
无人机飞行姿态模拟器设计*
2018-04-18 07:00:25董成举1杨剑锋1李小兵潘广泽1袁泽谭严拴航
自动化与信息工程 2018年1期
董成举1 杨剑锋1 李小兵 潘广泽1 袁泽谭 严拴航
无人机飞行姿态模拟器设计*
董成举1,3,4杨剑锋1,3,4李小兵1,2,4潘广泽1,3,4袁泽谭5严拴航5
(1.工业和信息化部电子第五研究所 2.广东省电子信息产品可靠性技术重点实验室 3.广东省无人机可靠性与安全性工程技术研究中心 4.广东省工业机器人可靠性工程实验室 5.航空工业第一飞机设计研究院)
在对无人机等设备开展环境及可靠性试验时,为模拟其飞行姿态设计了一种无人机飞行姿态模拟器(二维转台)。首先,介绍了飞行姿态模拟器的关键零部件选型;然后,为使飞行姿态模拟器满足无人机相关试验要求,通过有限单元法对其进行静力学分析及模态分析,并研究转动零部件的等效建模方法;最后,计算结果显示:飞行姿态模拟器在重力作用下的最大变形量为0.298 mm,整体结构的基频为16.6 Hz,模态振型为绕底座轴扭转。仿真结果表明:飞行姿态模拟器设计合理,能满足试验需求。
无人机;飞行姿态模拟器;有限单元法
0 引言
在对无人机等开展环境及可靠性试验时,为更好地模拟其在飞行中不同姿态载荷时的性能表现,需要在试验过程中改变其转向和倾角。目前由于技术和成本限制,大部分试验是在无人机固定位姿的情况下进行,而飞行姿态模拟器具有2个自由度,能够改变试验样机的姿态。
世界上第一台二维转台是美国麻省理工学院于1945年研制,英、法、德等国家在这方面也有较多研究[1-2]。我国从60年代中期开始进行相关研究,目前研究水平已经达到世界前列[3-5]。但飞行姿态模拟器多用于航空航天领域,民用领域较少[6]。
本文对无人机环境及可靠性试验用飞行姿态模拟器进行设计及研究。由于试验环境条件严苛,因此对飞行姿态模拟器的强度、刚度和模态等方面提出了较高要求[7-8]。首先介绍飞行姿态模拟器的结构设计及部件选型,再介绍其建模和静力学及模态的仿真分析,最后得到其变形量、固有频率和主振型。
1 飞行姿态模拟器结构设计
飞行姿态模拟器有2个转轴,可提供2个自由度的转动,包括起支撑作用的底座部分和工作的负载部分,如图1所示。底座部分主要包括安装底座、伺服电机2、减速器2、联轴器2、制动器2和圆锥滚子轴承等;负载部分包括伺服电机1、减速器1、联轴器1、负载平台、制动器1和滚珠轴承等。
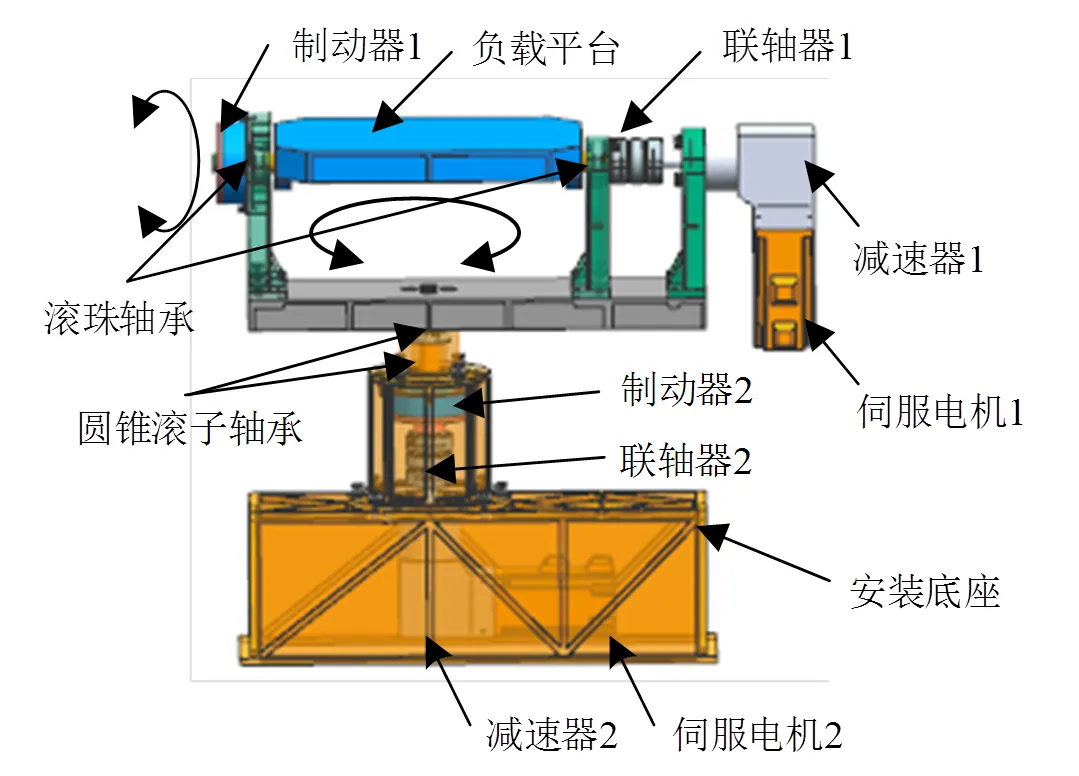
图1 飞行姿态模拟器三维结构图
工作时,伺服电机1通过减速器1和联轴器1带动负载平台绕图1所示方向转动产生第一个自由度;伺服电机2通过减速器2和联轴器2带动负载部分绕图1所示方向转动产生第二个自由度,伺服电机的转动角度和角速度通过程序控制。
2 飞行模拟器关键部件选型
2.1 使用环境条件
无人机正常工作温度范围是−10℃~50℃,样品高低温试验时温度范围可达−20℃~70℃。因此,需要飞行姿态模拟器也能承受相应的温度区间。
2.2 关键部件选型
对飞行模拟器的轴承、伺服电机、减速器、联轴器和制动器等关键部件选型时,需考虑其使用环境。
轴承是支撑旋转的关键部件,需具有耐热性、耐水性、非磁性且防锈等特征。负载部分轴承主要承受径向力,选用深沟球轴承;底座部分轴承主要承受轴向力,因此选用圆锥滚子轴承。
伺服电机和减速器也需能耐受高低温,其贮存温度范围分别为−40℃~85℃,−30℃~90℃。飞行模拟器的关键部件型号及工作温度范围如表1所示。

表1 飞行模拟器关键部件型号及工作温度范围
联轴器是链接减速器与转动轴的关键部件,本文的飞行模拟器载荷较小,在底座和负载部分均采用弹性联轴器。为更好地控制工作平台的转动角度,防止控制异常、限位失效等特殊情况的发生,在底座和负载部分转轴末端均安装电磁制动器。
3 飞行姿态模拟器有限元建模
本文设计的飞行姿态模拟器包括减速器、滚珠轴承、圆锥滚子轴承、电磁制定器等机械传动部件,由于这些部件都有微小间隙,属于非线性问题,因此在进行有限元仿真分析时需要考虑其非线性因素。对于非线性问题进行区间离散,在小尺度区间内将非线性问题线性化,建立关键部件的等效线性化模型。飞行姿态模拟器有限元模型如图2所示。

图2 飞行姿态模拟器有限元模型
3.1 轴承等效建模
为模拟轴承的转动,采用多点约束法(MPC)建模。利用MPC中的刚性单元RBE2模拟轴承的转动有2种建模方法。
方法1:在轴承的圆心处建立节点1,节点1(独立节点)与轴承外圈的内节点(非独立节点)通过RBE2刚性单元进行连接;同理,在轴承的中心处建立节点2,节点2(独立节点)与轴承内圈外节点(非独立节点)通过RBE2刚性单元进行连接。由于节点1与节点2为独立节点,因此具有、、、、、6个自由度。在节点1建立局部坐标系1,坐标系的轴沿轴承转轴方向,修改节点1与节点2的分析坐标系为局部坐标系1;设置节点1为独立节点、节点2为非独立节点,利用RBE2连接节点1与节点2,约束、、、、方向5个自由度,约束方向自由度,如图3所示。
方法2:对轴承进行简化,删除在轴承中心处建立的局部圆柱坐标系1,使圆柱坐标系1的轴沿轴承转轴方向,修改轴承外圈内节点与轴承内圈外节点的分析坐标系,设置其分析坐标系为局部圆柱坐标系1。将轴承外圈内节点与其重合的轴承内圈外节点用RBE2进行连接,约束圆柱坐标系轴与轴方向的自由度,释放轴方向的自由度,如图4所示。
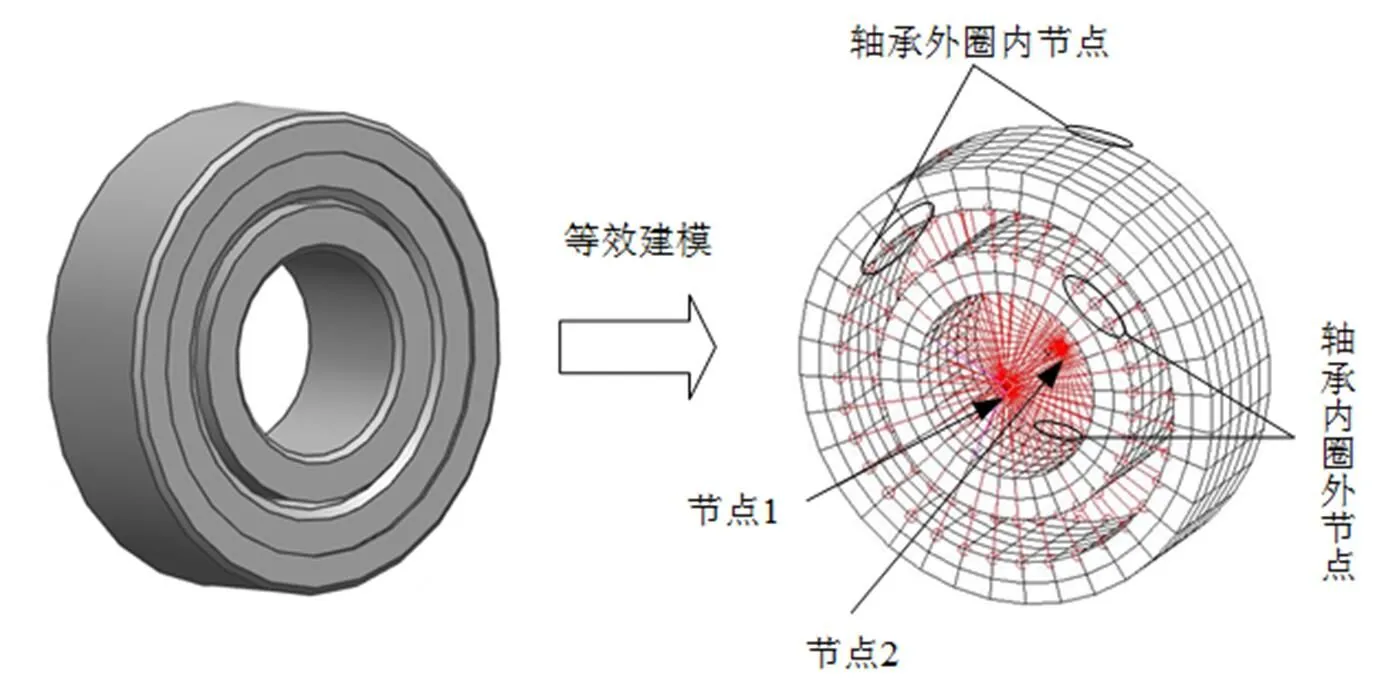
图3 轴承等效模拟建模方法1

图4 轴承等效模拟建模方法2
方法1的特点是操作方便,只需定义3个RBE2单元,但得到的轴承等效模型刚度值偏大;方法2的特点是操作繁琐,需要定义多个RBE2单元,在重复节点处引入刚性单元,使模拟结果更加准确,因此本文在仿真分析中采用第2种等效建模方法。
3.2 制动器锁紧等效建模
当飞行姿态模拟器停止工作时,电磁制动器处于锁紧状态,制动器的动子部分与转动轴相连,定子部分与支撑结构件相连。飞行模拟器的制动器属于摩擦制动型,带电自锁时制动器动子与定子通过电磁力吸附自锁。当自锁力比较大时,可假定定子与动子部分为一个整体,有限元建模时将制动器定子与动子接触面处的节点进行耦合处理。
3.3 伺服电机与减速器等效建模
伺服电机与减速器为购置件,无法得到其具体的三维模型,只能得到其外形三维模型。在有限元建模时,只考虑伺服电机与减速器的质量与转动惯量。表2为伺服电机与减速器的具体参数。伺服电机与减速器之间的装配连接,采用连接处节点耦合的方法,有限元等效模型如图5所示。
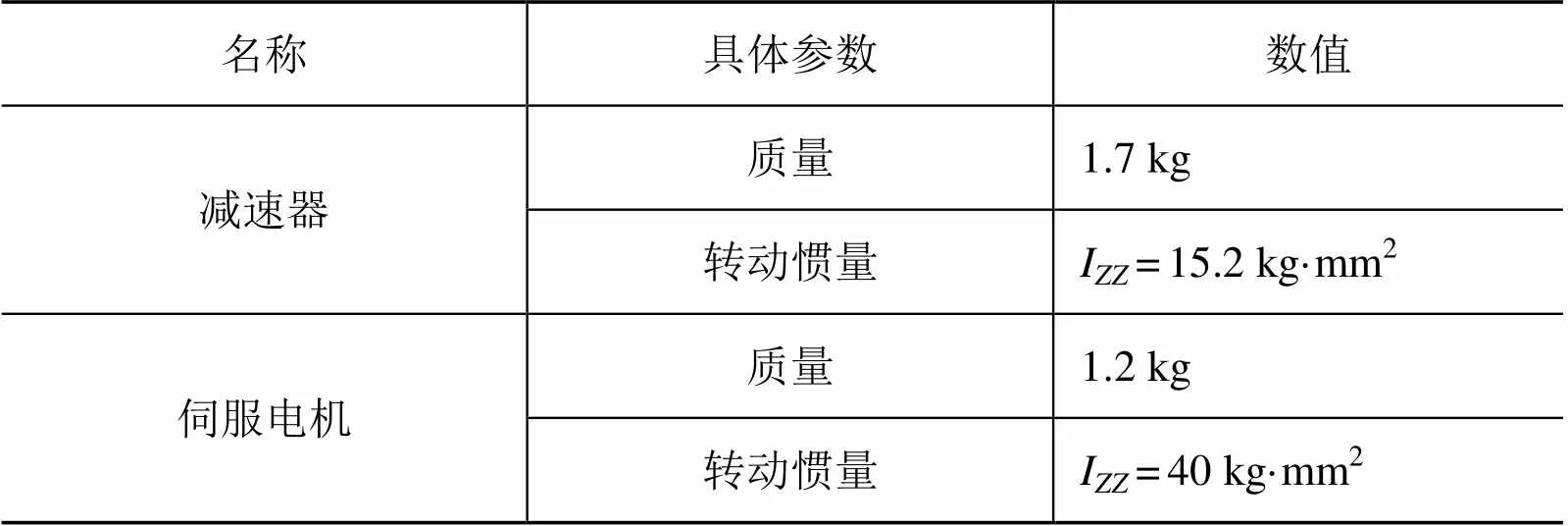
表2 伺服电机与减速器参数

图5 伺服电机与减速器等效有限元模型
4 飞行姿态有限元仿真分析
4.1 飞行姿态模拟器静力学分析
在飞行姿态模拟器设计过程中,为满足负载部分的几何对称,其平台没有进行质量平衡设计,为此需要分析负载部分在重力作用下的变形量。在图2飞行姿态模拟器的有限元模型中,安装底座的安装面部分采用实体网格体,对于实体单元,节点有、、3个自由度。在静力学分析时,约束安装点处节点的3个平动自由度,并设置重力加速度为9.8 m/s2,方向沿总体坐标系−轴,如图6所示。
4.2 飞行姿态模拟器模态分析
飞行姿态模拟器的设计过程中需考虑其结构动力学特性。模态分析是研究结构动力学特性的常见方法。
在总坐标系下,图2飞行姿态模拟器有限元模型的动力学方程为

仿真结果表明:在重力作用下飞行姿态模拟器的U型架出现轻微弯曲变形,最大变形量为0.23 mm。伺服电机通过减速器与U型架相连,由于U型架发生弯曲变形,变形量被放大,因此伺服电机顶角处显示的位移量为0.298 mm,如图7所示。

图7 分析结果云图

对式(2)进行求解,可得到固有频率和模态振型,如表3所示。

表3 飞行姿态模拟器前6阶固有频率及振型
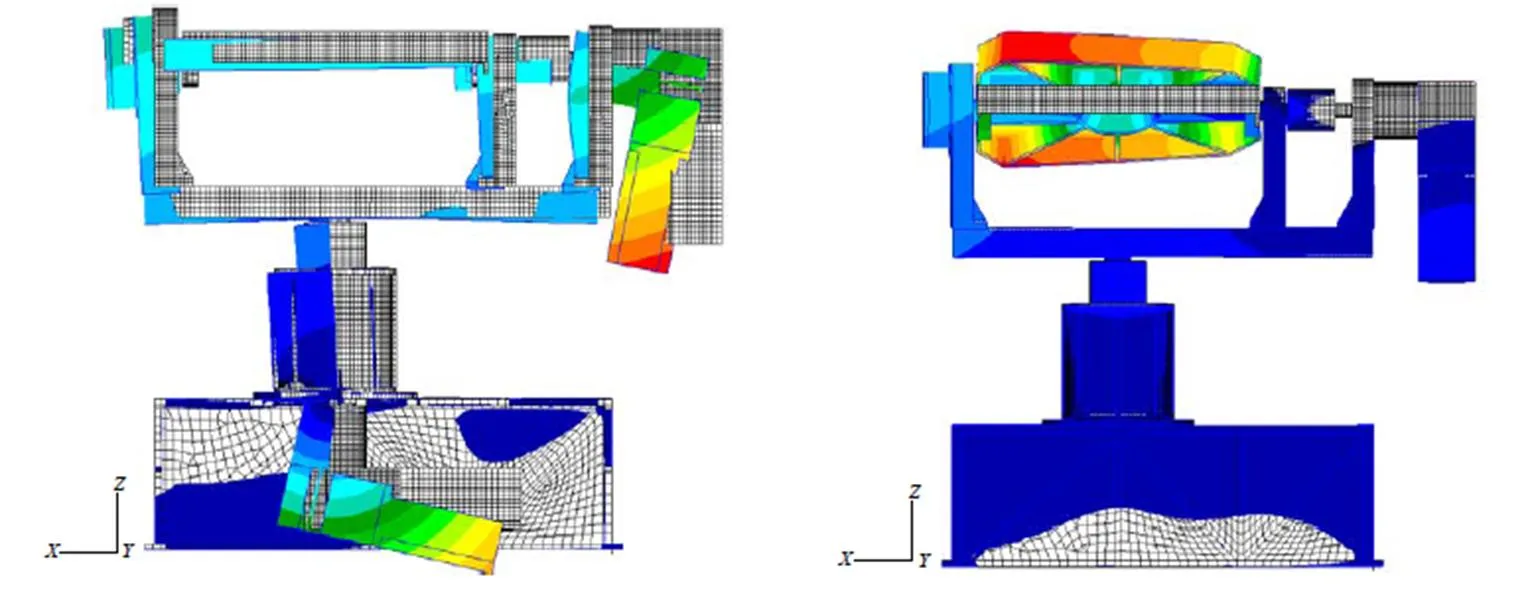
飞行姿态模拟器前6阶模态振型如图8所示:飞行姿态模拟器的基频为16.6 Hz,主振型的表现形式为绕偏航轴方向进行扭转,影响该阶固有频率的主要因素是轴系、轴承等在偏航轴方向的刚度;第2阶固有频率为27.7 Hz,主振型的表现形式为转台的左右摇摆,主要由转台支撑板发生弯曲变形引起;第3阶固有频率为47.8 Hz,主振型的表现形式为转台的前后摇摆,主要由转台左支撑架的完全变形引起;第4阶固有频率为94.5 Hz,主振型的表现形式为伺服电机摇摆,该阶固有频率与伺服电机及减速器组成的装配体的整体刚度有关;第5阶固有频率为106.6 Hz,主振型的表现形式为伺服电机与负载平台的摇摆;第6阶固有频率为120.9 Hz,主振型的表现形式为负载平台的俯仰摆动,影响该阶固有频率的主要因素与影响基频的因素相似。
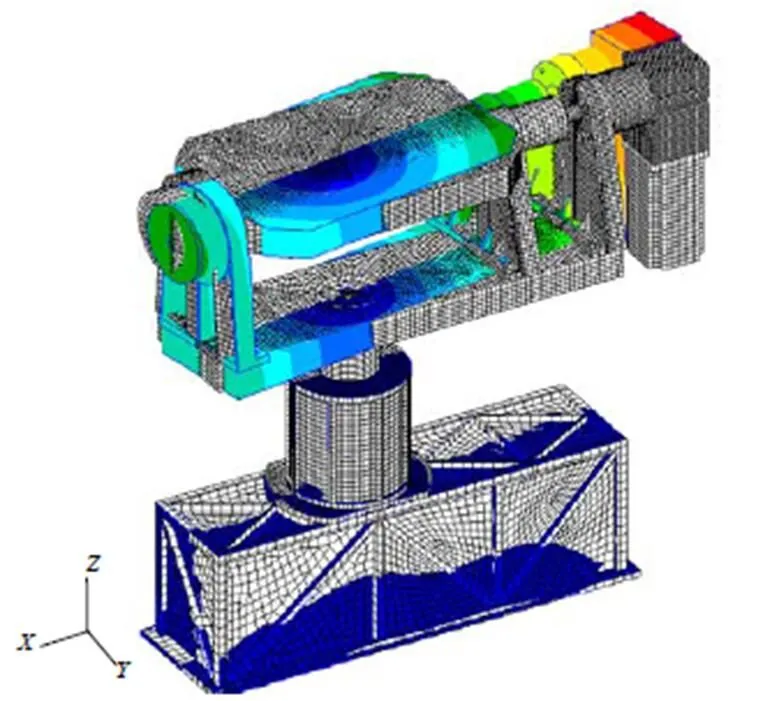
图8(a)第1阶模态 16.6 Hz
图8(b)第2阶模态 27.7 Hz

图8(c)第3阶模态 47.8 Hz
图8(d)第4阶模态 94.5 Hz
(e) 第5 阶模态106.6 Hz (f) 第6 阶模态120.9 Hz
5 结语
为无人机开展可靠性与环境适应性试验,本文设计了一种无人机飞行姿态模拟器,并对该模拟器的结构设计及关键零部件的选型进行了介绍。为分析该模拟器的结构力学特性,提出一种等效模拟机械传动部件的有限元建模方法,并基于该方法对飞行姿态模拟器进行了有限元建模与仿真分析。分析结果表明:该模拟器动力学特性良好,满足实际使用需求。
[1] 艾敏.二维转台结构分析及动力学仿真[D].长春:长春理工大学,2011.
[2] 铁维泽.二维精密转台动力学特性仿真分析[D].长春:长春理工大学,2009.
[3] 谢涛.飞行仿真转台结构动力学分析及其优化设计研究[D].哈尔滨:哈尔滨工业大学,2003.
[4] 郭林亮,祝明红,傅澔,等.一种低速风洞虚拟飞行试验装置的建模与仿真[J].空气动力学学报,2017,35(5):708-717,726.
[5] 王昱峰,张新磊,张功,等.飞行仿真转台的软件控制系统设计[J].计算机测量与控制,2017,25(6):104-106,123.
[6] 吴海桥,刘超,葛红娟,等.基于模型检验的飞机系统安全性分析方法研究[J].中国民航大学学报,2012,30(2):17-20.
[7] 贺帅,王忠素.二维转台的模态分析与试验验证[J].制造业自动化,2016,38(5):139-141,146.
[8] 常金彪.红外热像源二维转台的设计研究[D].南京:南京理工大学,2012.
Design of Flight Attitude Simulator of UAV
Dong Chengju1,3,4Yang Jianfeng1,3,4Li Xiaobing1,2,4Pan Guangze1,3,4Yuan Zetan5Yan Shuanhang5
(1. The Fifth Electronic Institute of MIIT 2. Guangdong Provincial Key Laboratory of Electronic Information Products Reliability Technology 3. Guangdong Provincial Engineering Technology Research Center of UAV Reliability and Safety 4. Guangdong Industrial Robot Reliability Engineering Laboratory 5. Avic the First Aircraft Institute)
To better simulate the flight attitude of the UAVs when carrying out ETS(Environment test simulation) and reliability tests on UAVs and other equipment, a UAV flight attitude simulator (Two-dimensional turntable) was designed. First, the selection of key parts in the two-dimensional turntable are introduced in consideration of the harsh environment of the ETS. Then, the equivalent modeling method of the rotating parts are studied, besides, the static structural and modal of the turntable are analyzed with FEM method in order to make the two-dimensional turntable meet the test conditions. The results shows that the maximum deformation of the turntable under gravity is 0.298 mm, the fundamental frequency of the whole structure is 16.6 Hz, which shows that the flight attitude simulator is reasonable in design and meet the test requirements.
Unmanned Aerial Vehicle; Flight Attitude Simulator; Finite Element Method
董成举,男,1991年生,硕士,助理工程师,主要研究方向:机电产品可靠性设计与流体机械设计。
杨剑锋(通讯作者),男,1989年生,博士,工程师,主要研究方向:工业机器人可靠性设计与仿真、无人机可靠性测试及安全性研究。E-mail:yangjeff2013@163.com
李小兵,男,1984年生,博士,高级工程师,主要研究方向:装备可靠性。
潘广泽,男,1989年生,硕士,工程师,主要研究方向:产品可靠性设计分析与环境试验。
袁泽谭,男,1990年生,硕士,助理工程师,主要研究方向:产品可靠性。
严拴航,男,1979年生,硕士,高级工程师,主要研究方向:产品可靠性。
工信部民机专项(MJZ-2016-F-24);广东省科技计划项目(2016A040403036);广东省重大科技专项(2017B010116004);广州市工业和信息化发展专项资金(MTV1770140);工业转型升级强基工程(TC150B5C0/41)。
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
微特电机(2020年11期)2020-12-30 19:42:32
铁道通信信号(2019年10期)2019-11-25 09:40:54
军事文摘(2018年24期)2018-12-26 00:57:40
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
工业设计(2016年6期)2016-04-17 06:42:53
现代商贸工业(2016年35期)2016-04-09 06:59:58
