铧式犁表面仿生改进的优化研究
2018-04-14 05:01赵玉山陈成展安超杰郑旭强
吉林农业科技学院学报 2018年1期
邓 涛,常 影,赵玉山,陈成展,安超杰,郑旭强
农业生产过程中,最主要的一项工作就是耕地,耕地质量也在很大程度上影响农作物的生长的好坏[1-3]。但是由于老式铧式犁在泥土潮湿的条件下工作时粘连土壤,会影响工作的效率以及耕种的效果[4]。因此通过现代仿生的技术手段,对大自然中的蜣螂进行形体仿生,克服老式铧式犁的粘连泥土的缺点,并根据现有的CATIA建模以及分析技术,对得到的模型进行静力学实验分析,比较不同凹凸表面以及不同凹凸面连贯方式的铧式犁的工作结果,得到铧式犁凹凸表面模型[5]。
1 CATIA在建模中的应用
在建模过程中,CATIA提供了可改变的变量及参数,来实现优化建模的目标,通过历史树可多次对已经完成的模型进行修改和实验,CATIA软件还提供了用于直观查看的曲面设计分析工具可直接对模型进行修改设计[6]。利用CATIA软件进行新式铧式犁表面的优化设计,对于凹凸面的选择以及犁体、犁壁的设计有先进的优点,并将可以多次在CATIA软件中对模型修改,以实现新式铧式犁的总体创新建模设计。
2 铧式犁的仿生设计
在铸造铧式犁时,考虑到犁壁的耐磨不够、耐用等特性,除了犁体本身,一般使用耐磨图层、多层钢制夹板先进技术制成[7]。传统的铧式犁表面虽然整体光滑,但对于粘连的泥土不能很好地清除掉,导致耕种工作的效率低下。吉林大学邓石桥在仿生犁壁的研究过程中,分析了螳螂表面的突起形状,且研究表明,螳螂的凸起形状适合在土壤中运动,而且较为圆滑[4]。因此,应用CATIA软件对铧式犁的建模就可以得到较为合理的铧式犁模型。按照蜣螂的圆滑表面进行仿生设计,改进铧式犁的表面凹凸[8]。
3 实验过程
3.1 建模过程
根据蜣螂表面的圆滑凸起特性,发现不同的凸起对铧式犁有不同的工作结果,文中选取蜣螂光滑凸起的半径为26 mm,并且选取凸起高度为3 mm[9]。在田间实验过程中发现,含有此凸起的铧式犁,可以提高脱土率的0.9%~2%,提高生产效率20.5%[9]。应用CATIA软件,在前人的基础上进行研究,建立了半球形蜣螂表面的仿生凸起模型。如图1所示。
铧式犁的凸起,按照先建立铧式犁犁体曲面,逐步建立犁壁、犁铧的过程。采用的是水平直圆线的建模方式,研究过程中采用新式犁体BTU35型[10]。在CATIA软件中应用相关命令功能建立基础线,其中底边长度为280 mm,底边与第一斜边夹角为40°,最大圆弧半径为400 mm,如图2所示。利用肋的命令第一斜边作为轮廓曲线,边界竖直线作为边界线,沿着圆弧扫略出铧式犁犁体曲面[11]。
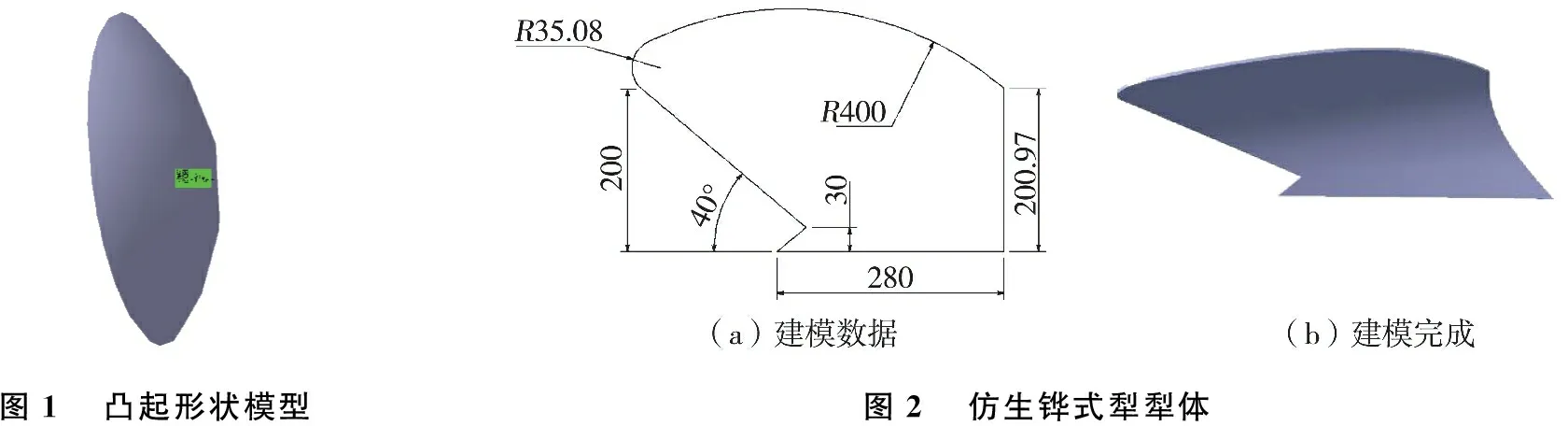
图1凸起形状模型图2仿生铧式犁犁体
完成犁体的建模,设计仿生非光滑犁壁平面时,凸起单元坐标参考了吉林大学的李建桥、金俊等人研究成果[9,12]。输入凸起点坐标如图3,把凸起按照坐标的形式联系在一起,用X,Y作为坐标,保证每个凸起按照xy的坐标数据进行建模设计,仿生铧式犁的三维模型如图4所示。
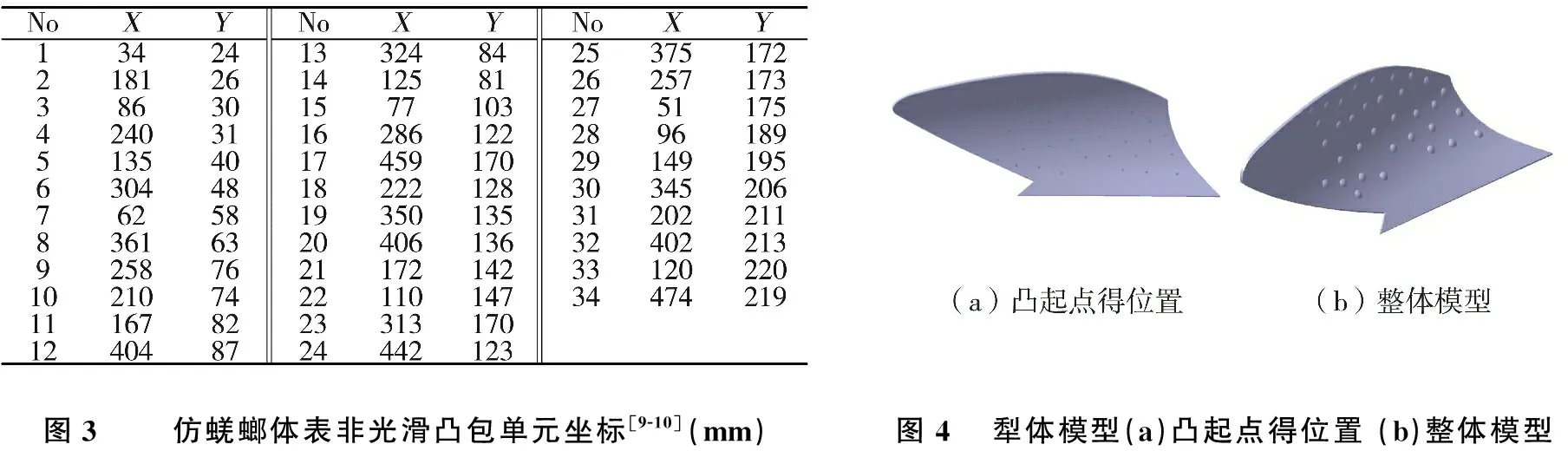
图3 仿蜣螂体表非光滑凸包单元坐标[9-10](mm)图4犁体模型(a)凸起点得位置(b)整体模型
4 分 析
4.1 模型的处理
在CATIA中建立模型,设计耕幅100 mm,设计耕深240 mm,建立一个长宽高为2 000 mm×200 mm×320 mm的土壤模型,保存为stp文件,导入Sliodworks软件中,把仿生铧式犁模型格式另存为xt文件。然后再新建一个ANSYS LS-DYNA分析将转换格式模型导入,得到分析模型。

表1 铧式犁体材料属性参数
4.2 土壤切削模型参数设置
(1)单元类型。根据现有的研究成果,犁体模型和土壤模型均设置为solid164单元。
(2)材料属性。犁体材料选用16Mn[10],材料属性如表1。
结合犁体在运动中的作用,将犁体设置为刚体,这样不仅能提高精度还能大大缩短运算时间,根据犁体实际运动的情况限制犁体在Y和Z方向的移动和X、Y、Z方向的转动,如图6。
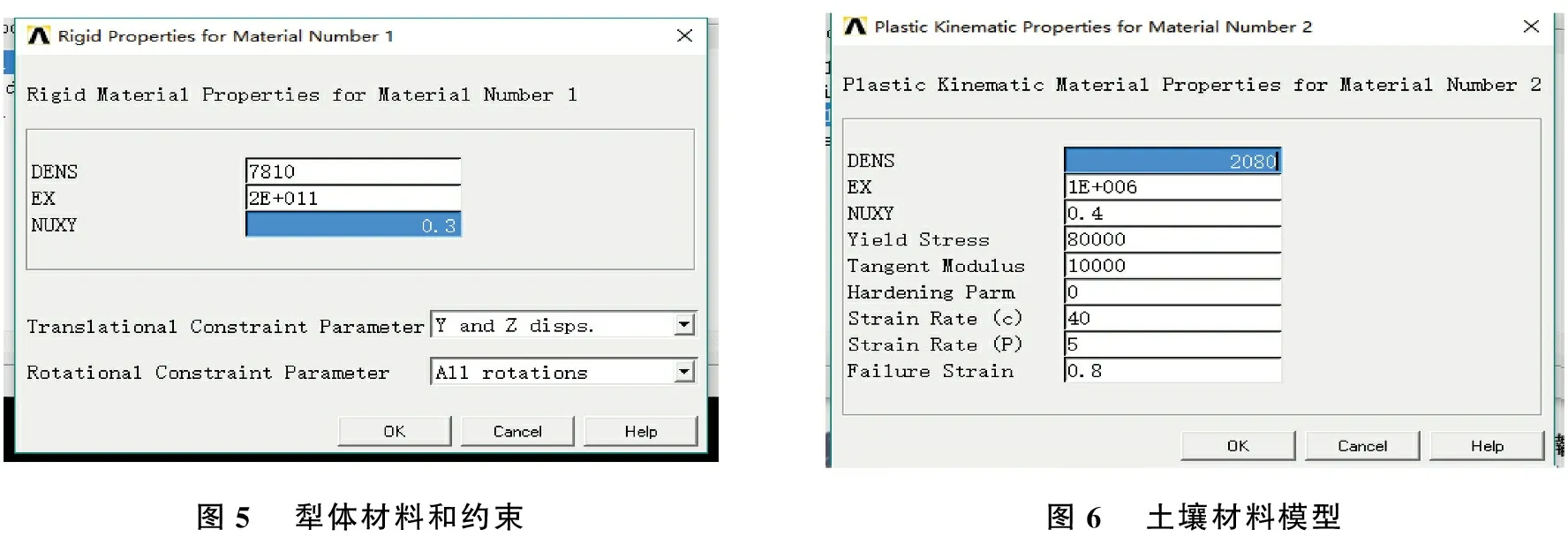
图5犁体材料和约束图6土壤材料模型
根据土壤物理及力学特性对其采用塑性随动模型;其材料参数如下土壤密度ρ2=2.08×103kg/m3,弹性模量E2=1.0×106,泊松比μ2=0.4,土壤屈服应力σ=0.08×106Pa,切线模量Ev=0.01×106Pa,失效应变Sf=0.8,应变率c=40,p=5。
(3)网格划分。由于犁体模型形状较为复杂,对其只能采用自由网格划分[13],对于仿生犁体模型采用智能尺寸8级精度,形状规则的土壤条采用扫略网格划分,网格数量采用控制边长法。图7为犁体曲面划分好的网格形状。
(4)定义接触。在整个犁体运动中犁面和土壤属于侵蚀的过程,所以定义犁曲面和土壤之间的接触为面—面侵蚀接触(ESTS),并将犁曲面定位接触面,土壤定义为接触目标面[14]。
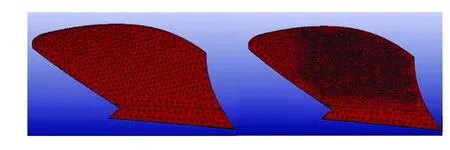
图7 (a)普通犁网格(b)仿生犁网格
(5)约束、载荷的设置。在耕翻过程中,被翻起土壤下面的土壤和犁体左侧的未耕土壤是固定不动的,因此需将土壤条模型的下底面和Y轴正方向的侧面的全部自由度约束住[15-16]。载荷设置为犁体以5Km/h沿着X轴方向切割土壤。在犁进入土壤之后,在土壤的阻力作用下,应该对时间和速度的相应关系进行定义,使得铧式犁在土壤中匀速的前进[15]。
(6)输出设置。输出文件选择LS-DYNA类型,可在LS-Prepost中处理,并将系统合力写入ASCII文件,用于输出接触面接触反力。全部参数设置完成,写入K文件以进行后续的处理。
4.3 结果分析
将K文件手动递交给ANSYS Mechanical/LS-DYNA,设置相关参数,启动运算。求解结束后,打开LS-DYNA后处理器LS-Prepost,读取包含整个模型绘图状态的D3PLOT文件,可显示犁体切割土壤的全过程如图8。
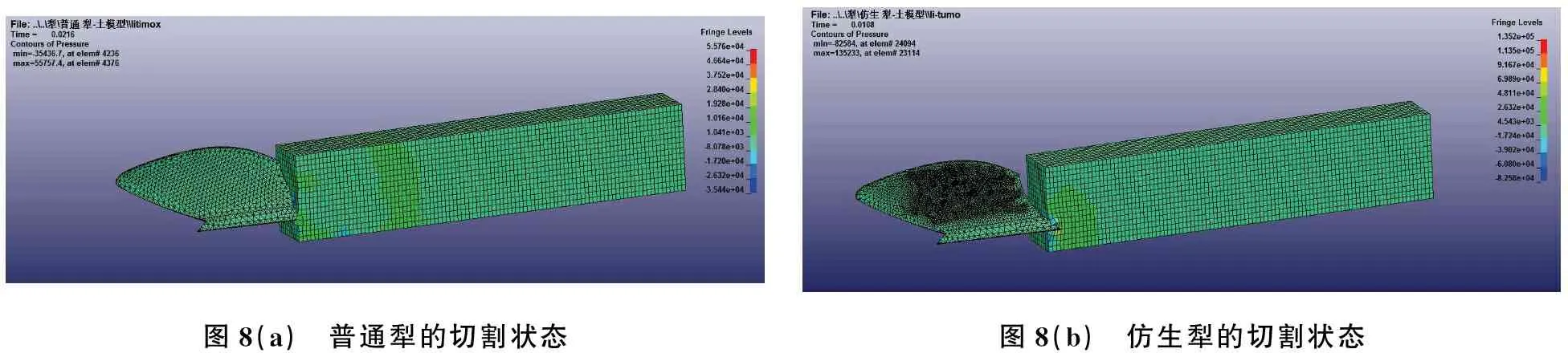
图8(a)普通犁的切割状态图8(b)仿生犁的切割状态
打开ASCII文件中的rcforce文件,可显示犁体的总耕作阻力随时间的变化曲线,如图9。第一条曲线的最大值635 N,第二条曲线的最大值为722 N,可以很清晰的看出仿生犁比普通犁降低阻力87 N。
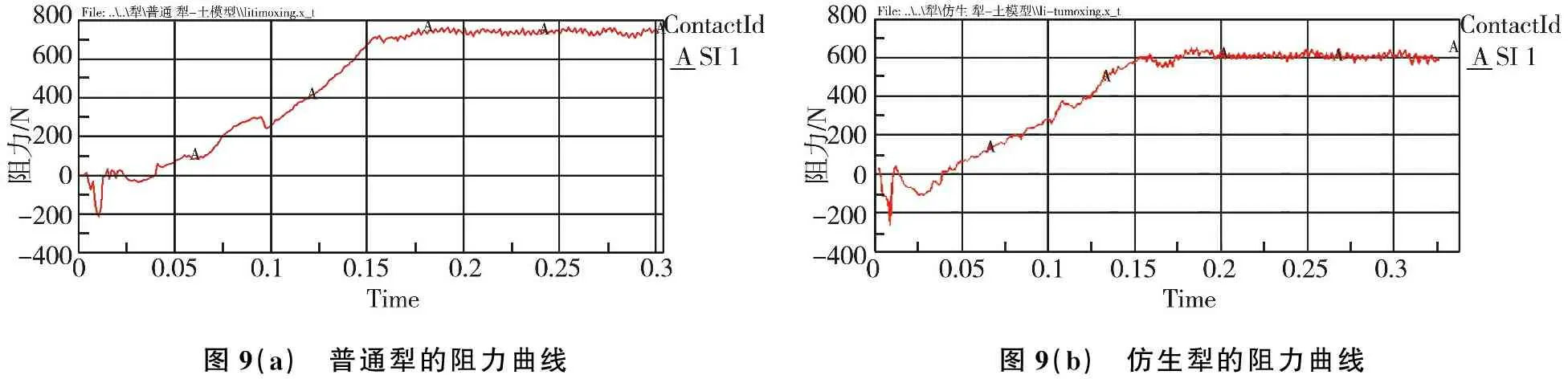
图9(a)普通犁的阻力曲线图9(b)仿生犁的阻力曲线
5 结 论
总结仿生犁的原理和仿生犁研究的情况,结合CATIA软件的特点对仿生犁进行建模。应用ANSYSLS-DYNA软件对普通犁和铧式犁分别进行划分网格和受力分析,仿真结果表明,在土壤中工作时,仿生铧式犁比普通铧式犁受到的阻力小87N。验证了本文的目标。仿生非光滑犁体曲面能够很好的降低耕作时的阻力。
参考文献:
[1] 刘兴波.深松机械化技术在农业生产中的重要意义[J].现代农业,2011(03):95.
[2] 左勇.农作土壤深耕深松机械化技术[J].湖南农机,2012,39(01):3-4.
[3] 赵文峰,赵峰,王攀.保护性耕作和深松技术装备[J].农机使用与维修,2013(10):27-29.
[4] 邓石桥.仿生犁壁的减粘机理及其仿生设计[D].吉林大学,2004.
[5] 赵永满,梅卫江.铧式犁犁体曲面设计研究现状与分析[J].农机化研究,2010,32(05):232- 235.
[6] 程顺才,马东辉,刘芳平,王文杰.犁体曲面的三维建模及曲面分析[J].湖南农机,2009,36 (09):17-19.
[7] 董新蕊.铧式犁领域重要专利技术分析[J].中国发明与专利,2014(02):51-57.
[8] 张金波.深松铲减阻耐磨仿生理论与技术[D].吉林大学,2014.
[9] 金俊,李建桥,张广权,等.仿生非光滑水田犁壁的设计及田间应用试验[J].农机化研究,2015,37(12):160-165.
[10] 徐锐良,刘美洲,郭志军,等.元线非直线型铧式犁几何与力学特性研究[J].农机化研究,2017,39(03):22-25+31.
[11] 冯涛,陈军,郭贵生,等.犁体曲面设计及数控加工研究[J].农机化研究,2010,32(11):83-86+90.
[12] 李建桥,李忠范,李重涣,等.仿生非光滑犁壁规范化设计[J].农机化研究,2004(06):119-121.
[13] 李庆龄.ANSYS中网格划分方法研究[J].上海电机学院学报,2006(05):28-30.
[14] 姜颖,杨坚,王芳.甘蔗深耕犁体曲面的动力学仿真[J].农业装备与车辆工程,2008(06):29-30+34.
[15] 姜颖.基于动力学仿真的犁曲面工作性能影响因素研究[D].广西大学,2008.
[16] 翟力欣.犁体结构与工作参数对流变型土壤耕作阻力的影响研究[D].南京农业大学,2011.
猜你喜欢
数学年刊A辑(中文版)(2022年1期)2022-08-20
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
作文新天地(初中版)(2019年6期)2019-08-15
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
数学大世界(2018年16期)2018-07-30
北京航空航天大学学报(2017年6期)2017-11-23
卷宗(2017年16期)2017-08-30
浙江大学学报(工学版)(2016年10期)2016-06-05
现代防御技术(2014年6期)2014-02-28