
石墨烯纳米复合材料光驱动技术的研究进展
2018-04-18 08:25,,,
材料工程 2018年4期
,,,
(西安交通大学 机械工程学院,西安 710049)
一直以来,利用外部激励改变自身物理性质的材料制作驱动器[1],受到研究人员的持续关注。根据供能方式不同,驱动材料被划分在电[2]、热[3-4]、气[5]和光[6]等驱动机理中,并广泛应用在微型机器人、人工肌肉、智能开关、微机械和微流体设备等领域[7]。其中,电驱动材料,如介电弹性体和导电聚合物,被广泛应用在一系列前沿科技中[8],然而它存在驱动电压高、装置中有电线等缺陷。相比其他激励驱动技术,光驱动可将光照转换为机械变形,具有无线驱动、远程控制、低噪声等诸多优点[9-13]。特别是,因质量轻、加工性能好、低成本、具有类似人工肌肉的高效性,以聚合物为基础的光驱动材料目前受到了研究人员的广泛重视,并取得一定的研究进展。而且,光驱动的聚合物驱动器在医疗设备、防爆驱动、光学、微纳机械等领域展现出良好的应用前景[7]。
目前,光驱动聚合物驱动器中的聚合物材料分为两种:纯聚合物[14-15]和聚合物复合材料[7,16]。两种聚合物材料均需有光敏基团或填料充当“分子开关”或“能量传递”单元。纯聚合物光驱动器虽然有较高的能量密度,但力学性能和响应时间不佳[14];聚合物复合材料光驱动器则因纳米填料与聚合物之间的相互协同作用,具有更加优越的力学性能和更为突出的热稳定性。目前光驱动的研究主要集中在近红外(Near-Infrared,NIR)光波段,但很多聚合物本身是近红外透明的,并没有近红外驱动性[17]。近年来,研究人员借助碳纳米管(Carbon Nanotubes,CNTs)出色的电、热、力学和光学性能,研发了基于CNTs聚合物复合材料的光驱动技术。虽展现出远程、快速和高能量的近红外驱动性及较高的力学性能[18],但由于CNTs的自身结构、催化剂和无定形碳导致的固有不纯性、不易分散性和高生产成本,使其难以得到进一步的实际应用。
石墨烯因独特的二维单层碳原子结构,具有超越单壁碳纳米管[19]和多壁碳纳米管[20]的固有特性,成为材料领域中的新兴材料。将石墨烯材料自身特性与聚合物的性质相结合,彼此协同作用[21],研制具有优秀性能的基于石墨烯复合材料的红外光驱动器,逐渐成为研究的热点并取得了良好的进展[22]。本文对石墨烯材料在光驱动应用中的相关性质进行了介绍,主要评述了基于石墨烯纳米复合材料的红外光驱动技术的最新进展,展望了石墨烯纳米复合材料光驱动技术今后的研究热点及应用前景。
1 石墨烯材料的性能与制备
石墨烯是以sp2杂化连接的蜂巢状单层碳原子结构,如图1(a)所示[23]。它被认为是富勒烯、碳纳米管、石墨的基本结构单元[24],单层石墨烯的厚度仅为0.4~1nm。2004年,英国曼彻斯特大学的Geim和Novoselov第一次使用胶带剥离得到稳定存在的石墨烯[25]。这种简单的机械剥离法可以获得质量较高的石墨烯,却不便于石墨烯的规模化制备。为获得高质量、可产业化的石墨烯,最常用的制备方法是外延生长法[26]、氧化还原法[27]和化学气相沉积法(CVD)[28-29]。
石墨烯因独特的二维结构,具有优异的物理、化学性质[30-32],使它非常适合用来制备红外光驱动器中的聚合物复合材料。石墨烯只有一个原子的厚度,但它具有很高的机械强度。原始状态下,杨氏模量E=1.0TPa,机械强度为 130GPa[33]。这种优异的性能使石墨烯能够加强柔性材料的力学性能,成为聚合物纳米复合材料的优秀填料。与同为聚合物填料的CNTs相比,石墨烯的高比表面积促进了其片层与聚合物间的协同作用,可极大地提高聚合物的热力学性能。准确地说,因单层石墨烯的每个原子都暴露在环境中,石墨烯的比表面积高达2630m2·g-1[33-36]。这为石墨烯材料的化学功能化以及与纳米材料的复合提供了很好的基础[23]。石墨烯具有显著高于CNTs和金刚石等其他碳材料的热传导率,约为3000~5000W·m-1·K-1[37-38]。特别是,石墨烯的热膨胀系数为负值,即加热时石墨烯发生收缩变形[39-40]。
由于电子耦合或片层边缘氧分子引起的不对称拉伸,石墨烯材料有一定的红外光吸收带,这为基于石墨烯复合材料的光驱动技术发展提供了可能[41-42]。目前,基于石墨烯复合材料的红外光驱动器中,石墨烯材料作填料的主要形式除石墨烯外,还有氧化石墨烯(Graphene Oxide,GO)和还原氧化石墨烯(reduced Graphene Oxide,rGO),如图1(b),(c)所示[23]。

图1 基本结构图[23] (a)石墨烯;(b)氧化石墨烯;(c)还原氧化石墨烯Fig.1 Basal structure diagram[23] (a)graphene;(b)GO;(c)rGO
因成本较低,石墨烯复合材料中使用最多的石墨烯材料是GO。GO 是石墨烯的氧化形式,层间有大量的含氧官能团(羧基,羟基,环氧基等),如图1(b)所示。GO是氧化还原法中由石墨制备石墨烯纳米材料的中间产物,通过石墨的氧化反应和超声破碎法[43]连续剥离得到。不同于原始的石墨烯,GO的物理、化学性质已经发生了改变,如表1所示[26-28,44]。其中,较高的碳结构缺陷密度降低了石墨烯的力学性能和热传导性能。而含氧官能团的存在则使GO在水相条件中保持稳定,成为亲水材料。由于高比表面积和较多的官能团,亲水性促进了GO片层的化学功能化[45]。因此,GO成为制备具有光机械效应复合材料的重要一员[46-49]。
rGO通常由GO通过化学还原剂、热处理、光还原、微波还原等方法得到,这也是通过氧化还原法最终得到转化石墨烯的过程[50]。相比其他制备石墨烯的方法,氧化还原法成本低、效率高,是大量获取石墨烯的最佳途径之一。尽管rGO中已经移除了GO中的大部分官能团,C∶O比也增加到246∶1(见表1),但rGO仍未实现完全还原[51]。GO的还原过程中,存在晶格缺陷并残留含氧官能团,因此rGO只保留了部分原始石墨烯的力学性能和热传导性[37]。另外,有研究人员通过控制还原过程得到具有特定残留含氧官能团的rGO,来制备石墨烯复合材料[52-54]。

表1 近红外光驱动应用中石墨烯纳米材料的主要性能[26-28,44]Table 1 Main properties of graphene-based nanomaterials relevant for NIR-driven applications[26-28,44]
石墨烯、GO和rGO等石墨烯材料与聚合物复合后,材料纳米结构发生变化,复合材料的热传导性能改善极为显著,如表2所示。制备后的石墨烯复合材料的力学性能和光力学性能也有了显著提高[59-60],这为光驱动技术中光机械转换效率的提高等提供了研究空间。

表2 石墨烯复合材料的热传导性能Table 2 Thermal conductivity in graphene-based composites
2 基于石墨烯材料的近红外光驱动器
目前,与石墨烯材料复合并可以将其光机械效应[61-63]用于光驱动的材料大致可分为石墨烯基大分子复合材料和石墨烯磺化物复合材料。
2.1 基于石墨烯基大分子复合材料的近红外光驱动器
自2006年Ruoff等[52]成功制备了聚苯乙烯-石墨烯复合材料后,对于基于石墨烯基大分子复合材料的研究越来越多,尤其是它在光驱动技术中的应用。基于石墨烯基大分子复合材料的红外光驱动器主要是依靠石墨烯填料的光热效应带来的复合材料的机械变形实现驱动[22,53,55]。根据驱动材料结构的不同,可分为单层薄膜驱动和双层薄膜驱动。
2.1.1 单层薄膜驱动
红外光驱动器的单层薄膜驱动主要是利用石墨烯基大分子复合材料的力学性能等多方面性质的提高,产生较大的光机械效应来完成。其中,复合材料性能的提高,主要依赖填料石墨烯材料优异的热传导性[56]和聚合物自身特性之间的相互协同作用。
2011年,美国威斯康辛大学的Lo等[53]采用一种新型光敏聚合物聚N-异丙基丙烯酰胺(Poly (N-isopropylacrylamide),PNIPAM)来替代甲基丙烯酸缩水甘油基酯功能化石墨烯氧化物(Glycidyl Methacrylate Functionalized Graphene Oxide,GO-GMA)中的金属纳米颗粒填料,制备了GO-GMA水凝胶复合材料。实验表明,该GO-GMA复合材料的保水性比金属做填料时提高近3倍,并具有很高的光热转换效率。利用该复合材料制备的微流道在近红外照射下有明显体积变化,如图2所示。不过,其具体光驱动机制还有待研究。
Loomis等[57]制备出一种具有红外光机械效应的石墨烯纳米片/聚二甲基硅氧烷(Graphene Nanoplatelet/ Polydimethylsiloxane,GNP/PDMS)复合材料,并对该GNP/PDMS复合材料的弹性响应进行了研究。通过对不同GNP质量分数的复合材料进行预拉伸后,发现其红外光响应速率主要依赖于预拉伸力的大小。随后,该团队[58]将单层石墨烯(Single Layer Graphene,SLG)分散到PDMS中制备复合材料,并与GNP/PDMS复合材料进行对比研究。其中,复合材料的测力装置便是一个光驱动装置,如图3所示。实验结果表明,SLG/PDMS和GNP/PDMS复合材料中,光机械转换效率与石墨烯质量分数均为正线性相关。

图2 利用GO-GMA制备的红外光驱动微流道[53] (a)红外照射前;(b)红外照射后Fig.2 Microvalve made of GO-GMA IR-responsive hydrogel[53] (a)before IR;(b)after IR
而在相同的石墨烯质量分数和近红外强度下,石墨烯层数每增加一层,其应力响应便减少20%,光机械转换效率减小30%。可见,光驱动复合材料中分散的石墨烯层数是一个重要影响因素。但相比,GNP/PDMS复合材料与微机电系统(Micro Electro Mechanical Systems,MEMS)光刻过程有更好的相容性,加工成本也更低[9]。2013年,Loomis团队[9]通过对GNP/PDMS的预拉伸,探索了该复合材料的光机械效应。研究表明,在低预拉伸(3%~9%)或高预拉伸(15%~40%)下,GNP/PDMS复合材料在红外光驱动下分别可逆地膨胀或可逆地收缩。该复合材料光机械效应引起的应力比原始PDMS聚合物提高了4个数量级。利用该复合材料研制的近红外光驱动的单轴定位器,如图4所示。其单轴定位精度较高,可达100μm,然而最大的光机械转换效率仅为0.03%。
2011年,斯坦福大学的Robinson等[64]第一次以rGO的形式与非共价的聚乙二醇(Polyethylene Glycol,PEG)键合形成nano-rGO。相比CNTs,该复合材料具有更高效率的近红外光的光热吸收性。2013年,美国加利福尼亚大学的Wang等[22]对rGO纳米片和弹性蛋白式多肽(Elastin Peptides,ELPs)进行组合,制备了具有近红外光机械效应的ELPs-rGO复合材料,并设计了可实现近红外光驱动弯曲和爬行的仿生手和仿生虫,如图5所示。研究表明,因采用气相扩散法制备引入了孔隙度,复合材料在近红外光移除后的10s内便可恢复原有形状的74%~84%。该复合材料光驱动响应速率快,但可重复驱动性不好。

图3 复合材料的测力装置示意图[58]Fig.3 Schematic illustration of test dynamometer for composites[58]

图4 GNP/PDMS复合材料光驱动器[9] (a)GNP/PDMS复合材料光驱动下提升重物图;(b)单轴定位器Fig.4 GNP/PDMS light-driven actuator[9] (a)light-driven GNP/PDMS lifting mass;(b)simplified single-axis nanopositioner layout

图5 水凝胶执行器的控制运动[22] (a)仿生手NIR照射下弯曲或不弯曲状态图;(b)圆形复合水凝胶的折叠;(c)仿生虫原理图Fig.5 Controlled motion of hydrogel actuators[22] (a)images of the fingers of a hand-shaped hydrogel bending and unbending in response to the location of a NIR laser spot;(b)images of folding of a circular composite hydrogel;(c)images of a light-driven crawler
2014年,韩国建国大学的Dong等[59]制备了薄壁碳纳米管/还原氧化石墨烯/超支化聚氨酯(Thin-walled Carbon Nanotube/Reduced Graphene Oxide/Hyperbranched Polyurethane,TWNT/RGO/HBPU)复合材料,并对各组分间的协同效应进行了研究。其中, TWNT和RGO分别用来吸收近红外光和提高复合材料力学性能,如图6所示。研究表明,TWNT和RGO在复合材料中良好的分散性以及碳纳米管和石墨烯之间的三维增强互连,使得复合材料的光驱动恢复性能明显好于纯TWNT复合材料和纯RGO复合材料。其中,TWNT和RGO所占质量分数为1%、TWNT与RGO之比为7∶3时,其光驱动形状恢复性能最佳,即该复合材料在近红外光移除后的10s内恢复为原形状的83.77%。

图6 TWNT/RGO/HBPU复合材料的光驱动示意图(a)、弯曲(b)及拉伸状态下(c)NIR驱动TWNT/RGO/HBPU形状恢复[59] Fig.6 Diagrams of laser-induced actuation for TWNT/RGO/HBPU composite(a),the photothermal shape recovery actuation behavior in a bending(b) and an extension(c) mode for the TWNT/RGO/HBPU during the NIR irradiation[59]
四川大学的Shi等[65]成功制备了一种PNIPAM-GO复合材料,并利用该材料的光机械效应设计了一种近红外光远程控制电路开关。由于结合了小分子的化学交联和GO纳米片的物理交联,该复合水凝胶材料具有超高弹性。此外,PNIPAM-GO复合材料在近红外光驱动下响应快速、可重复驱动性良好。但该复合材料所获取的驱动力有限,并且对特殊各向异性基板具有依赖性,很难应用于人工肌肉等领域。
Lashgari[66]在研究GNPs对聚左旋乳酸(Poly(L-Lactic Acid),PLLA)形状记忆性能影响的同时,探索了PLLA/GNPs复合材料近红外光驱动的可能性。通过差示扫描量热法和X射线衍射法测得,GNPs质量分数较小时,PLLA/GNPs复合材料的热驱动和近红外驱动的形状记忆性能较好,如图7所示。该复合材料的形状恢复率由纯PLLA时的86%增加到95%,较之前有很大的提高。然而,当GNPs质量分数增大时,GNPs分散性不足,复合材料性能的提高受限。

图7 PLLA及其复合材料在近红外光驱动下的温度分布图和变形[66]Fig.7 Temperature distribution and deformation of pure PLLA and its nanocomposites during infrared actuation recovery[66]
2.1.2 双层薄膜驱动
双层薄膜驱动的红外光驱动器通常由基于石墨烯基大分子复合材料薄膜和聚合物薄膜两层薄膜构成。因薄膜间不同的杨氏模量和热传导系数,当近红外光照射时,基于石墨烯基大分子复合材料构成的薄膜与另一层聚合物薄膜之间产生一定温度差。双层膜之间为各向异性的变形,这种不对称的热机械反应引起双层薄膜的弯曲运动[67-68]。因石墨烯材料的负热膨胀系数,通常弯向含有石墨烯复合材料的薄膜一侧[69]。很多复杂的运动,如行走、旋转、模仿手部动作和振动,可通过对双层薄膜的合理设计实现[49,70-71]。
Wu等[72]研究出一种具有近红外光机械效应和良好柔软度的石墨烯-壳聚糖(Graphene-Chitosan)复合材料,并通过与聚乙烯(Poly Ethylene,PE)构成双层薄膜结构,设计了一种微型机器人和步行蠕虫,如图8所示。其中,步行蠕虫行走稳定,行走速率可达3.8mm·min-1。该研究突破传统技术限制,实现可远程控制的透明柔性光驱动器的制备,为透明机器人和微纳米机械的3D制造提供了一种新方法。研究表明,近红外光驱动下,该复合材料响应迅速,驱动的可重复性很好(超过1000次),寿命较长。但石墨烯的质量分数及石墨烯层数对复合材料的光驱动效率影响尚不明确。

图8 微型机器人抓取-释放过程图(a)及步行蠕虫行走运动图(b)[72]Fig.8 Gripping-releasing process diagrams of microrobot(a)and the walking motion of walking worm(b)[72]
2011年,吉林大学的Ma等[73]报道了一种对湿度敏感的弯曲/非弯曲双层步行装置。该步行装置的双层膜由聚丙烯酸/聚烯丙基胺盐酸盐(Poly(acrylic acid)/Poly(allylamine hydrochloride),PAA/PAH)和紫外光固化光学胶-63(Norland Optical Adhesive-63,NOA-63)构成,如图9(a)所示。分析表明,PAA/PAH具有较高的杨氏模量和湿度膨胀因子。失水的步行装置在吸水后27s内恢复原状,可重复驱动性好并且没有任何疲劳性。然而,作为激励,装置周围的湿度很难精确控制。Ji等[69]利用多巴胺-还原氧化石墨烯(Polydopamine-modified Reduced GO,PDA-RGO)和NOA-63制作了结构相同的双层步行装置,如图9(b)所示。利用PDA的亲水性和RGO的光热效应,实现步行装置湿度响应到近红外响应的转换。近红外光照射2.4s,该步行装置达到最大弯曲状态;近红外光关闭3.8s后,恢复原状。该复合材料具有高响应速率,但其受周围环境湿度的影响明显。
华南理工大学的Zhang等[74]通过将氧化石墨烯-锂蒙脱石黏土-聚N-异丙基丙烯酰胺(Graphene Oxide-hectorite clay-poly(N-isopropylacrylamide),GO-PNIPAmNC)凝胶层堆积到PNIPAmNC凝胶层上,研制出一种新型的双层凝胶光驱动器。近红外光照射60s后,该双层凝胶光驱动器发生弯曲并开始提起重物;照射110s后,重物被提升21mm。借助凝胶的自支撑力,该弯曲运动可以在空气中实现。但该复合材料响应速率缓慢,凝胶的固有失水性未明显改善,可重复操作性较低。
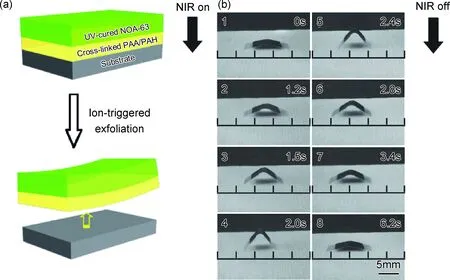
图9 (PAA/PAH)/NOA-63双层膜结构图(a)[73]及步行装置运动分解图(b)[69]Fig.9 Schematic illustration of (PAA/PAH)/NOA-63 bilayer film(a)[73] and kinematic diagrams of the walking device(b)[69]
西安交通大学的Jiang等[7]利用Loomis团队研制的GNPs/PDMS薄膜和PDMS薄膜构造双层薄膜,并设计了一种近红外光驱动的人造仿生鱼,如图10所示。研究表明,与类似CNT微驱动器近20s的响应时间相比,该仿生鱼有更短的响应时间(3.4s),而且有很好的可逆性和重复性。然而,该装置对液体(比如水)环境有一定的依赖性。

图10 微型鱼在水中运动图(a)及仿生鱼模仿鱼游动图(b)[7]Fig.10 Illustration of microfish moving in water(a) and an artificial microfish to mimic fish swimming(b)[7]
苏州纳米研究所的Hu等[10]成功制备了初始状态为卷轴状的氧化石墨烯-碳纳米管/聚二甲基硅氧烷(Reduced Graphene Oxide-Carbon Nanotubes/Poly(dimethylsiloxane),RGO-CNT/PDMS)复合材料,并进行了相应的实验。结果表明,该双层薄膜日光照射3.6s便可以实现479°的弯曲变形,具有较快的响应速率和较大的驱动变形。此外,通过设计结构,双层薄膜可实现光驱动器的多种运动输出。该复合材料的力学性能良好,但成本较高。
东华大学的Wang等[75]利用简便的抽滤方法将GO及氧化石墨烯-聚多巴胺(GO-Polydopamine,GO-PDA)纳米片组装成微米厚的石墨烯纸。在近红外光作用下,该石墨烯纸通过GO层对水分子的吸附与脱附来驱动变形,可以迅速(3s以内)折叠成预设的形状。在光热刺激下,由该石墨烯纸制成的仿生手还可实现物体的抓取,且具有较好的力学性能和响应速率。但该石墨烯纸对微弱的环境变化非常敏感。
2.2 基于石墨烯磺化物复合材料的近红外光驱动器
一些有关其他种类的石墨烯纳米复合材料的近红外光驱动器也有少量的研究报道。为保证石墨烯材料sp2碳结构的完整性,提高其在聚合物中的分散性,南开大学的Liang等[76]在2009年研制了一种由质量分数为1%的磺化石墨烯(sulfonated-Graphene,sG)与热塑性聚氨酯(Thermoplastic Polyurethane,TPU)构成的sG/TPU纳米复合材料,如图11所示。通过与rGO/TPU和异氰酸酯-石墨烯/TPU等复合材料的对比得到,sG/TPU复合材料有更好的有机溶液溶解性和红外光吸收性,形状恢复性较好(88%~95%),但可重复驱动性较差(10次左右)。
3 存在的问题及发展趋势
随着对石墨烯材料研究的不断深入,研究人员已经制备出多种具有光机械效应的石墨烯复合材料,在光驱动方面的研究进展明显。但要实现在生物医疗、微纳机械等领域的应用,仍面临诸多问题。目前存在的问题主要有:(1)石墨烯材料与聚合物构成复合材料时,分散性较差,影响整体的力学性能和光驱动性能;(2)石墨烯层数、质量分数等对复合材料光驱动效率的影响尚不清楚;(3)石墨烯复合材料受大分子聚合物(如水凝胶)性质的影响,驱动的可重复性降低并且对驱动环境有一定的依赖性;(4)石墨烯复合材料的光机械转换效率依旧较低;(5)精确控制光驱动器中复合材料的光热转换能力仍然是个挑战。

图11 红外驱动sG/TPU示意图[76] (a)红外光照射前(左)、后(右)形状恢复对比;(b)红外光照射sG/TPU提起重物;(c)iG/TPU (isocyanate-graphene/TPU)和sG/TPU红外驱动性能的对比Fig.11 Schemetic diagrams of IR actuation for sG/TPU[76](a)comparison of shape recovery before(left) and after(right) remotely actuated by infrared light;(b)sG/TPU lifting a mass under infrared light;(c)comparison of IR actuation performance for iG/TPU and sG/TPU
随着科技的发展和各领域对驱动装置越来越多的需求,具有远程可控性、生物相容性、能源环保性等优点的红外光驱动技术引起了研究人员的关注。而医疗设备、防爆驱动、光学、微纳机械等领域对光驱动技术的高响应速率、高可重复驱动性、大变形和高机械转换效率等要求也逐渐显现出来。复合材料光驱动技术将在三方面重点发展:(1)改进石墨烯复合材料的合成方法。通过均匀分散石墨烯材料等来提高复合材料的光机械转换效率,使驱动器具有更好的驱动性能;(2)进行复合材料的动力学研究。探索石墨烯材料种类、片层数、质量分数等对复合材料响应速率、可重复驱动性等性能的影响,为实际应用奠定理论基础;(3)探索将石墨烯材料与其他材料(如CNTs)结合用作复合材料的填料,来进一步提高复合材料力学性能,实现石墨烯复合材料光驱动器的更高效、快速驱动。
4 结束语
基于石墨烯复合材料的光驱动器可将光照转换为机械变形,具有无线驱动、远程控制、低噪声等诸多优点。特别是,因质量轻、加工性能好、低成本、具有类似人工肌肉的高效性,而具有广阔的应用前景。基于石墨烯基大分子复合材料的光驱动器主要有单层薄膜驱动和双层薄膜驱动两种。单层薄膜光驱动器制作简单,但受预拉伸力引起光驱动的不确定性、响应速率较慢、形状恢复性差等因素影响,限制了其进一步应用。双层薄膜光驱动器响应速率快、可重复驱动性较好,但其光机械转换效率较低,目前仍处于研究阶段。而基于石墨烯磺化物复合材料的光驱动器的石墨烯材料分散性好、形状恢复性佳,但可重复驱动性较差。目前,基于石墨烯复合材料的光驱动器仍存在石墨烯材料分散不均匀、影响光驱动效率的因素不明确、对驱动环境有一定的依赖性、光机械转换效率较低等问题。尝试将石墨烯材料与不同聚合物构成具有光机械效应的复合材料是目前的主要研究热点之一。通过改善石墨烯复合材料的合成方法,探索石墨烯材料与其他材料一起作为光驱动复合材料的填料等是未来的主要发展趋势。总之,因具有非整体驱动、远程可控、环保等诸多优点,基于石墨烯复合材料的光驱动技术在仿生物研究、微型机器人、生物医疗等领域将发挥重要作用。
[1] ZHANG L,WANG X,LI R,et al. Microcombing enables high-performance carbon nanotube composites[J]. Composites Science & Technology,2016,123:92-98.
[2] GUALANDI C,CELLI A,ZUCCHELLI A,et al. Advances in polymer science[J]. Advances in Polymer Science,2014,267:87-142.
[3] KIM J S,LEE D Y,KOH J S,et al. Component assembly with shape memory polymer fastener for microrobots[J]. Smart Materials & Structures,2014,23(1):15011-15022.
[4] YOON C K,XIAO R,PARK J H,et al. Functional stimuli responsive hydrogel devices by self-folding[J]. Smart Materials & Structures,2014,23(9):639-650.
[5] BOYVAT M,HAFNER C,CEUTHOID J,et al. Wireless control and selection of forces and torques--towards wireless engines[J]. Scientific Reports,2014,4(2/3):5681.
[6] WEI J,LIU Y,CHEN J,et al.Azobenzene-derived surfactants as phototriggered recyclable templates for the synthesis of ordered mesoporous silica nanospheres[J]. Advanced Materials,2014,26(11):1782-1787.
[7] JIANG W,NIU D,LIU H,et al. Photoresponsive soft-robotic platform: biomimetic fabrication and remote actuation[J]. Advanced Functional Materials,2014,24(48):7598-7604.
[8] PATEL R,KUMARI M,KHAN A B. Recent advances in the applications of ionic liquids in protein stability and activity: a review[J]. Applied Biochemistry & Biotechnology,2014,172(8):3701-3720.
[9] LOOMIS J,FAN X,KHOSRAVI F,et al. Graphene/elastomer composite-based photo-thermal nanopositioners[J]. Scientific Reports,2013,3(5):1900.
[10] HU Y,WU G,LAN T,et al. A graphene-based bimorph structure for design of high performance photoactuators[J]. Advan-ced Materials,2015,27(47):7867-7873.
[11] LIMA M D,NA L,MONICA J D A,et al. Electrically,chemically,and photonically powered torsional and tensile actuation of hybrid carbon nanotube yarn muscles[J].Science,2012,338(6109):928-932.
[12] LIU K,CHENG C,CHENG Z,et al. Giant-amplitude, high-work density microactuators with phase transition activated nanolayer bimorphs[J]. Nano Letters,2012,12(12):6302-6308.
[13] MORIMOTO M,IRIE M. A diarylethene cocrystal that converts light into mechanical work[J]. Journal of the American Chemical Society,2010,132(40):14172-14178.
[14] SINGHAL P,SMALL W,COSGRIFF-HERNANDEZ E,et al. Low density biodegradable shape memory polyurethane foams for embolic biomedical applications[J].Acta Biomaterialia,2014,10(1):67-76.
[15] GRECO F. Liquid single crystal elastomer/conducting polymer bilayer composite actuator: modelling and experiments[J]. Soft Matter,2013,9(47):11405-11416.
[16] PONNAMMA D,SADASIVUNI K K,GROHENS Y,et al. Carbon nanotubes based elastomer composites-an approach towards multifunctional materials[J]. Journal of Materials Chemistry C,2014,2(40):8446-8485.
[17] HABERL J M,SNCHEZ-FERRER A,MIHUT A M,et al. Light-controlled actuation,transduction,and modulation of magnetic strength in polymer nanocomposites[J]. Advanced Functional Materials,2014,24(21):3179-3186.
[18] SAHOO N G,RANA S,CHO J W,et al. Polymer nanocomposites based on functionalized carbon nanotubes[J]. Progress in Polymer Science,2010,35(7):837-867.
[19] ZHANG X F,LIU T,SREEKUMAR T V, et al. Poly(vinyl alcohol)/SWNT composite film[J].Nano Letters,2003,3(9):1285-1288.
[20] GHOSH S,DUTTA S,GOMES E,et al. Increased heating efficiency and selective thermal ablation of malignant tissue with DNA-encased multiwalled carbon nanotubes[J].ACS Nano,2009,3(9):2667-2673.
[21] KULKARNI D D,CHOI I,SINGAMANENI S S,et al. Graphene oxide-polyelectrolyte nanomembranes[J].ACS Nano,2010,4(8):4667-4676.
[22] WANG E,DESAI M S,LEE S W. Light-controlled graphene-elastin composite hydrogel actuators[J]. Nano Letters,2013,13(6):2826-2830.
[23] FRANCOIS P,ANDREIA F D F,MENACHEM E. Environmental applications of graphene-based nanomaterials[J]. Cheminform,2015,44(16):5861-5896.
[24] HONTORIA-LUCAS C,LPEZ-PEINADO A J,LPEZ-GON-ZLEZJ D D, et al. Study of oxygen-containing groups in a series of graphite oxides: physical and chemical characterization[J]. Carbon,1995,33(11):1585-1592.
[25] NOVOSELOV K S,GEIM A K,MOROZOV S V,et al. Electric field effect in atomically thin carbon films[J]. Science,2004,306(5696):666-669.
[26] HEER W A D,BERGER C,WU X,et al. Epitaxial graphene[J]. Solid State Communications,2007,143(1/2):92-100.
[27] LEE S H,LEE Y,YOH J J. Reduced graphene oxide coated polydimethylsiloxane film as an optoacoustic transmitter for high pressure and high frequency ultrasound generation[J]. Applied Physics Letters,2015,106(8):241904-241909.
[28] BAE S,KIM H K,LEE Y,et al. 30 inch roll-based production of high-quality graphene films for flexible transparent electrodes[J]. Eprint Arxiv,2009,5(8):574-578.
[29] LIU J,WANG C,JIANG Y,et al. Graphene signal amplification for sensitive and real-time fluorescence anisotropy detection of small molecules[J]. Analytical Chemistry,2013,85(3):1424-1430.
[30] LU Q,ARROYO M,HUANG R. Elastic bending modulus of monolayer graphene[J]. Journal of Physics D Applied Physics,2009,42(1):102002-102007.
[31] GUSYNIN V P,SHARAPOV S G. Unconventional integer quantum Hall effect in graphene[J]. Physical Review Letters,2005,95(14):146801.
[32] SCHWAB M G,NARITA A,HERNANDEZ Y,et al. Structurally defined graphene nanoribbons with high lateral extension[J]. Journal of the American Chemical Society,2012,134(44):18169-18172.
[33] LEE C,WEI X,KYSAR J W,et al. Measurement of the elastic properties and intrinsic strength of monolayer graphene [J]. Science,2008,321(5887):385-388.
[34] BHATTACHARYA K. Microstructure of martensite[M]. New York:Oxford University Press,2003.
[35] SIMONE P,MICHELE L,CINZIA C,et al. Breakdown of the adiabatic born-oppenheimer approximation in graphene[J]. Nature Material,2007,6(3):198-201.
[36] GONG L,KINLOCH I A,YOUNG R J,et al. Interfacial stress transfer in a graphene monolayer nanocomposite[J]. Revista De Protección Vegetal,2010,22(24):2694-2697.
[37] JIANG J W,WANG J S,LI B,et al. Thermal conductance of graphene and dimerite[J]. Physical Review B Condensed Matter,2009,79(20):14-17.
[38] WANG S,TAMBRAPARNI M,QIU J,et al. Thermal expansion of graphene composites[J]. Macromolecules, 2009,42(14):5251-5255.
[39] BAO W Z,MIAO F,CHEN Z,et al. Ripple texturing of suspended graphene atomic membranes[J]. 1038/nnano,2009.
[40] HUANG X,QI X,BOEY F,et al. Graphene-based composites[J]. Chemical Society Reviews,2011,41(2):666-686.
[41] ACIK M,LEE G,MATTEVI C,et al. Unusual infrared-absorption mechanism in thermally reduced graphene oxide[J]. Nature Materials,2010,9(10):840-845.
[42] TSUNG-TA T,YUANBO Z,CHEOL-HWAN P,et al. A tunable phonon-exciton Fano system in bilayer graphene[J]. Nature Nanotechnology,2010,5(1):32-36.
[43] SAMOILOV V M,NIKOLAEVA A V,DANILOV E A,et al. Preparation of aqueous graphene suspensions by ultrasonication in the presence of a fluorine-containing surfactant[J]. Inorganic Materials,2015,51(2):98-105.
[44] ZHU Y,MURALI S,CAI W,et al. Graphene-based materials: graphene and graphene oxide: synthesis, properties, and applications[J]. Advanced Materials,2010,22(35):3906-3924.
[45] KRISHNAMOORTHY K,VEERAPANDIAN M,MOHAN R,et al. Investigation of Raman and photoluminescence studies of reduced graphene oxide sheets[J]. Applied Physics A,2012,106(3):501-506.
[46] ZHU S E,SHABANI R,RHO J,et al. Graphene-based bimorph microactuators[J]. Nano Letters,2011,11(3):977-981.
[47] HUANG Y. The application of graphene based materials for actuators[J]. Journal of Materials Chemistry,2012,22(9):3671-3679.
[48] ANSARI S,RAHIMA C,MURALIDHARAN M N. Photomechanical characteristics of thermally reduced graphene oxide-polydimethylsiloxane nanocomposites[J].Polymer-Plastics Technology and Engineering,2013,52(15):1604-1610.
[49] ZHANG X,YU Z,WANG C,et al. Photoactuators and motors based on carbon nanotubes with selective chirality distributions[J]. Nature Communications,2014,5(1):149-168.
[50] CHUA C K,PUMERA M. Chemical reduction of graphene oxide: a synthetic chemistry viewpoint[J]. Chemical Society Reviews,2013,43(1):291-312.
[51] PEI S,CHENG H M. The reduction of graphene oxide[J]. Carbon,2012,50(9):3210-3228.
[52] STANKOVICH S,PINER R D,NGUYEN S B T,et al. Synthesis and exfoliation of isocyanate-treated graphene oxide nanoplatelets[J]. Carbon,2006,44(15):3342-3347.
[53] LO C W,ZHU D,JIANG H. An infrared-light responsive graphene-oxide incorporated poly(N-isopropylacrylamide) hydrogel nanocomposite[J]. Soft Matter,2011,7(12):5604-5609.
[54] BALANDIN A A. Thermal properties of graphene and nanostructured carbon materials[J]. Nature Material, 2011,10(8): 569-581.
[55] MANJAVACAS A,THONGRATTANASIRI S,GREFFET J J,et al. Graphene optical-to-thermal converter[J].Applied Physics Letters,2014,105(21):553-557.
[56] HU J,ZHU Y,HUANG H,et al. Recent advances in shape-memory polymers: structure, mechanism, functionality, modeling and applications[J]. Progress in Polymer Science,2012,37(12):1720-1763.
[57] LOOMIS J,KING B,BURKHEAD T,et al. Graphene-nanoplatelet-based photomechanical actuators[J]. Nanotechnology,2012,23(4):119-156.
[58] SHPIGEL M,LEE J,SOOHOO B,et al. Layer dependent mechanical responses of graphene composites to near-infrared light[J]. Applied Physics Letters,2012,100(7):491.
[59] DONG H Y,YOO H J,MAHAPATRA S S,et al. The synergistic effect of the combined thin multi-walled carbon nanotubes and reduced graphene oxides on photothermally actuated shape memory polyurethane composites[J]. Journal of Colloid & Interface Science,2014,432(20):128-134.
[60] PORWAL H,TATARKO P,GRASSO S,et al. Toughened and machinable glass matrix composites reinforced with graphene and graphene-oxide nano platelets[J]. Science & Technology of Advanced Materials,2013,14(5):55007-55010.
[61] LIM G K,CLARK J,HO P K H,et al. Giant broadband nonlinear optical absorption response in dispersed graphene single sheets[J]. Nature Photonics,2011,5(9):554-560.
[62] ZHAO Y,SONG L,ZHANG Z,et al. Stimulus-responsive graphene systems towards actuator applications[J]. Energy & Environmental Science,2013,6(12):3520-3536.
[63] CHENG H,LIU J,ZHAO Y,et al. Graphene fibers with predetermined deformation as moisture-triggered actuators and robots[J]. Angewandte Chemie International Edition,2013,125(40):10676-10680.
[64] ROBINSON J T,TABAKMAN S M,LIANG Y,et al. Ultrasmall reduced graphene oxide with high near-infrared absorbance for photothermal therapy[J]. Journal of the American Chemical Society,2011,133(17):6825-6831.
[65] SHI K,LIU Z,WEI Y Y,et al. Near-infrared light-responsive poly(N-isopropylacrylamide)/graphene oxide nanocomposite hydrogels with ultrahigh tensibility[J]. ACS Applied Materials & Interfaces,2015,7(49):27289-27298.
[66] LASHGARI S. Shape memory nanocomposite of poly(L-lactic acid)/graphene nanoplatelets triggered by infrared light and thermal heating[J]. Express Polymer Letters,2016,10(4):349-359.
[67] REYSSAT E,MAHADEVAN L.Hygromorphs:from pine cones to biomimetic bilayers[J]. Journal of the Royal Society Interface,2009,6(39):951-957.
[68] HU Y,LAN T,WU G,et al. A spongy graphene based bimorph actuator with ultra-large displacement towards biomimetic application[J]. Nanoscale,2014,6(21):12703-12709.
[69] JI M,JIANG N,CHANG J,et al. Near-infrared light-driven, highly efficient bilayer actuators based on polydopamine-modified reduced graphene oxide[J]. Advanced Functional Materials,2014,24(34):5412-5419.
[70] LIU B,LI C,LIU Q L,et al. Hybrid film of silver nanowires and carbon nanotubes as a transparent conductive layer in light-emitting diodes[J]. Applied Physics Letters,2015,106(3):2779.
[71] TACCOLA S,GRECO F,SINIBALDI E,et al. Soft actuators: toward a new generation of electrically controllable hygromorphic soft actuators[J]. Advanced Materials,2015,27(10):1668-1675.
[72] WU C Z,FENG J,PENG L L,et al. Large-area graphene realizing ultrasensitive photothermal actuator with high transparency: new prototype robotic motions under infrared-light stimuli[J].Journal of Materials Chemistry,2011,21(46):18584-18591.
[73] MA Y,ZHANG Y Y,WU B S,et al. Polyelectrolyte multilayer films for building energetic walking devices[J]. Angewandte Chemie International Edition,2011,50(28):6254-6257.
[74] ZHANG E Z,WANG T,HONG W,et al. Infrared-driving actuation based on bilayer graphene oxide-poly(N-isopropylacrylamide) nanocomposite hydrogels[J]. Journal of Materials Chemistry A,2014,2(37):15633-15639.
[75] MU J K,HOU C Y,WANG H Z,et al. Origami-inspired active graphene-based paper for programmable instant self-folding walking devices[J]. Child Maltreatment,2015,1(10):114-125.
[76] LIANG J J,XU Y F,HUANG Y,et al. Infrared-triggered actuators from graphene-based nanocomposites[J]. Journal of Physical Chemistry C,2009,113(22):9921-9927.
猜你喜欢
红外技术(2022年11期)2022-11-25
中国典型病例大全(2022年7期)2022-04-22
纺织科学研究(2021年1期)2021-03-19
电脑爱好者(2020年6期)2020-05-26
现代装饰(2019年11期)2019-12-20
动漫界·幼教365(小班)(2018年3期)2018-05-14
北京航空航天大学学报(2017年5期)2017-11-23
光学精密工程(2016年5期)2016-11-07
现代工业经济和信息化(2016年8期)2016-05-17
舰船科学技术(2016年1期)2016-02-27
