主动质量阻尼器控制方式在电梯振动控制中的应用研究
2018-04-16 08:35俞英杰
装备机械 2018年1期
□ 俞英杰
上海三菱电梯有限公司 上海 200245
1 研究背景
随着电梯运行速度越来越快,空气湍流、导轨不平产生的外部激励越来越大,直接导致轿厢内振动加大,影响乘客乘坐的舒适感[1]。传统的电梯减振方式主要为在导靴侧或轿厢、轿架间增加弹簧或橡胶等,属于被动减振方式[2-3]。对于低速运行的电梯而言,由于激励幅值小,采用被动控制方式可以取得显著的减振效果。但是随着运行速度的加快,外部激励幅值大幅增加,传统被动减振控制方式将无法进行有效控制[1]。
因此,针对电梯振动,要采用主动控制方式。主动控制方式与电梯的被动减振系统无关,通过在电梯系统中引入与激励方向相反的主动控制力,从而达到抑制振动幅值的作用。
电梯振动的主动控制主要采用电磁力控制[5-6]和主动质量阻尼器(AMD)[7]控制两种方式。AMD控制结构简单,成本较低,但响应时间较慢。电磁力控制主要以电磁主动导靴的形式进行主动控制,结构复杂,成本高,但是由于具有快速响应的特性,因此,可以更高效、精确地对外部激励进行抑制。
笔者主要探讨AMD控制方式,通过简化模型、仿真计算,分析AMD控制方式在电梯振动控制中应用的效果及可能存在的问题。
2 AMD控制原理
AMD控制结构主要由三部分构成:伺服电机、可动质量块、滚珠丝杠。伺服电机带动滚珠丝杠旋转,从而推动可动质量块沿着滚珠丝杠的轴向方向来回运动[8-9]。
为了分析AMD控制原理,忽略电梯竖直向与前后向的振动,将电梯模型简化为一维方向的受力模型,如图1所示。图1中,M为轿厢系统质量,k、c分别为轿厢系统与导靴间的刚度和阻尼,m为AMD控制结构中可动质量块的质量,X0为导轨处产生的位移激励,XG为轿厢产生的位移,Xa为AMD系统可动质量块产生的位移,θa为伺服电机产生的滚珠丝杠转动角速度,Fa为轿厢对AMD可动质量块的作用力,Fa’为AMD可动质量块对轿厢的作用力,即主动控制力,FW为由导靴处传入的外部激励力。
当外部输入一个位移激励X0,使整个轿厢受到一个向右的力FW,进而产生了位移XG。如果此时安装在支撑框架上部的AMD动作,使可动质量块也产生一个位移量Xa,Xa=XG+XF,XF为由伺服电机推动可动质量块相对于轿厢运动其中产生的位移,可动质量块受到伺服电机产生的推力同时由于反作用力的关系,轿厢系统受到一个反向的力与外部的激励力FW方向相反,从而可以起到抑制轿厢系统振动的作用。
对于外部的位移激励信号X0,通过求解力平衡方程,可以得到相应的主动控制力通过联立伺服电机的回转运动方程,可以得到伺服电机电压U、轿厢加速度响应的关系。因此,可以通过控制伺服电机达到抑制轿厢振动的目的[10-11]。
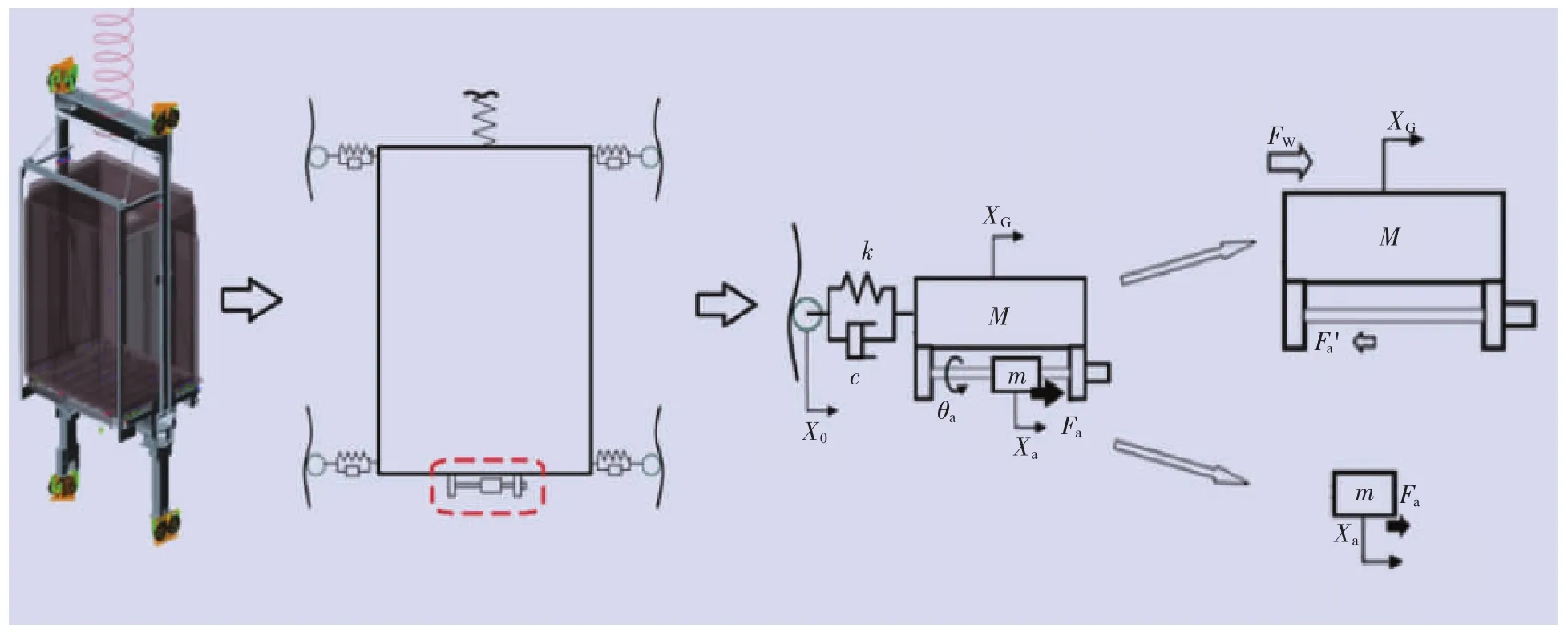
图1 电梯受力模型
3 仿真计算
3.1 模型简化
应用MSCADAMS软件,建立简单的仿真模型,如图2所示。将支撑框架和轿厢室的质量相加,简化为一体,即图2中大方块部分。将导靴视为一体,即图2中小方块部分。在导靴侧采用位移激励,模拟由于导轨不平产生的横向激励。
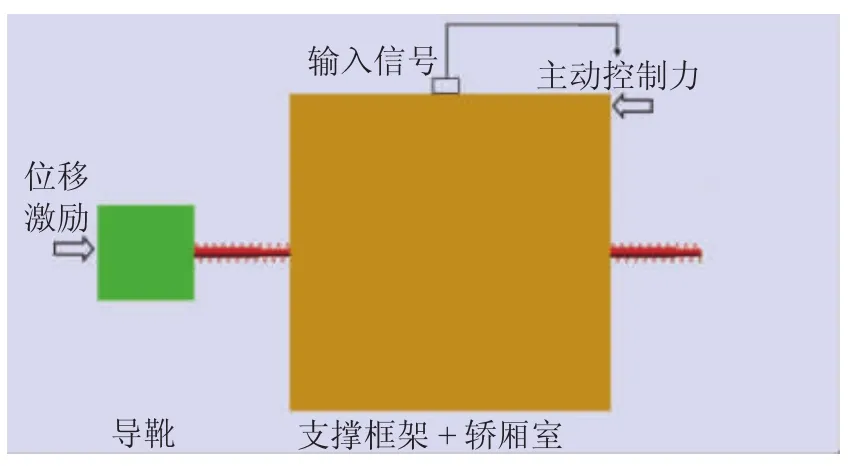
图2 MS CADAMS简单仿真模型
3.2 输入信号相位影响分析
采用单频正弦信号作为激励,主动控制力分别采用与输入信号同相位、反相位,计算结果如图3~图6所示。
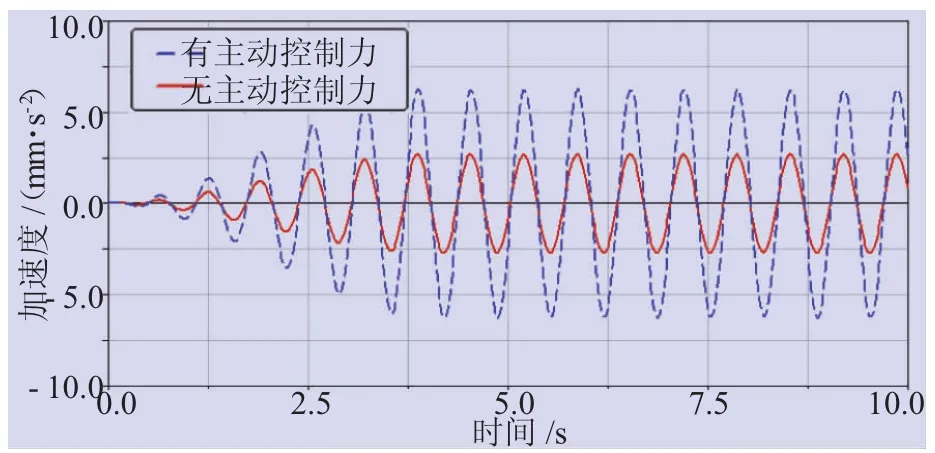
图3 主动控制力与输入信号同相位时加速度响应曲线
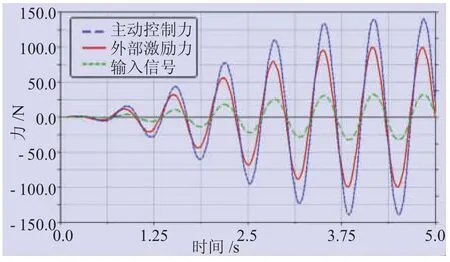
图4 主动控制力与输入信号同相位时对比曲线
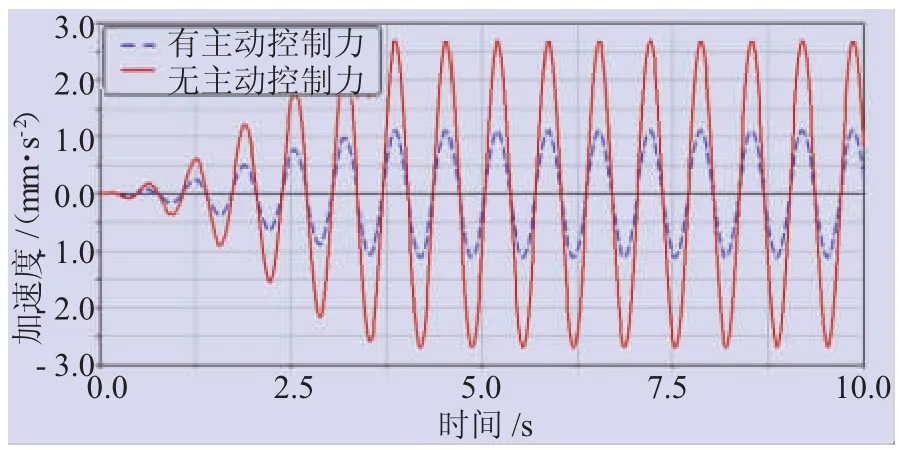
图5 主动控制力与输入信号反相位时加速度响应曲线

图6 主动控制力与输入信号反相位时对比曲线
由图3~图6可知,主动控制力与输入信号同相位时,主动控制力与外部激励力也为同相位,从而导致振动被进一步放大。主动控制力与输入信号反相位时,主动控制力与外部激励力也为反相位,实时抵消外部激励的影响,轿厢室的振动幅值明显下降。
由于AMD的可动质量块由伺服电机所驱动,因此当外部激励频率较高时,相位不断变化,为了抵消外部激励,所输出力的相位也要随之变化。此时,伺服电机的响应速度有可能无法跟上外部激励的相位变化,反而有可能造成振动幅值的增大。可见,AMD控制结构的响应速度,即伺服电机的响应速度是影响AMD控制效果的重要因素。
3.3 主动控制力大小影响分析
主动控制力大小对轿厢减振效果有很大的影响。如图7、图8所示,改变控制因数α,主动控制力与外部激励力的大小越接近时,系统所受到的合力越小。根据公式可知,合力FW+Fa越小,轿厢系统的加速度也就越小。由此可以发现,AMD控制的本质就是通过主动控制力抵消外部激励力的影响,从而达到减振的目的。如果主动控制力过大,则可能成为新的激励源,使振动变大。
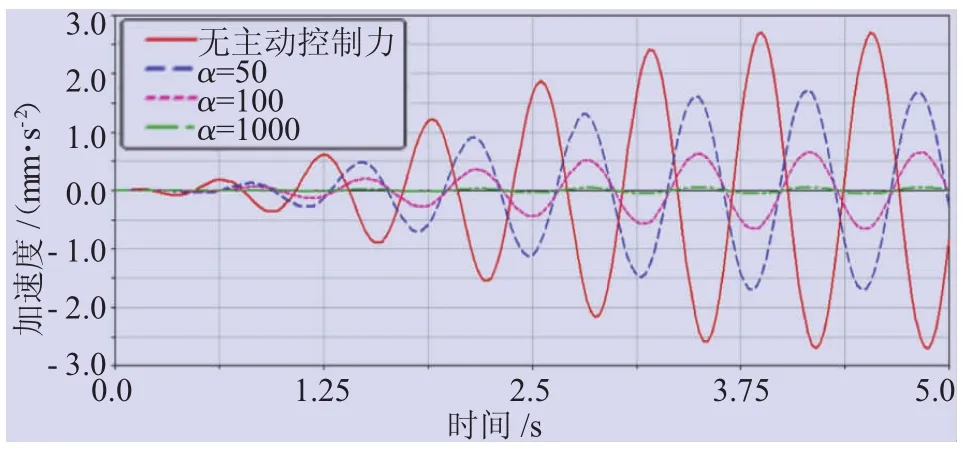
图7 不同控制因数时加速度响应曲线
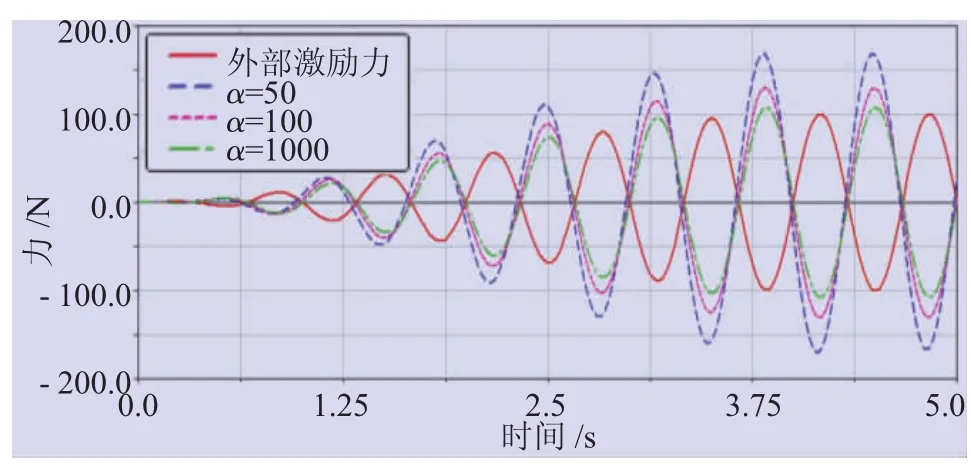
图8 不同控制因数时外部激励力与主动控制力对比曲线
3.4 位移随机激励仿真计算
采用位移随机激励输入,再次进行仿真,分析在振动幅值、频率、相位随机变化时,采用AMD控制轿厢的振动响应情况,如图9~图12所示。
当主动控制力和输入信号为同相位时,主动控制力与外部激励力为同相位,且不发散,此时情况与正弦信号激励时不同,加速度响应幅值不仅没有增大,而且反而有所衰减。
当主动控制力和输入信号为反相位时,主动控制力与外部激励力为反相位,主动控制力抵消外部激励力,使轿厢室的加速度响应幅值有大幅度下降。当外部激励力很小时,只需要给予一个很小的力,便可以取得很好的减振效果。当外部激励力很大时,只需要增大AMD可动质量块的质量和伺服电机的输出功率,同样可以取得很好的减振效果。
主动控制的实质是力的抵消,即通过主动控制力抵消外部激励力。根据图9~图12,当最后系统趋于稳定,由于偏载作用而存在一个恒定静力并导致系统位移不为0时,若要AMD控制结构仍然提供一个反方向的控制力,这显然是不可实现的。AMD控制本质是由伺服电机推动可动质量块时产生对支撑框架的反作用力,由于可动质量块的行程有限,这一反作用力不可能恒久存在,因此采用位移控制,对于偏载情况显然会出现可动质量块超出行程的问题。可见,在采用位移控制时,控制因数α不能为一个常数,应该在系统接近稳定时使控制因数α变为0。
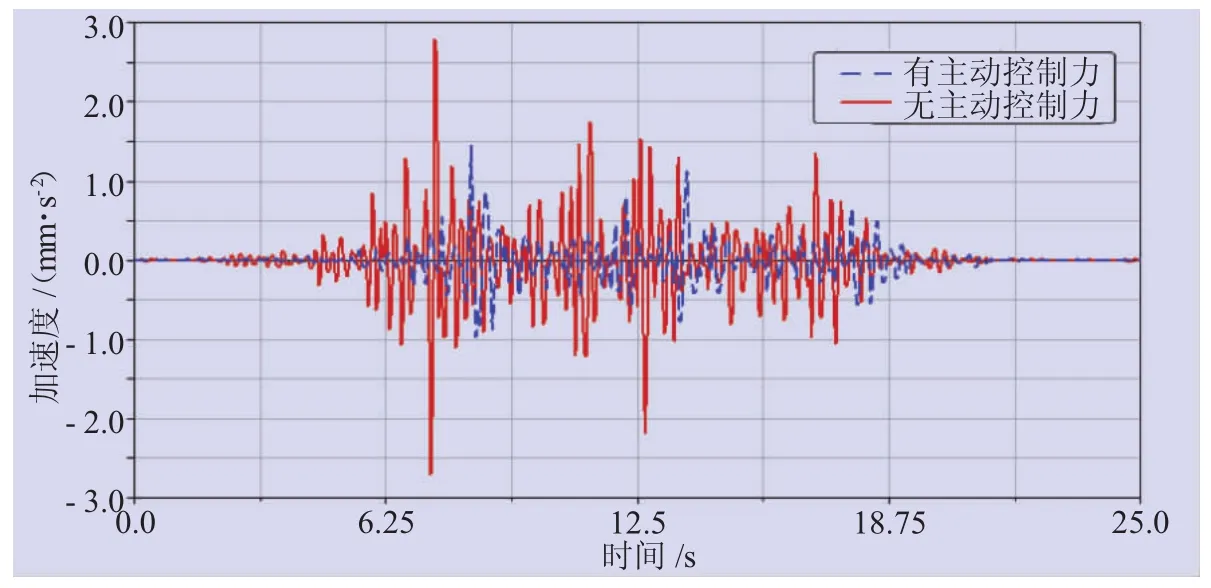
图9 位移随机激励下主动控制力与输入信号同相位时加速度响应曲线
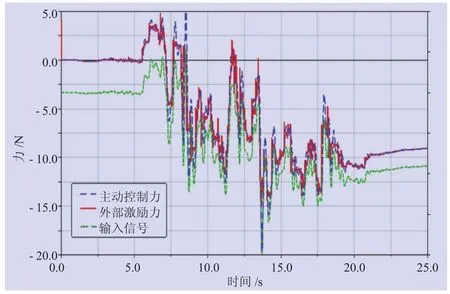
图10 位移随机激励下主动控制力与输入信号同相位时对比曲线
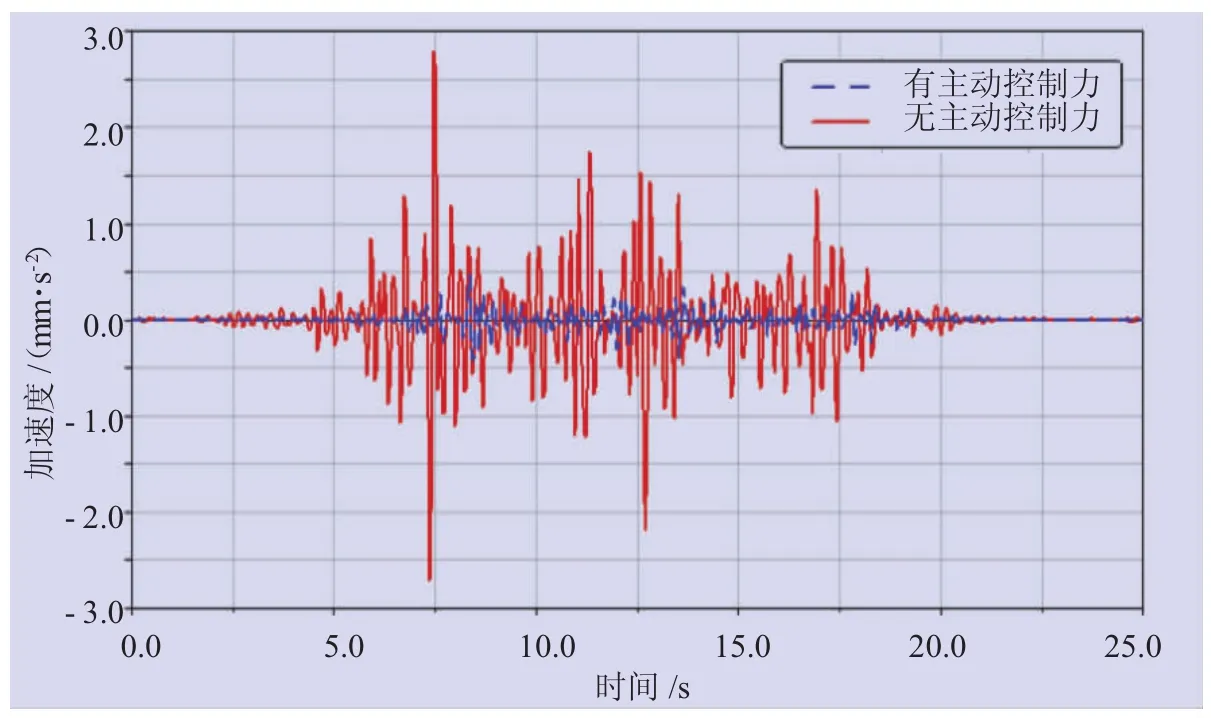
图11 位移随机激励下主动控制力与输入信号反相位时加速度响应曲线

图12 位移随机激励下主动控制力与输入信号反相位时对比曲线
4 总结
AMD控制的本质是用一个主动控制力来抵消外部激励力,从而抑制轿厢系统的振动响应,达到减振的目的。改变控制因数,使主动控制力与外部激励力的大小越接近,系统所受到的合力就越小,系统的振动响应幅值也就越小。
AMD可动质量块由伺服电机驱动,当外部激励频率较高时,相位迅速发生变化,为了抵消外部激励,所输出力的相位也要随之变化。此时,伺服电机的响应速度有可能无法跟上外部激励的相位变化,进而有可能造成振动幅值的增大。
当采用反相位输入信号进行控制时,主动控制力与外部激励力方向相反,可以有效抑制轿厢系统的振动幅度。
对于位移输入控制,当系统最后由于偏载作用而存在一个恒定静力并导致系统的位移不为0时,AMD控制结构为了抵消由于偏载而产生的作用力,仍然需要提供一个恒定的反方向控制力。由于AMD控制结构的行程有限,通过惯性力来提供一个恒定力显然是不可实现的。因此,在采用位移控制时,控制因数不能为一个常数,应该在系统接近稳定时使控制因数逐渐变为0。
[1] 马烨.高速电梯气动特性研究[J].装备机械,2013(2):47-48.
[2] 吴慧,叶文华,沈言,等.高速电梯垂直振动建模与实验分析[J].机械制造,2013,51(4):19-22.
[3] 王磊,冯永慧,薛金莲.基于Aduc7026的高速电梯液压主动导靴控制系统设计[J].机械制造,2011,49(7):25-29.
[4] 严济宽.机械振动隔离技术[M].上海:上海科学技术文献出版社,1986.
[5]廖小波.高速电梯水平振动实验系统设计及主动控制仿真研究[D].上海:上海交通大学,2005.
[6]NOGUCHI N,ARAKAWA A,MIYATA K,et al.Study on Active Vibration Control for High-Speed Elevators[J].Journal ofSystemDesign and Dynamics,2011,5(11):164-179.
[7] 豊嶋順彦,上村晃生,永井正夫,その他.AM Dによる超高速エレベータの振動制御(第1報,最適制御理論による検討)[J].日本機械学会論文集(C編),1999,65(637):3479-3485.
[8] 豊嶋順彦,上村晃生,永井正夫,その他.AM Dによる超高速エレベータの振動制御(第2報,実機模擬試験)[J].日本機械学会論文集(C 編),2000,66(647):2181-2186.
[9]刘川.直线电磁驱动AMD主动减振控制系统的研究[D].哈尔滨:哈尔滨工业大学,2007.
[10]卞永明,金晓林,泰利升.集装箱桥吊吊具的电子主动防摇装置试验研究[J].振动、测试与诊断,2005,25(4):292-295.
[11]徐洋,华宏星.AMD结构主动控制系统的建模研究[J].振动与冲击,2008,27(5):79-80.
[12]李惠,铃木祥之,吴波.AMD控制结构地震反应的试验研究[J].振动工程学报,1999,12(2):223-228.
[13]冯永慧,张建武.高速电梯水平振动模型的建立与仿真[J].上海交通大学学报,2007,41(4):557-560.
猜你喜欢
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
家庭影院技术(2020年6期)2020-07-27
中国特种设备安全(2019年8期)2019-10-14
中国特种设备安全(2019年4期)2019-05-20
中国特种设备安全(2019年2期)2019-04-22
铁道通信信号(2019年1期)2019-03-21
大经贸(2017年11期)2018-01-08
商场现代化(2016年12期)2016-06-06
企业导报(2016年10期)2016-06-04
科教导刊·电子版(2016年11期)2016-06-03