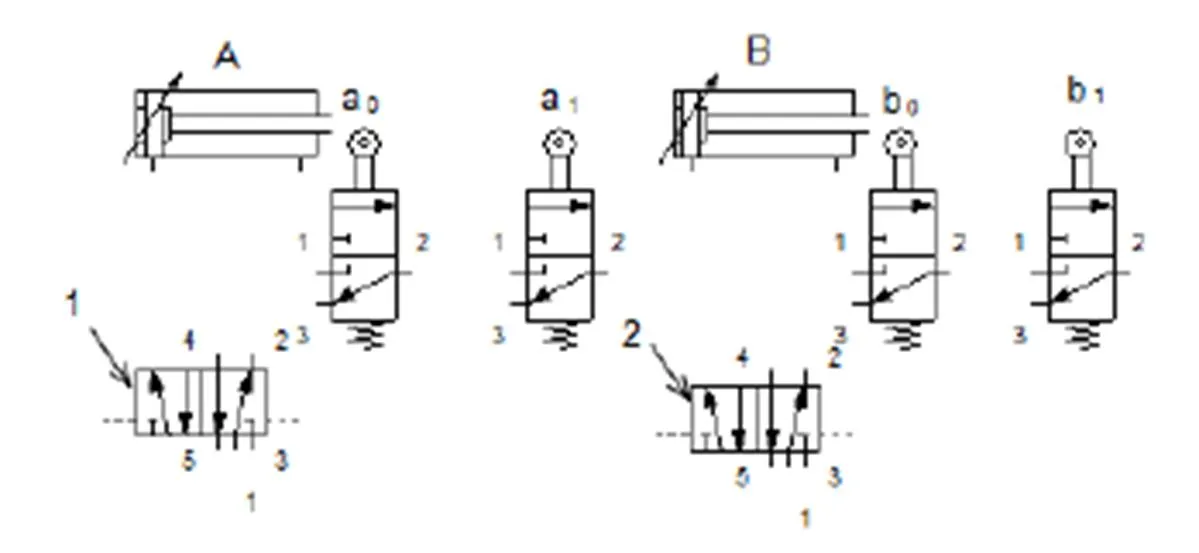
图2 实训台上气缸和行程阀位置
该实例的信号—动作线图如图3所示,信号a1、b0是I型障碍信号[3-4]。气缸A伸出到行程终点时压下行程阀a1的滚轮发出a1信号,该信号驱动气缸B的双气控二位五通换向阀(以下简称换向阀2)换向,气缸B伸出到达行程终点压下行程阀b1的滚轮发出b1信号驱动气缸B的换向阀2换向,此时因为气缸A一直保持伸出状态,其终点的行程阀a1保持导通状态,即使驱动气缸B的换向阀2再次换向的b1信号输入,换向阀2也无法正常换向,因此a1信号存在时间过长妨碍了气缸B的退回动作[5-6]。同理b0信号存在时间过长妨碍了气缸A的伸出动作。在程序设计中需要将a1、b0这两个障碍信号进行消障处理程序才能正常运行。消障的原理在于将长信号变成一个存在时间较短的短信号,在下一个换向信号出现时消失。
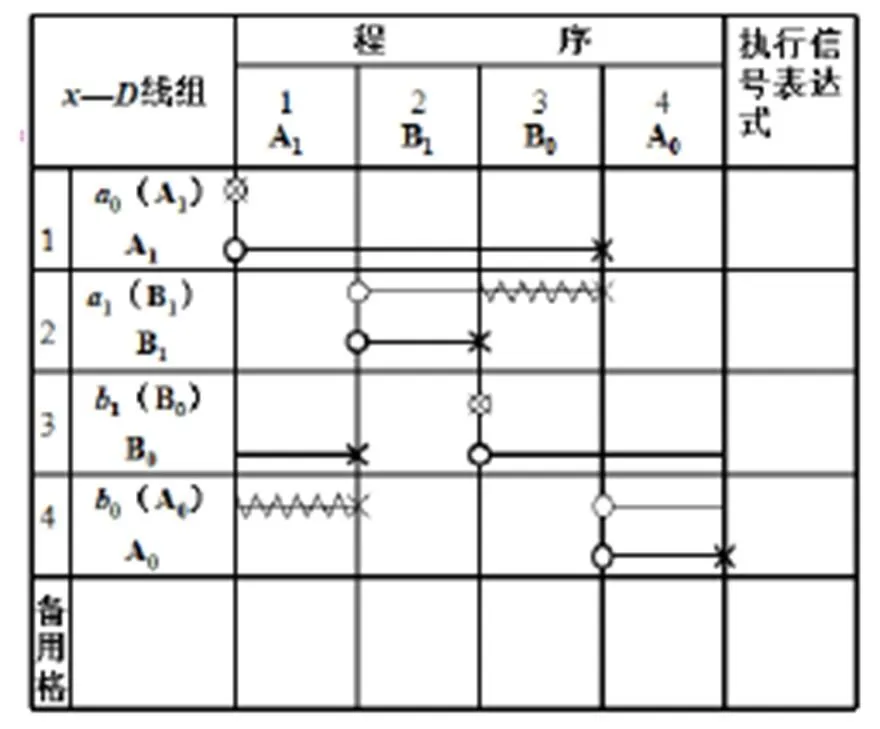
图3 信号—动作线图
二、五种消障方法的比较
(一)脉冲信号法(单向滚轮杠杆阀消障)
脉冲信号法是用图4所示的单向滚轮杠杆阀替换图2中的行程阀(滚轮杠杆阀),当滚轮被气缸的活塞杆沿指定方向驱动时,单向滚轮杠杆阀才能够切换至导通状态。释放滚轮后,单向滚轮杠杆阀在复位弹簧作用下复位。当沿相反方向驱动滚轮时,单向滚轮杠杆阀并不动作,利用单向滚轮杠杆阀单向发信号的特性将障碍信号变成单向脉冲信号。活塞杆前进时压下单向滚轮杠杆阀发出脉冲信号,活塞杆返回时单向滚轮杠杆阀头部具有可折型,没有信号发出。图5是用仿真软件FluidSIM绘制的回路设计图[7]。
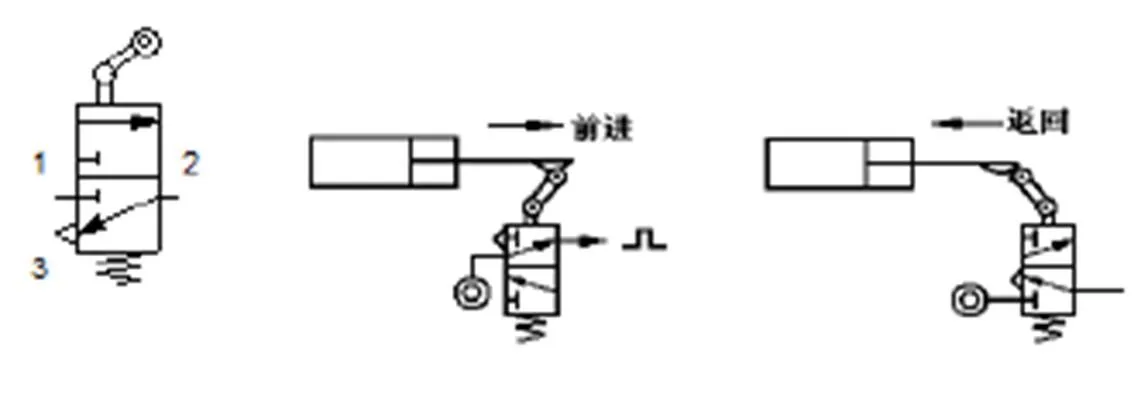
图4 单向滚轮杠杆阀消障原理
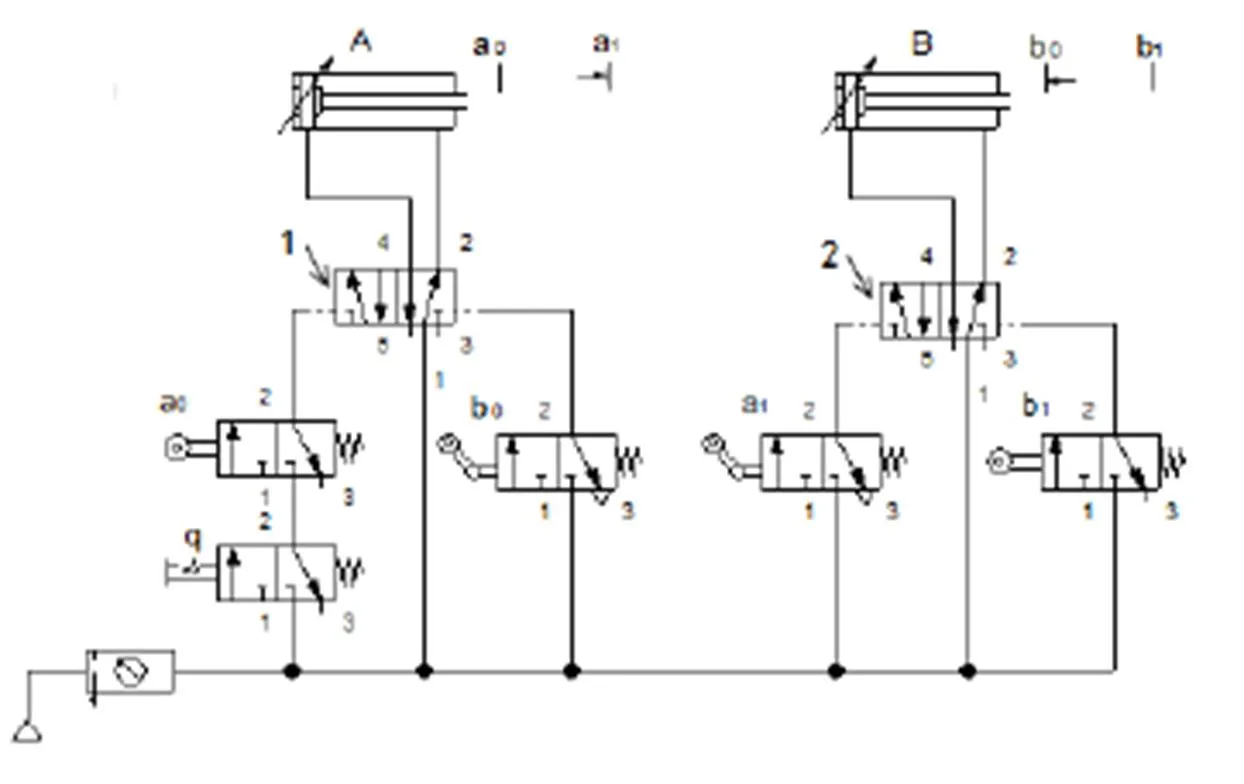
图5 采用单向滚轮杠杆阀消障的回路设计图
脉冲信号法排障简单易行,可节省气动元件及管路,缺点是单向滚轮杠杆阀应布置在行程起点与终点靠行程里侧的位置,定位精度不高。对于定位精度要求高的场合不推荐使用。
(二)辅助阀法
辅助阀法是在回路中增加一个辅助阀作为中间记忆元件,用辅助阀的输出信号作为制约信号和障碍信号相“与”,控制障碍信号的存在时长[8]。
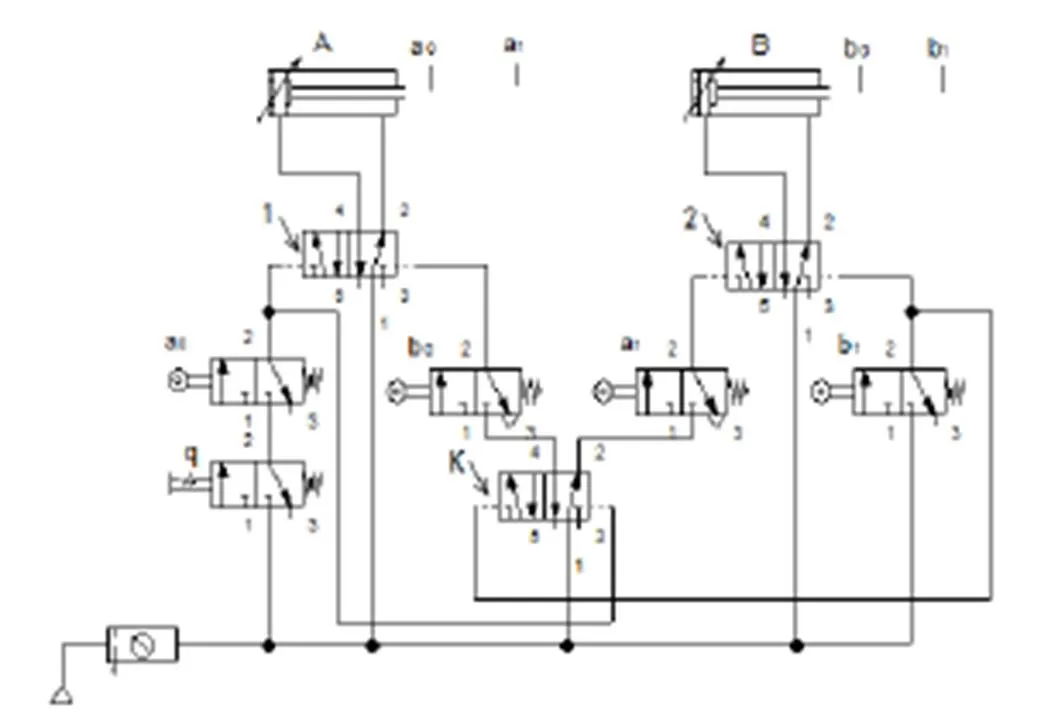
图6 辅助阀法消障的回路设计
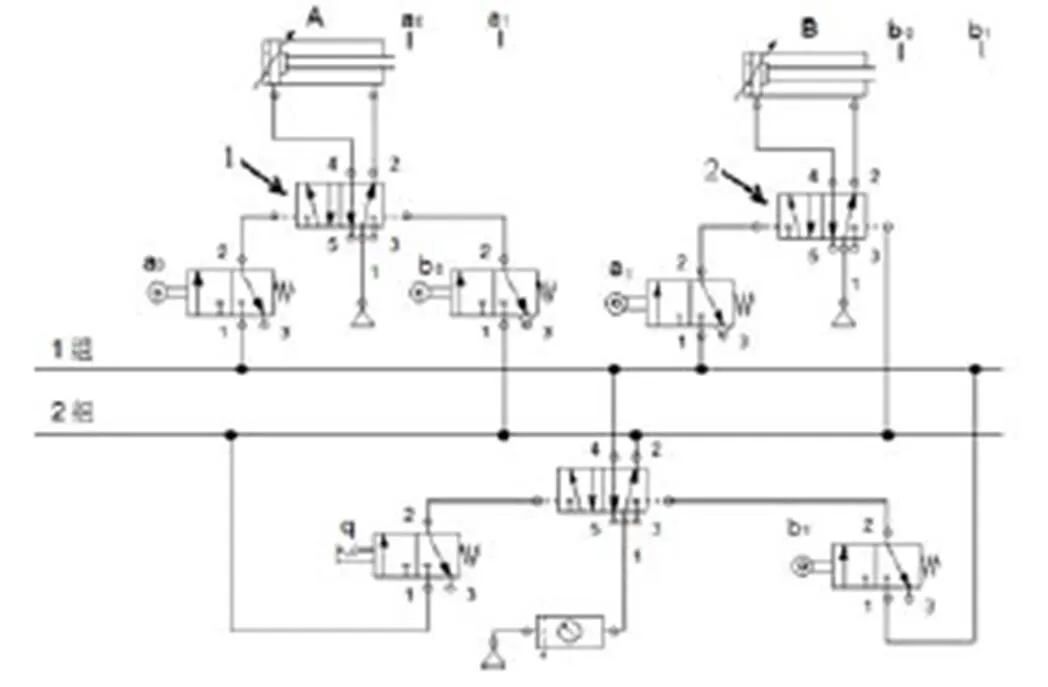
图7 串联法消障的回路设计
图6是采用辅助阀消障的回路设计图,双气控二位五通换向阀K为辅助阀(以下简称为阀K)。气缸A在起点位置,行程阀a0处于导通状态,当按下启动开关阀q时,压缩空气进入气缸A的双气控二位五通换向阀1(以下简称为换向阀1)驱动其换向,同时压缩空气进入阀K的右侧,接通气源与阀a1。当气缸A伸出时阀a0从导通状态切换为截止状态,气缸A伸出到终点位置阀a1导通,压缩空气进入气缸B换向阀2左端驱动其换向,气缸B伸出,伸出到终点位置压下阀b1的滚轮使其导通,阀b12口的压缩空气分成两路,一路驱动阀K换向断开气源与阀a1,一路驱动气缸B换向阀2换向,因为前一路断开了气源与阀a1,因此即使气缸A保持在伸出状态阀a1也没有压缩空气输出,故而气缸B的换向阀2能够正常换向。阀a1的障碍信号a1通过辅助阀K变成了无障碍信号。障碍信号b0的排除原理与障碍信号a1相同。
辅助阀法消障不必改变行程阀的位置,采用中间记忆元件制约障碍信号,排障可靠,缺点在于增加了一个元件,使得回路变得复杂。
(三)串联法
串联法是确定气缸动作顺序后,根据一组内同一气缸只能出现一次的分组原则将气缸动作分成若干组,每一组的气缸采用一条供气线路,每一组动作完成后由该组最后一个信号作为换组信号将供气线路进行切换,确保了每一组的信号只在该组内存在,切换供气线路后,障碍信号与气源连接断开,长信号变成短信号。本例中气缸的动作顺序为A1B1B0A0,根据分组原则可以分成两组,第一组为A1B1,第二组为B0A0,信号b1为换组信号。
图7是采用串联法的回路设计。气缸B伸出压下阀b1的滚轮,系统供气从1组切换到2组之后,产生障碍信号a1的阀a1与气源断开,此时即使气缸A在行程终点压下阀a1的滚轮使阀a1处于导通状态,也没有压缩气作用在气缸B换向阀2上,因此只要出现b1信号,气缸B换向阀2就正常换向,气缸B退回。
串联法是设计回路时利用分组将障碍信号与气源切断从而将长信号变为短信号。应用串联法进回路设计消障可靠,但缺点是回路分组增加了回路的复杂性,并且分组越多回路越复杂。因此,多气缸回路中串联法并不是值得推荐的好方法。
(四)采用气控延时阀消障
气控延时阀有延时接通和延时切断两种,本例中采用气控延时阀(延时切断)使长信号变成短信号。气控延时阀结构见图8所示,它是一个组合阀,由单气控二位三通换向阀、可调单向节流阀和气室组成。当控制口10上的压力达到设定值时,单气控二位三通换向阀动作,进气口1与工作口2关闭。延时切断的时间可通过调节延时阀上的节流阀来实现。图9是采用气控延时阀消障的回路图,在障碍信号a1和b0之后设置气控延时阀4和5,当气缸A伸出压下阀a1的滚轮发出信号a1驱动气缸B换向阀2换向,气缸B伸出过程中气控阀延时阀5切断信号a1,等待气缸B运动至行程压下阀b1的滚轮给出信号b1,换向阀2正常换向气缸B退回。
采用气控延时阀是在不增加回路复杂性的前提下达到控制障碍信号的存在时间来消障,此方法简单可靠。通过增大气室,可使延时时间加长。缺点是延时时间不精确,为了提高延时精度,对压缩空气的洁净程度和稳定性要求较高。
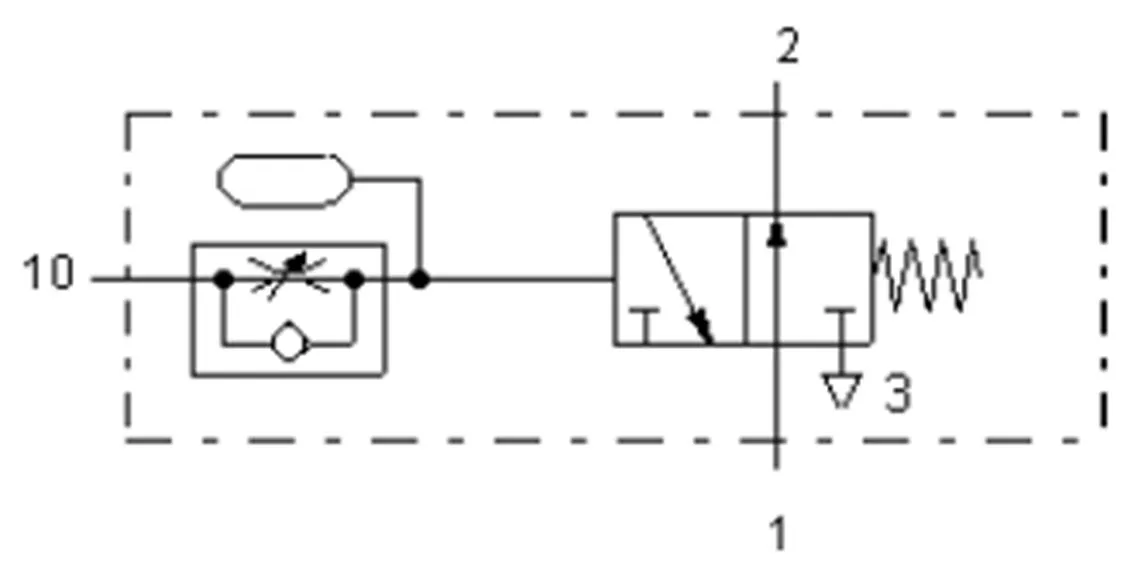
图8 气控延时阀(延时切断)

图9 采用气控延时阀消障的回路设计
(五)采用气动节拍器
气动节拍器是一种自动控制的气动元件,能使气动回路设计变得容易。它能防止信号的意外发出。每一个节拍均被分配有一个节拍储存器。节拍储存器为相应的节拍下达执行命令,也通过相应节拍的执行器接收回答信号[9]。图10是气动节拍器的构造示意图,A1、A2、A3、A4是气控信信号的输出口,X1、X2、X3、X4是气控信信号的输入口,P是进气口。
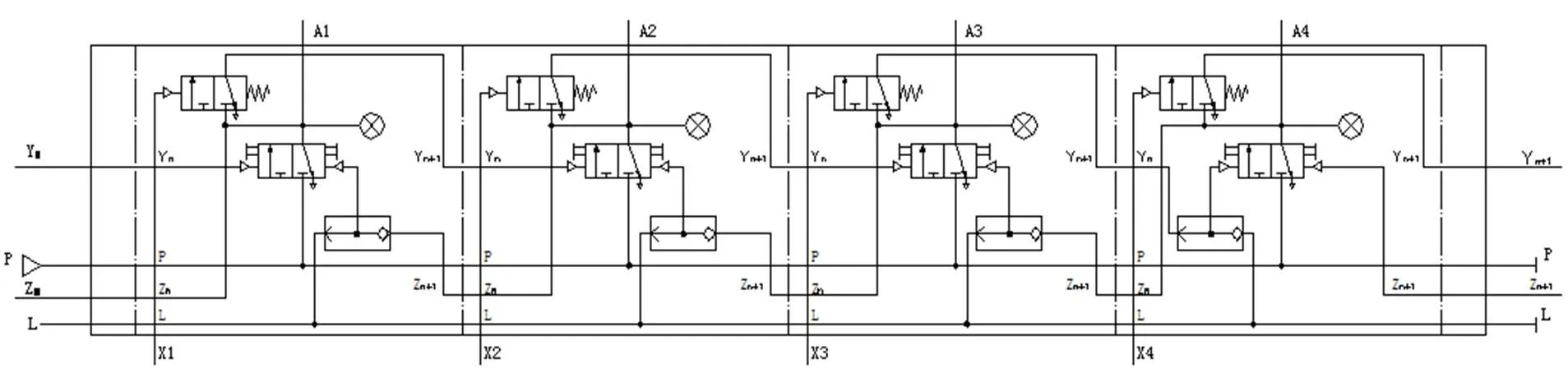
图10 气动节拍器的内部构造
图11是采用气动节拍器消障的回路设计图。按下启动按钮q,A1输出口有气信号输出驱动气缸A伸出,气缸A伸出到行程终点压下a1阀给出a1信号,A2输出口有气信号输出驱动气缸B伸出,气缸B伸出到行程终点压下b1阀给出b1信号,A3输出口有气信号输出驱动气缸B退回,气缸B退后到行程起点终点压下b0阀给出b0信号,A4输出口有气信号输出驱动气缸A退回。障碍信号a1驱动气缸A伸出,依靠节拍器特有的逻辑控制回路在出现b1信号时切断A2输出口的输出,因此即使障碍信号a1存在也不影响气缸B的退回动作。同理,障碍信号b0的存在不会影响气缸A的伸出动作。
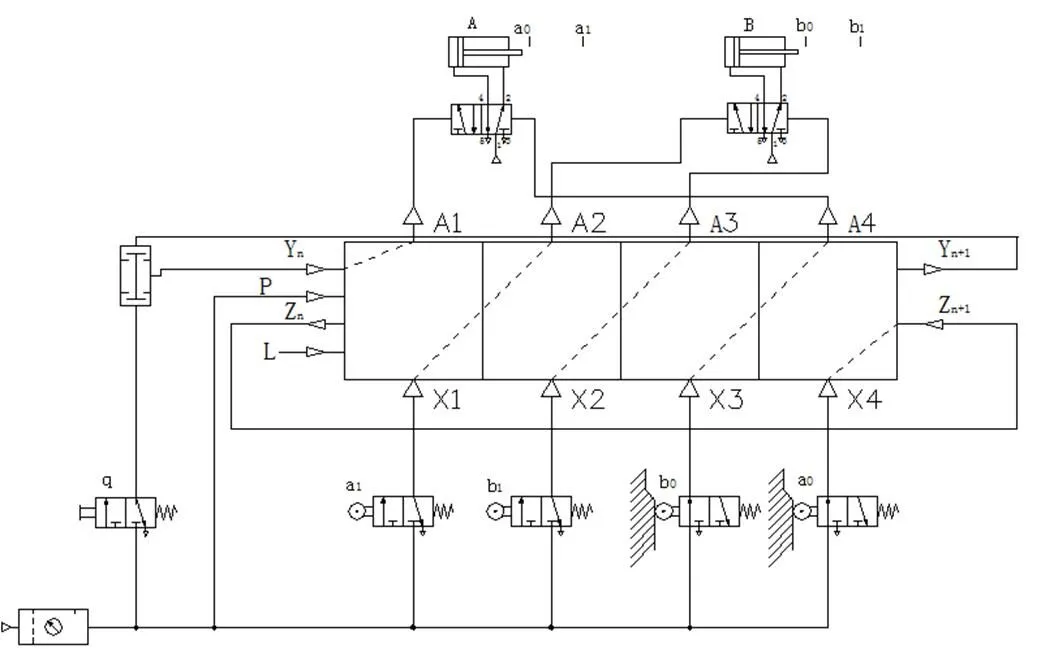
图11 采用气动节拍器消障的回路设计
采用气动节拍器可自动消除障碍信号,保证上一步顺序动作已经完成并检测到以后,下一个顺序动作才能开始。它可以根据输入、输出信号顺序方便地调节程序的动作顺序,使用方便安全可靠,广泛应用在多个气缸按一定工作顺序依次完成多个执行动作的场合[10]。因为气动节拍器是一种集成化、模块化、智能化的元件,因此采用气动节拍器消障需要考虑成本问题。
三、结论
本文详细阐述了脉冲信号法、辅助阀法、串联法、采用气控延时阀和气动节拍器在两缸气动行程程序设计中的消障原理与回路设计。气动行程程序设计消障可根据实际需求采用不同的方法来实现,选择时应综合考虑实际应用场合、使用要求以及经济成本的整体情况来选取。在教学过程中可根据学生的接受程度进行选择,让学生在了解消障原理与基本方法的同时,领悟到不同方法解决同一问题的优缺点并进行比较,最终选择适合于实际问题的解决方法,提升处理问题的能力。
[1][2][3]马振福.液压与气压传动[M].北京:机械工业出版社,2016.
[4][5][10]马晓明.基于X-D线图的多缸多往复气动回路设计[J].制造技术与机床:2011(5):75-78.
[6]胡伟,董海军,黄桂芸.纯气动系统中的多执行元件顺序动作功能设计[J].液压与气动:2014(06):111-113.
[7]毕长飞.FluidSIM 3.6仿真软件在《液压与气动技术》中的应用[J].液压与气动,2011(08):111-114.
[9]毛智勇.气动节拍器——新型自动控制气动元件[J].液压与气动,2005(09):67-69.
Comparison among Different Methods of Removing Obstacles in Designing Pneumatic Controlling Program
YANG Miao,YUAN Rui-xian,SUN Feng
(Changchun Automobile Industry Institute, Jilin, Changchun 130000, China)
The design of pneumatic controlling program is an important content of the pneumatic transmission teaching, and the difficulties of teaching is how to remove obstacles signals. The mainstream ways to remove obstacles are still pulse signal and auxiliary valve. With the emergence of new technology and new products, the ways to remove obstacles become diversified. Compared with the pulse signal and auxiliary valve, this paper expands the basic principles of designing pneumatic controlling program with specific examples: series process is used against the I-type obstacle, and time delay valve based on pneumatic control and pneumatic stepper are used against obstacles. It shows the design circuit diagram and finally summarizes the advantages and disadvantages of various ways to remove obstacles and puts forward that the removing ways should be selected by combining with the practical application places, requirements and the costs.
pneumatic system; obstacle signal; series process; time delay valve based on pneumatic control; pneumatic stepper
TH138
A
1008—6129(2018)01—0088—05
2017—12—12
杨妙(1984—),女,陕西咸阳人,长春汽车工业高等专科学校电气工程学院,讲师。
猜你喜欢
水电站机电技术(2024年2期)2024-02-28 06:55:08
艺术启蒙(2023年12期)2023-03-11 09:54:02
新少年(2022年3期)2022-03-21 13:28:39
数学小灵通(1-2年级)(2021年5期)2021-07-21 03:08:10
冰雪运动(2019年2期)2019-09-02 01:41:22
阅读(中年级)(2016年11期)2017-01-23 12:12:29
电子制作(2016年19期)2016-08-24 07:49:48
现代制造技术与装备(2015年4期)2015-12-23 10:20:22
发明与创新(2015年26期)2015-02-27 10:39:35
护理研究(2014年2期)2014-12-04 03:49:06