人工智能在航天器控制中的应用*
2018-04-18 07:24刘付成
飞控与探测 2018年1期
刘付成
(1.上海航天控制技术研究所·上海·201109;2.上海市空间智能控制技术重点实验室·上海·201109)
0 引 言
传统航天器是在地面站支持下运行的,存在自主性、时效性差等问题,随着人工智能技术的迅速发展,将人工智能技术应用到航天器运行中,可为航天器自主运行、减少对地面站的依赖提供重要解决方案。本文详细分析了人工智能与航天工业结合的必要性,通过对国内外发展现状的调研对比分析国内外差距,进而针对目前传统航天器发展面临的难题,提出了人工智能在航天器中应用的建议,为航天器智能化发展奠定基础。
1 人工智能对航天器的提升作用
自1956年麦卡锡 (John McCarthy)在达特茅斯研究会上第一次提出了人工智能这一概念以来,人工智能的发展经历了2次繁荣期、2次低谷期、复苏期,2010年至今迎来了大规模发展的增长爆发期。人工智能正在向各个行业渗透,影响和改变着我们生活的方方面面[1]。
随着各国对空间探索和利用的不断深入,航天任务和航天器本身的日益复杂,将会使航天器的发展遇到越来越多的瓶颈:
1)深空探测中星表巡视器对未知环境的探索需地面给出控制指令,星地指令延时40min,无法及时给出控制指令,导致星表探测范围有限,自主性和时效性差,因此需要星表巡视器具备地貌智能识别、自主规划探索路径的能力。
2)对地观测分辨率越高,数据量越大,同时对于有效信息提取的难度也随之增大,单纯依靠人工和地面软件对图像信息进行判读难以满足大量数据快速解读的要求;同时目前采用星地窗口注入指令的方式,人工规划周期1天到数天不等,时效性差,导致对突发事件响应慢,因此需要遥感卫星具备图像在线智能自主识别、智能决策与任务规划的能力。
3)空间目标识别为在轨操控提供目标信息,目前采用基于单一特征的传统图像处理方式,但在复杂空间环境下受阳光直射及其他装置光反射影响,会形成大量杂散光干扰,使得识别准确率受到影响,甚至会导致操控任务失败,因此目标智能感知与匹配识别需求迫切。
4)运载火箭伺服机构因软管破裂、液压锁卡滞、主阀芯卡死等原因易造成损伤故障和卡死故障,导致其控制效率下降或产生不可控制的扰动力矩,传统的控制方法控制策略简单,难以适应伺服故障下的姿态稳定问题;发动机因涡轮泵故障、推力室故障、管路系统故障等原因易造成其推力下降或损失明显,目前地面离线轨道设计无法实时在线调整飞行轨迹,导致飞行任务部分失败或全部失败,因此自主故障诊断及重规划需求迫切。
面向以上需求,将人工智能引入到航天器系统中,将使航天器具备深空探测自主规划及智能勘探能力、星上海量数据在线智能处理能力、复杂目标在轨智能操控能力、智能自主集群协同控制能力、针对系统不确定性进行综合判断与智能决策能力等。因此,人工智能与航天结合的时代已经到来。
AIAA(American Institute of Aeronautics and Astronautics,美国航空航天学会)下属的空间操作与支持技术委员会 (SOSTC)对航天器的自主性及智能性水平进行了调研分析,智能化水平按层次分为Level 1~Level 6这6个等级。Level 1:手动操作;Level 2:自动化;Level 3:有人地面智能推理;Level 4:无人地面智能推理;Level 5:在轨智能推理;Level 6:自主思考航天器[2]。目前国内航天器的智能化水平主要处于Level 2~3,后续通过引入人工智能推动航天器的智能化水平向Level 5~6发展。
2 国内外发展现状及趋势
2.1 国外发展现状
美国高度重视人工智能相关技术的研发与应用,2016年10月,美国OSTP(Office for Information Technology Policy,白宫科技政策办公室)下属的NSTC(National Science and Technology Council,国家科学技术委员会)发布了2份关于人工智能发展的重要报告—— 《为人工智能的未来做好准备》和 《国家人工智能研究与发展战略计划》。2018年3月,美国CSIS(Center for Strategic and International Studies,国际战略研究所)发布了 《美国机器智能国家战略报告》,同年5月白宫主办了人工智能峰会,美国将增加人工智能在各领域的投入,包括对航天器智能控制的探索,确保美国在人工智能领域的世界领先地位。
2.1.1 国外卫星智能技术发展
美国最早在1998年深空一号 (DS-1)计划中对深空航天器任务自主规划、故障诊断修复进行验证,DS-1中应用的自主远程Agent是第一个采用人工智能实现无人监控条件下的航天器在轨控制系统[3](图1)。美国火星探测漫游车 (MER)和好奇号火星车利用车载自主软件对自主障碍规避决策和控制进行验证,火星车将测得数据传回地面,地面操作人员生成任务层面指令发送给火星车,火星车根据该指令自主生成观测任务规划[4-7]。
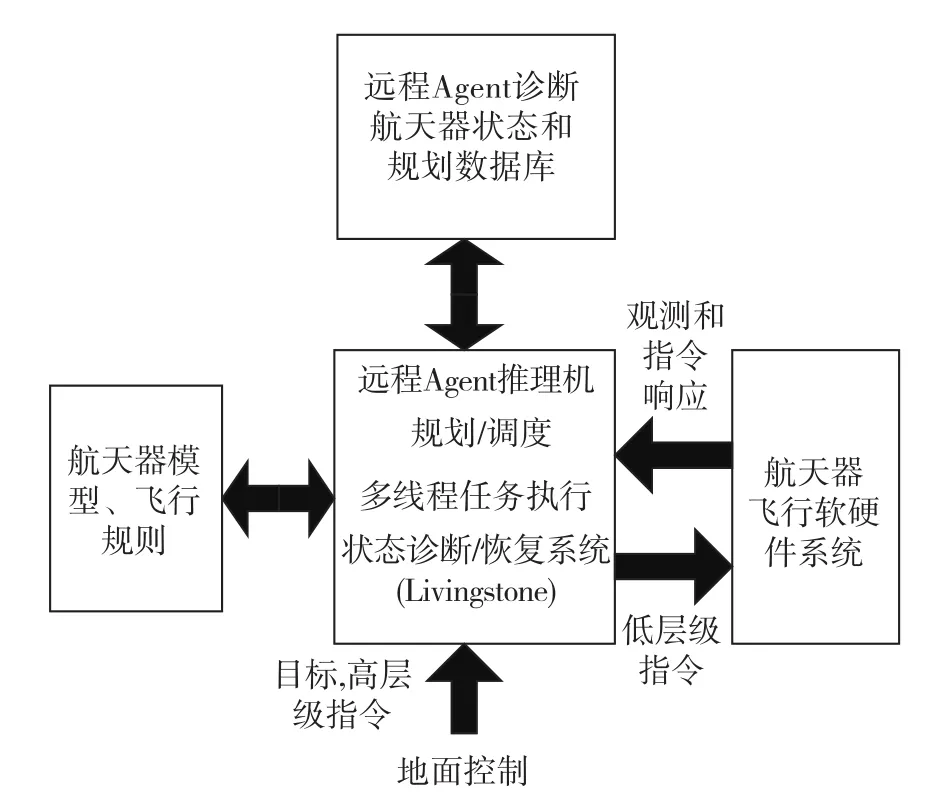
图1 远程Agent系统框架
美国在地球观测1号 (EO-1)和技术卫星-21(TechSat-21)中应用自动科学航天器软件(ASE),对遥感图像在线判读、观测任务自主规划进行验证,能够在线完成遥感图像识别处理,并根据观测到的事件对任务进行重规划,从而在下一个观测周期中自动瞄准感兴趣的观测目标。TechSat-21中的ASE相较于EO-1增加了星群管理软件。ASE是NASA(National Aeronautics and Space Administration,美国国家航空航天局)研制的航天ASPEN(Automated Scheduling and Planning Environment,任务规划调度平台)的在线实时版本。ASPEN根据航天器运行约束、飞行规则、科学试验目标、运行程序等,利用迭代修复算法实现连续规划,自动生成低层次的航天器控制动作序列[8](图2)。
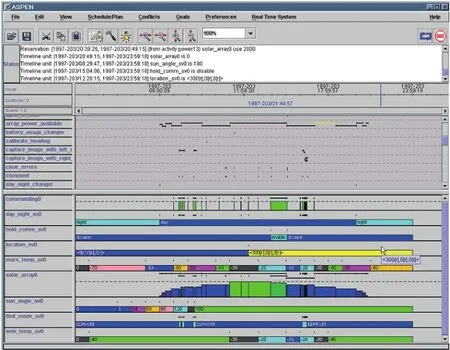
图2 ASPEN软件界面
美国在轨操控任务从最初轨道快车 (Orbit Express)的ORU(Orbital Replacement Unit,在轨可更换单元)更换发展为机器人在轨燃料加注任务 (RRM)的在轨燃料加注,直到2016年启动的RSGS(Robotic Servicing of Geosynchronous Satellites,地球同步轨道卫星机器人服务)项目,其任务是高轨废弃卫星的重新利用,在轨操控任务全面升级。RSGS项目中自主服务航天器(RSV)平台首先完成了对客户卫星的近距离详查,对太阳电池阵、天线展开故障等机械异常进行修正,然后利用携带的FREND-MK2机械臂抓捕客户卫星形成组合体,并进行轨道机动,最后为客户卫星安装升级包,提供新功能[9](图3)。
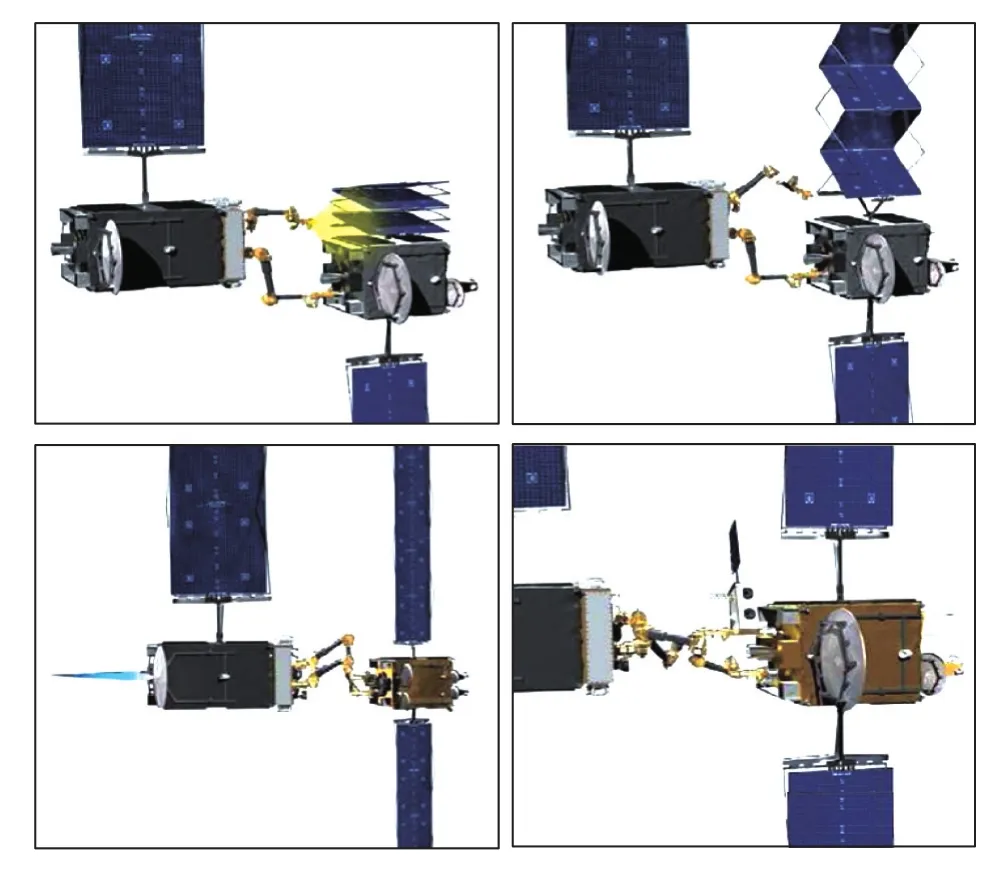
图3 RSGS操控任务过程
美国ANTS(Autonomic Nano Technology Swarm,自主纳技术集群)计划包括:土星自主环形天线阵任务 (SARA)、月球自主探测任务(ALI)、小行星带勘探任务 (PAM),其中ANTS/PAM计划任务是利用集群智能技术探索和勘探小行星带的小行星 (图4)。ANTS/PAM计划包括1000颗皮星,采用分级管理方法,按照功能分为员工 (Worker)、管理员 (Ruler)、信使(Messenger)三种类型,通过协同工作和共享信息完成集群探测任务[10]。
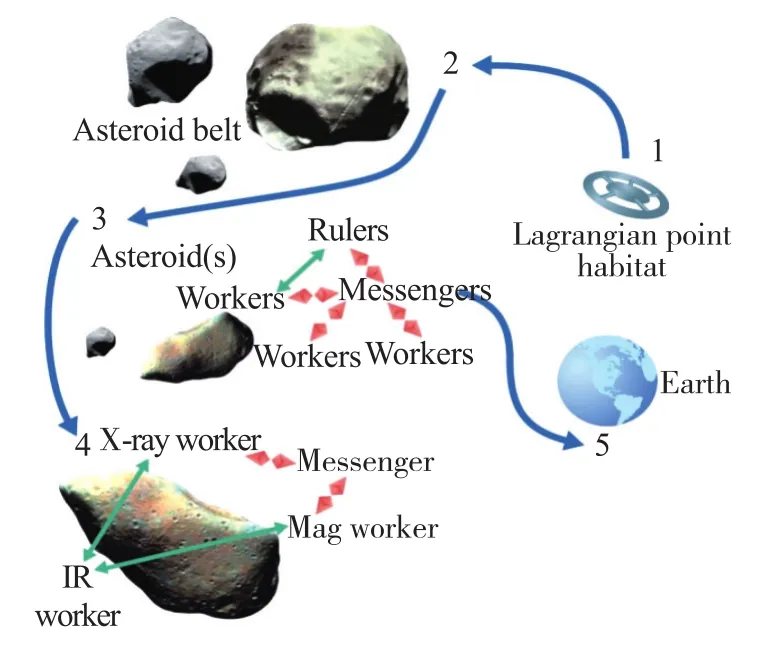
图4 ANTS计划示意图
2.1.2 国外运载智能技术发展
NASA从20世纪60年代应用了简单的状态监测;70年代应用了基于算法的诊断 (阿波罗号);80年代应用了基于知识的智能诊断 (航天飞机);到90年代之后进入自动化、自主化的诊断与健康管理过程[11-12];到21世纪在线轨迹规划得到了应用,如SpaceX火箭在返回段采用了基于凸优化的在线轨迹规划方法,正在研制的美国SLS重型运载火箭在故障下通过自主规划进入一个安全轨道等待救援 (图5)。
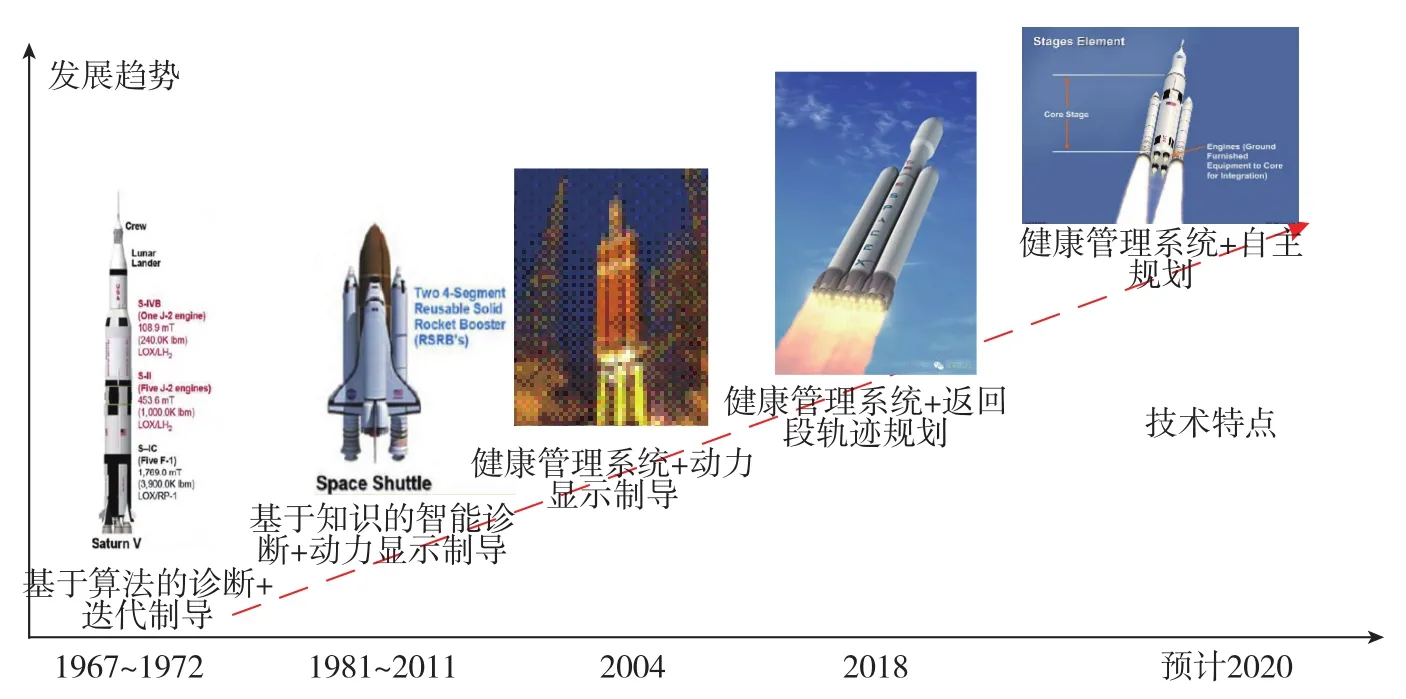
图5 运载智能发展历程
SpaceX运载火箭 (图6)对飞行过程中动力系统实时健康状态检测、飞行任务重规划进行验证。采用牵制释放技术,通过地面及箭上故障检测系统实时监测发动机工作情况,检测到异常可随时中止发射,在发现1台或2台发动机故障的情况下,重新计算和规划飞行轨道,进行自适应制导、控制重构分配 (图7)。
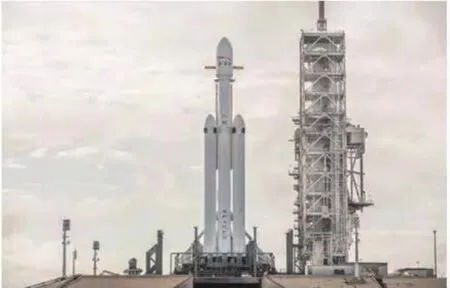
图6 SpaceX运载火箭

图7 SpaceX任务过程
SLS航天运输发射系统 (图8)采用了在线故障诊断与在线轨迹规划技术,可执行定时、定姿、定点入轨条件或其他终端约束,可在任意两级间加入一个滑行段并进行优化,根据出现故障严重程度的不同,力争进入预定轨道或进入安全轨道 (图9)。
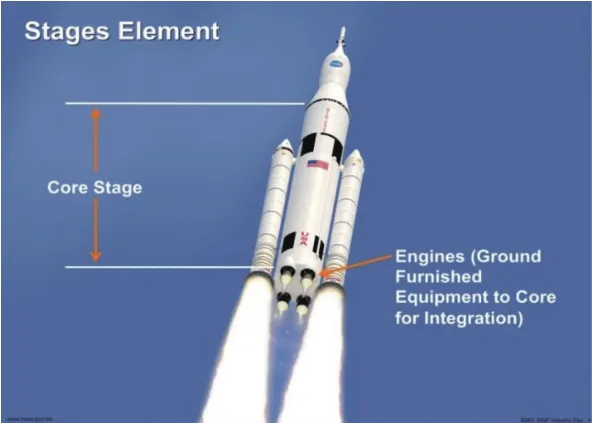
图8 SLS航天运输发射系统
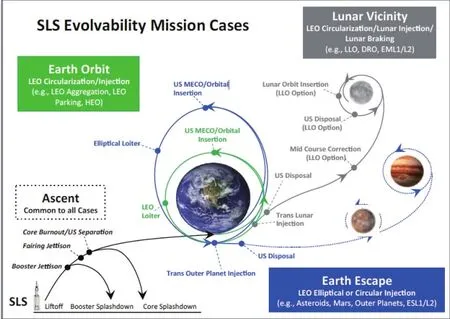
图9 SLS任务过程
纵观国外智能航天器发展历程,可以看出:
1)国外航天器人工智能技术研究主要集中在图像识别、故障诊断、任务决策与规划、在线制导等方面,在航天器控制中应用较少;
2)国外航天器人工智能研究领域主要集中在深空、遥感、在轨操控、集群、运载等,具备一定的自主识别、判断与任务规划能力;
3)国外航天器人工智能研究水平目前处于弱人工智能阶段,尚不能真正实现推理、思考和解决问题。
2.2 国内发展现状
2017年7月8日,我国颁布了 《国务院关于印发新一代人工智能发展规划的通知》,提出了发展人工智能的战略态势、总体要求、重点任务、资源配置、保障措施、组织实施,同年在科技创新2030重大项目中新增 “人工智能2.0”。
在深空领域,嫦娥三号软着陆任务中,从着陆器携带的降落相机获取的降落影像序列,图像质量清晰连续,为着陆点精确定位提供了保障;嫦娥三号巡视器探测过程中,地面根据传回的图像确定巡视移动策略和路径,每项探测任务均在地面远程遥操作的控制方式下完成[13-15]。
在遥感领域,航天星图科技有限公司创建了GEOVIS 5空天大数据承载与智能服务平台,将空天大数据、云计算与人工智能技术深度融合,提高了遥感数据处理能力和智能化水平。
在在轨操控领域,上海航天控制技术研究所研制的卫星制导与控制系统具备一定的在线自主路径规划能力;中国空间技术研究院联合哈尔滨工业大学等于2016年完成国际首次人机协同在轨维修任务验证,完成了插拔电连接器、旋拧螺钉等试验[16]。
在集群领域,上海航天控制技术研究所正在开展七星集群五种协同观测任务的自主规划研究。
在运输故障诊断中,运载火箭已经实现了基于阈值的故障诊断,并在中国运载火箭技术研究院研制的长征二号F运载火箭上得到了充分应用,关于自动或智能化的故障诊断技术研究较多。
在运输任务重规划中,目前我国轨迹优化方法均为地面离线生成,对在线轨迹规划方法理论研究较多,尚未开展工程应用。
2.3 国内外航天器智能技术发展对比
在战略方面,国内外均认识到人工智能的重要性并制定了发展规划,形成清晰的领域发展路线;在技术方面,美国是目前人工智能发展大国,航天器智能化水平处于Level 5,中国人工智能技术刚刚起步,航天器智能化水平处于Level 2~3,相比之下存在较大的差距 (表1)。
表1 国内外航天器智能技术发展分析对比
3 航天器人工智能技术发展建议
着力发展AI+深空、AI+遥感、AI+在轨操控、AI+集群、AI+故障诊断、AI+实时重规划、AI+智能芯片,利用人工智能提升航天器系统性能,实现空间技术水平跨越式发展。
3.1 AI+深空
在欠人工监督的远地天体表面环境中,巡视器探测的目标通常仅呈现弱特征,因此必须充分利用巡视器有限的寿命与数据采集能力实现科学目标的自主识别与复杂地形的自适应探索,使得巡视器具备类似人脑的智能决策能力。针对深空探测中常见的可见光与LiDAR组合,利用深度学习技术的高级抽象特征自学习能力,采用主动强化学习方法实现对深空弱特征目标的自主识别与探测,自主实现对深空弱特征目标的类别识别与位置检测,解决在复杂未知环境下非自主探测带来的探测范围有限、探测效率低的问题 (图10)。
重点解决的问题包括:
1)完善弱特征深空环境感知体系研究,建立深空弱特征目标数据集库;
2)突破基于增强神经网络的特征感知增强技术,实现光电信息融合特征智能提取算法。
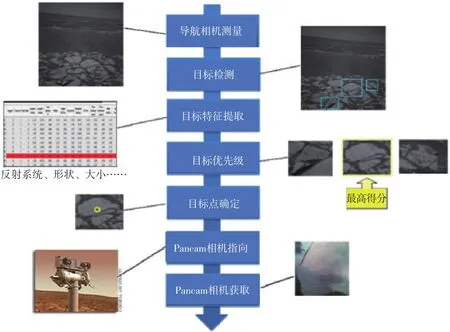
图10 MER自主探测系统工作流程[6]
3.2 AI+遥感
将深度学习和强化学习应用到遥感目标探测识别和路径调整中,采用提升神经网络和虚拟支持向量机等技术提升识别准确率,使遥感卫星能够在线实时处理遥感数据,根据数据的分析结果进行探测模式切换、观测参数切换以及遥感数据智能处理、传输,以实现多星组网后脱离地面运行控制系统支持的在轨全自主智能探测[17],解决人工判读与规划带来的效率低、突发事件响应慢的问题。进一步地,未来可构建用户模型驱动的遥感信息智能服务体系,实现主动准确地满足用户个性化需求 (图11)。
重点解决的问题包括:
1)在成像时间、观测角度、光照条件以及成像传感器各异的情况下,利用数据驱动多层神经网络深度学习技术,开展异源图像的智能匹配与识别,实现对突发事件的在轨高精度实时检测;
2)机动过程多约束条件下强化学习智能路径最优规划,完成航天器在轨智能姿态路径寻优。

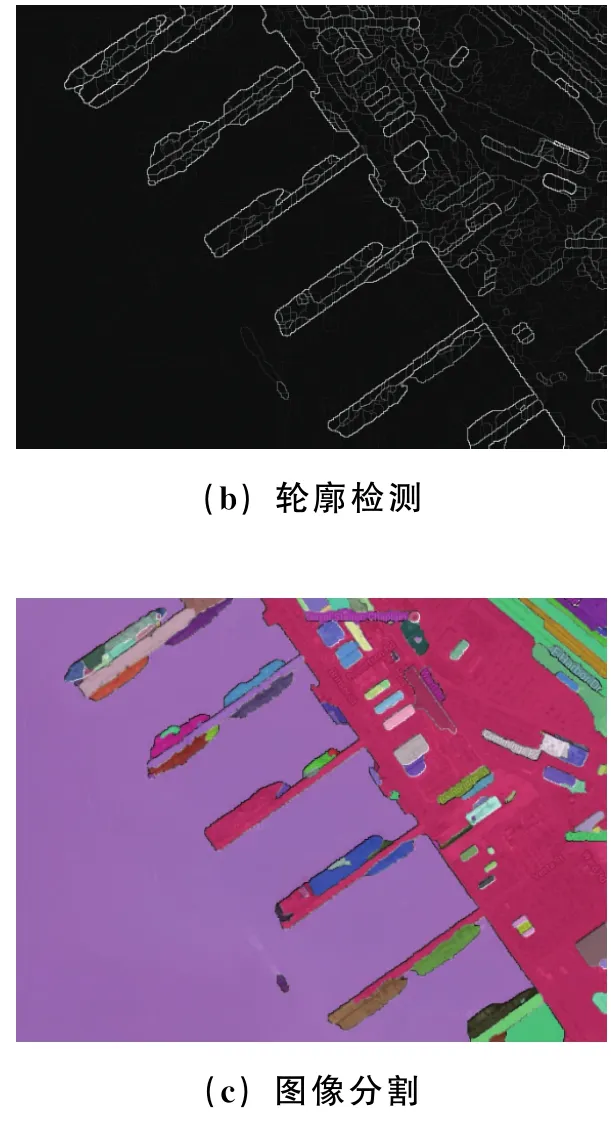
图11 遥感图像智能检测识别
3.3 AI+在轨操控
空间机器人具有对未知非合作目标的空间感知、机动接近和操作的能力,首先能够在地面遥控下自主完成故障模块更换、在轨加注、轨道清理、在轨装配等任务,后续逐渐发展为无人参与的全自主智能的在轨操控 (图12)。需要解决复杂环境下空间目标智能识别、动态障碍规避与大角动量柔顺传递、多臂协同自主精细操作、基于视触融合的异类信息智能感知等关键技术。
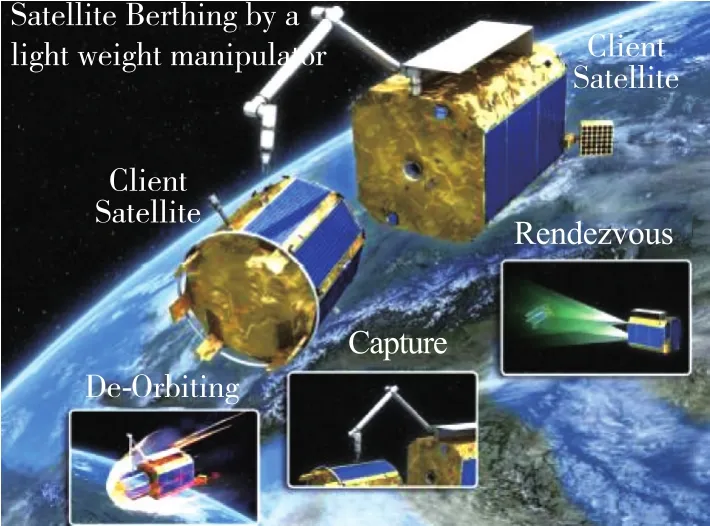
图12 地球静止轨道卫星在轨操控任务过程
重点解决的问题包括:
1)将深度学习和迁移学习等人工智能方法引入未知空间目标的自主识别中,提高复杂环境下非合作目标光学成像与测量的自适应性、准确性和鲁棒性。首先突破复杂环境下合作目标多过程动态特征自学习技术,完成合作目标关键部组件识别模型的神经网络训练。再针对合作目标与非合作目标不变特征关联性分析模型和深度神经网络参数自适应迁移模型进行研究,完成基于迁移学习的非合作目标识别。
2)将智能行为规划理论与方法应用到翻滚目标的安全自主逼近与抓捕任务中,使航天器能够准确地感知自身状态和外部环境并进行任务路径规划和柔顺捕获控制。建立翻滚目标高精度运动模型 (含空间摄动和目标章动),完成动态障碍规避任务规划及路径设计;解决抓捕过程中未知参数自适应下的器臂耦合干扰、大角动量柔顺传递。
3)针对空间多臂协同操控任务,将每条机械臂看成一个智能体,实现多机械臂运动过程中的协同、避撞和精确操控。机械臂通过传感器自主感知环境,基于多智能体的控制方法智能决策与规划每条臂的相对运动序列,实现多臂的一致性协同运动;采用人工势场法构造每条机械臂和目标的引/斥力场,搜索势函数的下降方向,以帮助机械臂寻找避障路径。
4)基于视触觉信息采集系统,采用触觉序列的卷积神经网络算法,使用压力传感器采集手指按压不同目标物的数据,建立训练和测试数据集,从而提炼反映不同目标物特性的基于时空维度的重要触觉特征信息,实现目标特征参数的精确获取[18]。
3.4 AI+集群
航天器集群系统具有分布式的感知与执行器,更好的容错性和鲁棒性,能够更有效地完成单个智能体无法完成的任务。要求集群系统在去中心的环境下仅利用有限的个体感知能力进行决策与协调,以消除个体冲突、实现系统级合作目标 (图13)。
重点解决的问题包括:
1)针对大规模紧密集群,解决满足构型控制需求的效率最优种群拓扑结构建立问题;
2)基于区域相对定位技术,解决卫星集群的相对测量问题;
3)研究大规模蜂拥集群智能聚集控制技术,研究解决视觉盲区、控制受限、链路时延、个体差异等约束下的群体行为规划和控制。
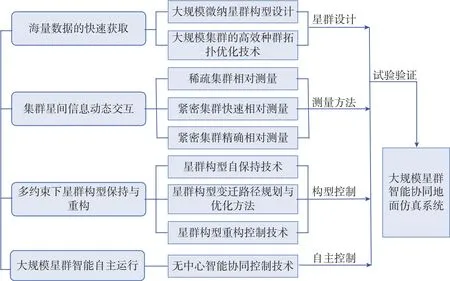
图13 智能集群关键技术
3.5 AI+故障诊断
根据系统采用的特征描述和决策方法的差异,形成了不同的故障诊断方法,应用于航天器故障诊断的方法有很多种,其中应用较多的有:基于模型的方法、基于信号处理的方法和基于人工智能的方法[19],人工智能是故障诊断领域发展的重点。故障自主诊断与重构专家系统用于没有精确数学模型或很难建立数学模型的复杂系统,专家系统不仅要解决闭环系统故障的诊断,更重要的是对故障的预测及处理,以及对突发新故障的诊断。引入基于专家系统的智能诊断技术,构造多层人工神经网络模型,根据大量的历史数据针对系统进行训练及测试,用于后续故障预警和故障源识别查找,解决在轨故障判别效率低、突发故障定位不准确、缓变故障预警不及时等问题 (图14)。
重点解决的问题包括:
1)根据历史在轨数据建立故障诊断知识库、推理机、动态数据库以及知识获取子系统;
2)根据航天器故障多具有随机性、多层次性和非线性的特点,利用现有数据库,完成专家系统的神经网络训练;
3)开发集故障诊断、状态监测、健康评估、故障预测于一体的航天器健康管理系统。

图14 故障检测隔离和恢复 (FDIR)功能框图[12]
3.6 AI+实时重规划
航天运输系统飞行任务越来越复杂,突发状况下传统的离线规划方法很难满足飞行需求,这在很大程度上要求制导方法必须具备自主应对各种飞行状况的能力,将自主规划技术应用到运载火箭飞行控制中,可解决发动机推力下降、异常关机等突发状况,提升飞行任务的成功率和系统的可靠性。
美国SLS重型运载火箭采用的制导方法可以在故障下通过自主规划进入一个安全轨道等待救援。俄罗斯专家也认识到先进的制导方法能够提高任务可靠性,另一个值得关注的趋势是端对端的任务规划,即考虑从火箭起飞到飞行器进入最终轨道的全过程,不再采用预先序贯式分段的设计方法,强调全程整体优化[20]。
重点解决的问题包括:
1)将实时轨道规划的多约束问题转化为数学描述问题;
2)目前算法普遍存在初值敏感、收敛慢、实时性差等问题。
结合国外的研究,基于凸优化描述的实时重规划是解决上述问题的有效途径之一,后续可重点关注该技术的发展和开展相关的技术研究 (图15)。

图15 实时重规划基本流程图
3.7 AI+智能芯片
下一代智能计算是一种面向性能、节能、容错的智能计算技术。利用任务运行的态势进行实时决策、实时全系统重构,为智能飞行控制系统提供一种动态自适应的软硬件环境,提高飞行控制计算平台的性价比,从而充分利用系统的全局计算资源,相对非智能计算的系统架构,能耗与计算效能得到提升,为智能飞行控制需要运行的复杂智能算法提供高效、优化的软硬件运行环境、开发和测试验证环境。此外,可以在系统出现故障时,对系统进行动态重构,提高系统的可靠性,为飞行控制故障处理提供计算上的保障 (图16)。以专为机器学习打造的TPU处理器为例:
1)推理性能:TPU平均比CPU和GPU快15~30倍。实时决策、实时全系统重构,为智能飞行控制提供神经网络/深度学习的动态自适应环境;
2)运算效率:TPU脉动阵列架构,处理卷积比较高效,性能功耗比CPU/GPU高30~80倍,满足Google神经网络应用的99%时间需求。

图16 智能计算系统框架
4 小 结
人工智能作为一项引领未来的战略技术,其出现对传统航天具备较强的赋能作用,是不容错过的跨越式发展时机,人工智能与航天结合的时代已经到来。将人工智能引入到航天器系统中,给航天器装上大脑,将使航天器具备自感知、自学习、自决策、自执行、自适应能力,提高航天器对空间复杂任务自主适应的能力。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
国际太空(2022年7期)2022-08-16
舰船科学技术(2022年11期)2022-07-15
国际太空(2022年2期)2022-03-15
建材发展导向(2022年2期)2022-03-08
航天器工程(2022年1期)2022-02-21
一重技术(2021年5期)2022-01-18
房地产导刊(2021年6期)2021-07-22
国际太空(2019年9期)2019-10-23
领导决策信息(2018年16期)2018-09-27