
智能点钞机接钞机构的模态分析
2018-04-16 03:03龚志奔杨洪澜熊日伟李日华
机械制造 2018年2期
□ 龚志奔 □ 杨洪澜 □ 熊日伟 □ 李日华
1.厦门荣力机电有限公司 福建厦门 361009
2.齐齐哈尔大学 机电工程学院 黑龙江齐齐哈尔 161006
3.广东硕泰智能装备有限公司 广东中山 528403
1 研究背景
智能点钞机是一种自动清点纸币数目和识别伪钞的机电一体化装置,具有结构紧凑、使用方便、效率高等优点,在市场上得到广泛应用[1]。我国银行出纳柜台的现金处理工作相当繁重,而市场上一些点钞机经常会出现振动大和飞钞现象,严重影响了出纳的工作效率。点钞机在点钞过程中振动噪声较大,长期近距离操作,对操作人员也会产生不同程度的身体影响[2]。为此,笔者围绕智能点钞机的上述问题展开研究。目前,关于点钞机的技术研究主要集中于纸币识别和控制系统,而对于结构的研究则相对较少。针对点钞机存在的问题,笔者对接钞机构进行振动模态分析,并提出避免产生共振的方法。
2 智能点钞机工作原理
智能点钞机的主要功能是实现纸币的清点和真伪验别。纸币清点功能主要由接钞光电检测、红外计数检测、报警蜂鸣器及各个连接模块数码管等实现。纸币真伪验别功能主要由金属安全线检测、磁性检测、红外穿透检测、荧光检测及其它假钞辨别传感器等实现[3]。
智能点钞机结构如图1所示,主要由捻钞机构、出钞机构、接钞机构、数字显示器等部分组成。点钞机对入钞口的纸币开始捻钞时,捻钞机构的胶圈首先捻走首张纸币,位于下方的纸币被阻力橡皮粘住阻止前进,使首张纸币与下方纸币分离。整个过程不间断往复进行,直至最后一张纸币捻完。纸币脱离捻钞胶圈转入出钞机构的出钞胶圈,出钞胶圈以两倍于捻钞胶圈的速度将连续输送来的纸币按顺序与后面的纸币有效分隔。计数器与检测传感器对进入的纸币依次精确计数和辨别真伪,并通过数字显示器显示。查验后的纸币分别卡入爪轮的不同爪齿间,爪齿卡着纸币按顺序堆叠整齐[4]。
智能点钞机的接钞机构是引发飞钞现象和振动问题的主要部件,也是直接展现点钞机性能的核心部件,为此,笔者主要对接钞机构进行建模及有限元振动模态分析。
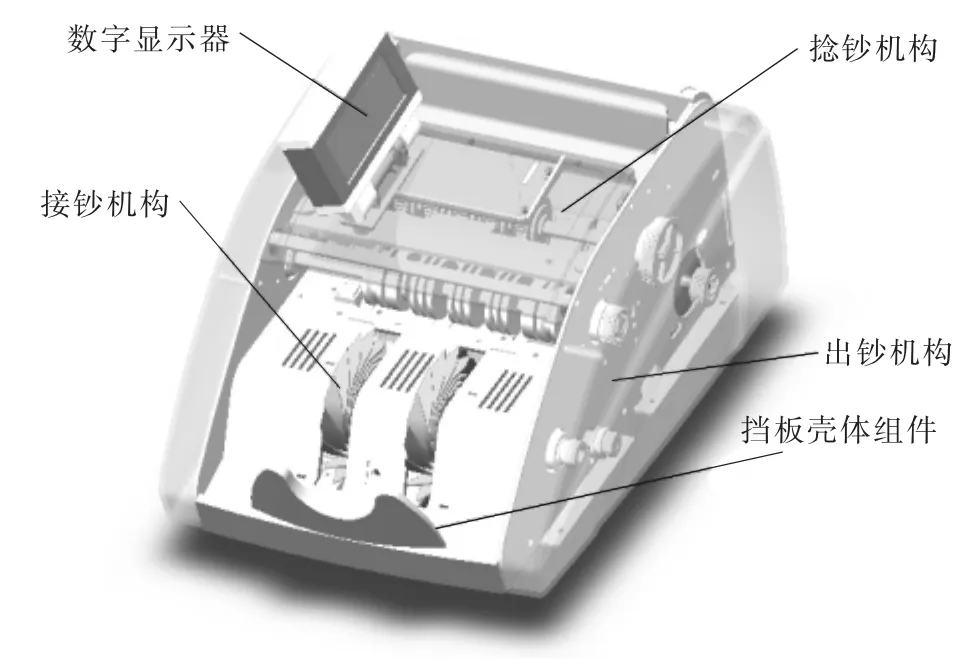
▲图1 智能点钞机结构
3 接钞机构有限元建模
3.1 几何模型
SolidWorks是机械建模的主流软件[5],具有较好的二次开发接口和扩充性,提供了上百个设计应用程序函数接口,其中,对象链接与嵌入技术、组件对象模型技术等应用程序接口有利于二次开发的实现,为精确曲面实体参数化建模和虚拟装配提供了便利。MATLAB是一款具有强大功能的数据处理软件[6],能快速对复杂曲面展开数据计算处理,生成笛卡尔坐标点数据矩阵,将数据矩阵导入SolidWorks,转换为点轮廓,再生成序列曲线,通过曲线拟合生成相应的曲面实体,可高效完成三维几何建模。
爪轮是接钞机构的关键部件,其外形精度要求较高,对点钞机的振动与飞钞现象会产生直接影响。为此,基于参数化设计方法进行建模,采用MATLAB参数化设计绘制爪轮精准外廓曲线,导入SolidWorks进行二次曲线曲面开发,应用曲面实体化技术生成接钞机构的三维实体模型,如图2所示。
3.2 材料力学特性
在SolidWorks中建立接钞机构实体模型后,将其无缝连接导入ANSYS Workbench,然后分别设置接钞机构各部件的材料属性,见表1。

表1 接钞机构部件材料属性
3.3 模型网格划分及约束载荷
在ANSYS Workbench中将转轴与爪轮的约束设置为接触绑定,采用六面体网格对导入的接钞机构模型进行网格划分,网格质量等级为0.75,得到接钞机构的有限元模型,如图3所示。接钞机构转轴在实际工作中,轴两端由轴承支承,因此在轴两端施加支撑约束,然后依次添加爪轮与轴的质量载荷。
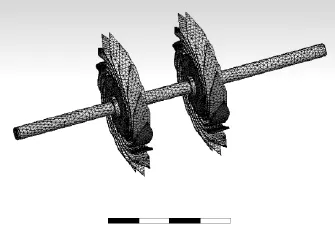
▲图3 接钞机构有限元模型
4 模态分析
4.1 理论基础
在模态分析中,可将机械结构看成一个多自由度的振动系统[7],机构本身具有多个固有频率,在不同固有频率下表现为不同的多个共振区。一个多自由度线性系统的运动微分方程为:

式中:[M]、[C]、[K]依次为系统质量矩阵、结构阻尼矩阵及刚度矩阵;{q}为系统位移向量;{}为系统振动速度向量;{}为系统振动加速度向量;{F(t)}为系统激励向量。
当振动系统处于一个大气压下时,空气阻尼对结构的固有频率影响可以忽略[8]。机械振动模态固有属性由自身的结构特性和材料特性所共同决定,与外界载荷无关[9]。 因此,可将式(1)简化为无阻尼自由振动系统的微分方程:

假设以下形式:

式中:φi为振型特征向量;ωi为振型固有频率。
将式(3)代入式(2),化简为:

当φi=0时,无需求解零阶振型,则式(4)可表示为:

其特征方程为:

展开式(6)中的行列式,可获得关于ωi2的n阶次多项式,这个多项式的根,即为相应的结构固有频率。
4.2 分析流程
有限元分析中的子空间迭代法,是目前针对机械结构大型广义特征值进行问题求解时应用广泛且可靠的一种解法[10]。因此,笔者采用子空间迭代法提取模态,再通过有限元软件强大的广义特征值处理功能,进行接钞机构的振动模态分析计算。接钞机构的模态分析流程如图4所示。
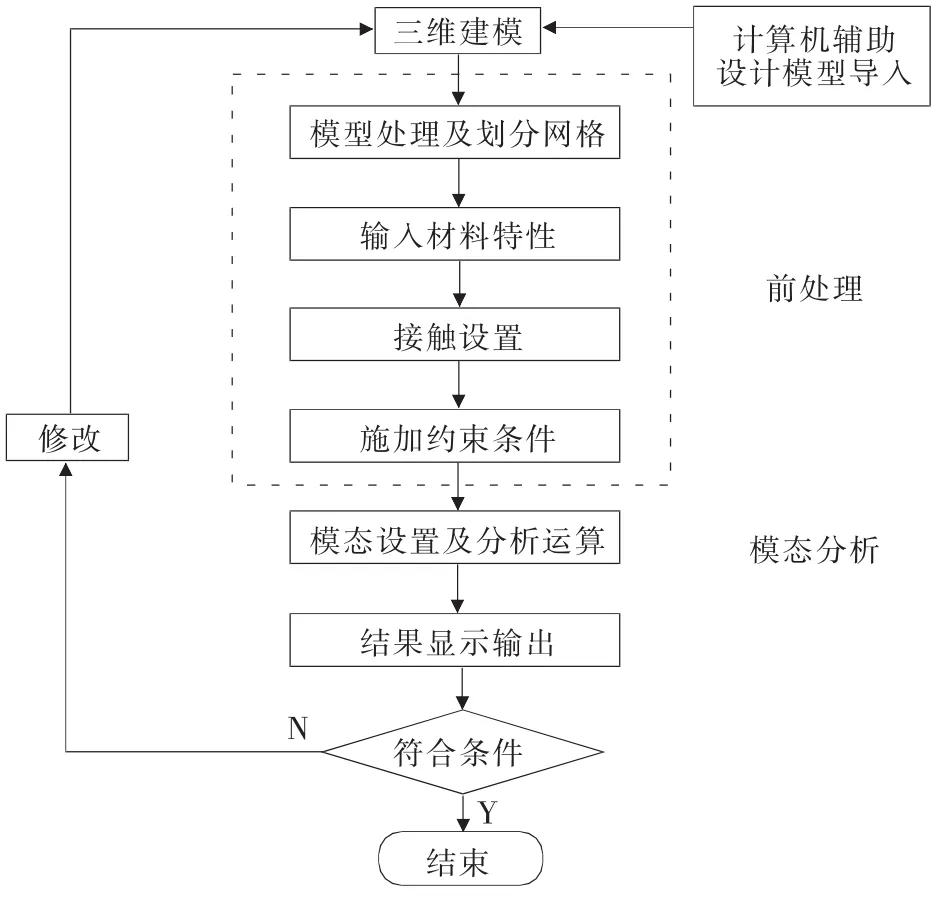
▲图4 接钞机构模态分析流程
4.3 计算结果
智能点钞机接钞机构的前四阶振型如图5~图8所示。前四阶振型的固有频率及对应的最大变形量见表2。

表2 接钞机构前四阶振型固有频率及最大变形量
由图5~图8可得到智能点钞机接钞机构的前四阶振型特征。
接钞机构一阶振型的振动变形主要发生在转轴上,转轴中部沿着Y轴、Z轴方向呈凸形,且发生弯曲变形。爪轮变形集中在爪的尖端位置,变形沿轴径方向逐步增大。
接钞机构二阶振型的振动变形依然集中在转轴上,转轴中部沿Y轴、Z轴方向呈凹形,且发生弯曲变形。爪轮的变形集中于爪尖端,相对于一阶振型,变形量增大,整个爪轮呈现径向散开变形。
接钞机构三阶振型的振动变形主要发生在爪轮上,爪轮变形集中于爪尖端,且呈现向外伸展的态势。相较一阶、二阶振型,转轴的变形程度趋近于0。
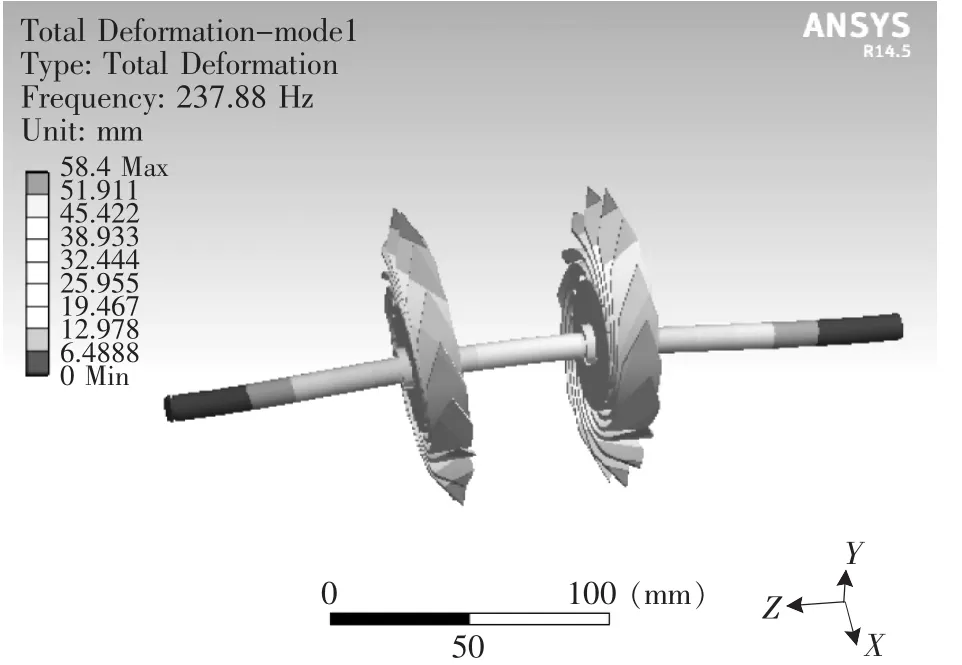
▲图5 接钞机构一阶振型
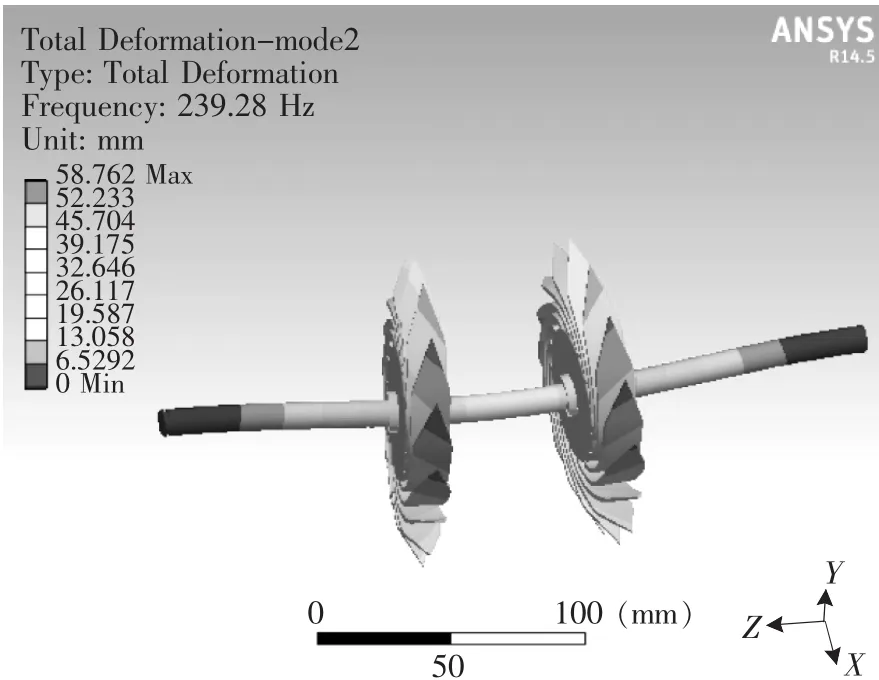
▲图6 接钞机构二阶振型
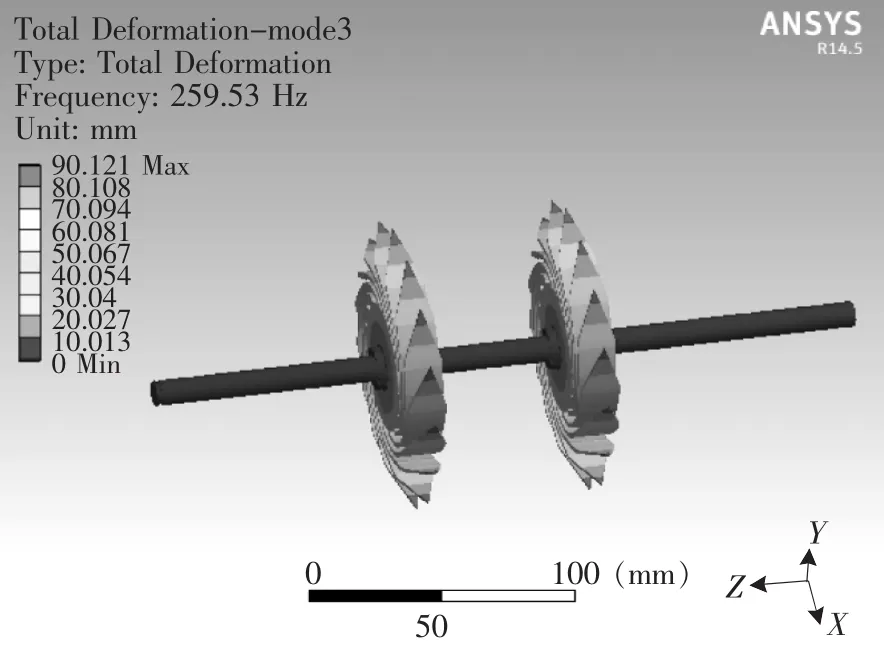
▲图7 接钞机构三阶振型
接钞机构四阶振型的振动变形和三阶振型相似,转轴振动变形微小,可以忽略不计。主要变形集中发生在爪轮上,爪的尖端相对于一阶至三阶振型而言变形剧烈。相对于前三阶振型,整个爪轮四阶振型呈现为散开向外伸展变形。
由一阶、二阶振型可知,接钞机构的转轴因振动引起较大的变形,会使整个接钞机构在工作时产生振动,甚至发生工作异常。由三阶、四阶振型可知,爪轮沿转轴中心直径方向越远,变形就越大。爪轮呈现为散开向外伸展变形,爪轮中心远离转轴,因纸币卡入爪轮过浅,会导致飞钞现象发生。
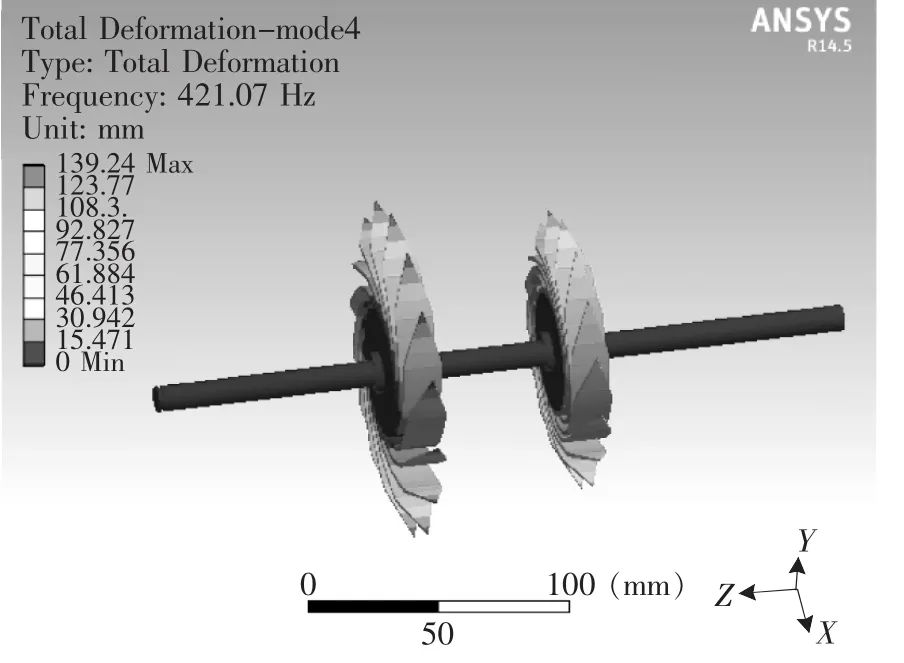
▲图8 接钞机构四阶振型
4.4 结构调整
由上述分析可知,智能点钞机的工作频率应避开接钞机构的固有频率,避免发生共振现象。但现有智能点钞机的最大工作频率为300 Hz,工作频率在接钞机构的固有频率区域中,会产生共振现象。因此,一方面可将智能点钞机的工作频率设定在100 Hz左右,避开表2中的各阶固有频率,从而避免发生共振;另一方面可对接钞机构的结构参数进行调整,将转轴外径增大1 mm,将爪轮叶与中心的偏角向内侧偏移0.5°。
调整后进行振动模态分析,得到前四阶振型的固有频率,见表3。由表3可知,接钞机构结构参数调整后前四阶振型的固有频率均远离最大工作频率,从根本上避免了共振现象的发生。

表3 结构参数调整后前四阶振型固有频率 Hz
5 结论
在智能点钞机接钞机构模态分析过程中,笔者对模型进行了有效网格划分与约束,取得了良好效果,并获得接钞机构的前四阶振型及固有频率。由振型图可知,接钞机构一阶、二阶振型的振动变形发生在转轴上,位置在中部,沿Y轴、Z轴方向呈凸形和凹形的弯曲变形;接钞机构三阶、四阶振型的振动变形发生在爪轮上,呈现为径向散开向外伸展变形。
通过调整智能点钞机接钞机构的结构参数,使接钞机构各阶次振型固有频率避开最大工作频率,从根本上避免了共振现象的发生,提高了智能点钞机的可靠性和使用寿命。
[1] 卜研,王开和,李光,等.点钞机机壳模态分析与降噪研究[J].天津科技大学学报,2006,21(1):58-60.
[2] 刘连浩,罗安,王加阳,等.智能型点钞机的研制[J].机电一体化,2003,9(l):11-13.
[3] 李光,王开和,卢学军,等.点钞机噪声源的识别[J].天津科技大学学报,2004,19(2):44-47.
[4] 冯济琴,吴敏,王先全,等.基于FPGA的智能点钞机设计与实现[J].重庆工学院学报(自然科学版), 2009,23(5):94-97.
[5] 张涛,姚金杉.基于SolidWorks的展开放样技术在压力容器制造中的应用[J].机械研究与应用,2016(6):123-124.
[6] 刘万春,刘光磊.基于MATLAB和Pro/E的弧齿锥齿轮三维造型[J].机械制造,2008,46(7):18-20.
[7] 龚志奔,朱鸿彬,张琳.单螺杆压缩机转子振动模态分析[J].日用电器,2015(9):72-75.
[8] 于涛,张海燕,温龙.基于ANSYS Workbench的航空电子机箱模态分析[J].机械制造,2013,51(3):24-26.
[9] 胡世军,王恩广,刘学,等.基于ANSYS Workbench的数控滚齿机立柱模态分析[J].机械制造,2015,53(6):19-21.
[10]曹树谦,张文德,萧龙翔.振动结构模态分析——理论、实验与应用[M].天津:天津大学出版社,2001.
猜你喜欢
数学物理学报(2022年3期)2022-05-25
兰州交通大学学报(2022年2期)2022-04-26
数学物理学报(2021年6期)2021-12-21
结构工程师(2020年2期)2020-06-17
华东师范大学学报(自然科学版)(2020年6期)2020-01-11
特种结构(2019年2期)2019-08-19
数学学习与研究(2018年5期)2018-03-28
小学生必读(低年级版)(2018年11期)2018-03-13
同济大学学报(自然科学版)(2018年1期)2018-02-08
读写算·小学低年级(2016年9期)2016-05-14
