
采用能量管理策略的混联式混合动力汽车的建模与仿真
2018-04-09 05:56孙贵斌曹竞辉马腾腾杨云东
厦门理工学院学报 2018年1期
孙贵斌,曹竞辉,王 耀,马腾腾,杨云东
(1.厦门理工学院机械与汽车工程学院,福建 厦门 361024;2.福建省客车与特种车辆研发协同创新中心,福建 厦门 361024;3.厦门市福工动力技术有限公司,福建 厦门 361024)
2017年,世界气象组织公布的温室气体公报显示,当年全球二氧化碳的平均浓度达到了历史最高的水平。控制汽车尾气排放已经成为了汽车生产厂商以及社会各界迫在眉睫、亟需解决的一项任务[1]。新能源汽车成为汽车发展趋势。纯电动汽车由于电池的技术瓶颈,其发展受到了制约。而油耗低、排放少、续航长的混合动力汽车则成了新能源的最佳过渡车型。目前,混合动力汽车的构型一般分为串联式(series hybrid electric vehicle,SHEV)、并联式(parallel hybrid electric vehicle,PHEV)和混联式(parallel-series hybrid electric vehicle,PSHEV)3种[2]。由于混合动力汽车存在两个动力源,意味着混合动力汽车有多种能量分配方式和工作模式,需要一套较为复杂的控制策略来协调整车能量的分配。
现阶段,混合动力汽车的整车控制方法主要有2种:一种是基于规则的方法,如逻辑门限值、模糊控制;另一种是基于优化的方法,如:庞特里亚金最小值、动态规划等。连静等[3]使用基于逻辑门限值的方法对并联式混合动力汽车进行研究,文章利用Cruise软件搭建整车模型,利用Matlab/Simulink建立逻辑门限值算法,实现了对并联式混合动力系统的仿真,并降低了油耗,维持了电池荷电状态(state of charge,SOC)的平衡。杜玖玉等[4]使用基于规则的逻辑门限值的方法对液压混合动力系统进行研究,把发动机MAP图分为3个区域,根据不同的工作点划分汽车的工作模式,以实现对车辆的控制。LIN Chanchao等[5]采用了动态规划算法能量管理策略,把既定的循环工况离散为N个阶段,选取电机转矩和变速器档位指令作为控制变量,电池荷电状态和变速器档位作为状态变量,得出了混合动力汽车的最优控制变量,但是动态规划算法受到工况的制约,计算量大,难以应用到实际。本文利用Matlab/Simulink建立混联式混合动力汽车的整车模型,把混合动力汽车工作模式分成4种,基于逻辑门限值的思想建立了能量管理策略,简化了现有汽车的仿真模型,缩短了混合动力汽车开发过程的前期阶段,并通过在城市道路和市郊道路两种工况下进行仿真,对汽车性能进行对比分析,验证汽车模型的正确性和控制策略的有效性。
1 混联式混合动力汽车动力系统结构

PSHEV结合了串联和并联的优点,结构采用了行星齿轮作为动力耦合装置,综合了串、并联的组成比例。混联与并联相比,增加了一个发电机设置;与串联相比,增加了发动机与变速机构的机械连接,但是混联式混合动力的动力系统质量和体积都较小,能够提供和传递优于其他方案的驱动功率和系统效率。PSHEV可以拥有更多的驱动模式,能适应不同的行驶工况需求,并且在一部分工况下可以实现“零排放”[6]。本文采用混联结构中最具代表性的丰田普锐斯THS-II第二代汽车动力系统结构作为研究对象,其结构示意图如图1所示。
2 混联式混合动力汽车整车模型的建立
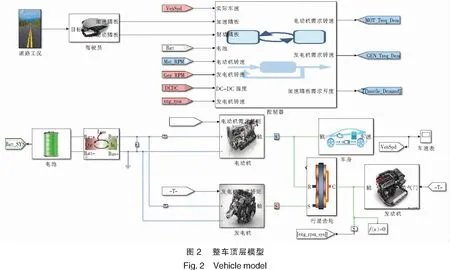
PSHEV的Matlab/Simulink整车顶层模型如图2所示,其中子模块包括:drive cycle模块、driver模块、control模块、engine模块、motor模块、generator模块、battery模块、gear模块和vehicle模块。整个PSHEV系统的信号流从路面循环工况开始传递。驾驶员根据道路需求和实际车速,将踏板命令值传递给控制器模块和车身模块。控制模块根据整车状态,将踏板信号转化成整车需求转矩合理分配给发动机、电动机和发电机。最后发动机模块和电机模块经过行星齿轮模块将实际转矩值输出到车身模块。
整车主要参数如表1所示。

表1 整车主要参数Table 1 Main parameters of the vehicle
2.1 整车动力学模型
整车动力学模型主要考虑车辆的纵向动力学。与传统燃油车的整车传动系统基本类似,模型输入为整车驱动力矩和制动踏板信号,输出为车速信号值。计算主要依据轮胎的受力平衡建立汽车行驶方程式,得出实际车速。
(1)
(2)
式中:Ff为滚动阻力;Fi为爬坡阻力;Fj为加速阻力;δ为汽车旋转质量换算系数;Fw为空气阻力;Cd为空气阻力系数。
2.2 道路循环工况模型和驾驶员模型
为了模型更贴近真实,道路模块采用了具有代表性的城市道路工况FTP75和高速公路工况HWFET,设置驾驶员模型来模拟实际行车中驾驶员响应。整车模型由循环工况给出目标车速,驾驶员模块控制实际车速,对目标车速进行跟随。驾驶员模块设置一个PID控制器,其输入为需求车速值Vdem和实际车速值V,通过比较两者的差值,计算输出加速踏板开度信号值α和制动踏板的开度信号值β,其计算公式[7]为

(3)
(4)
式中:α为加速踏板开度;β为制动踏板开度;Vd为需求车速;V为实测车速。
2.3 发动机模型

由于发动机的工作过程相当复杂,建模时许多情况基于假设,大部分参数难以测得,采用理论建模有一定困难,所以现在多通过台架测试数据导入,通过数学模型拟合建立发动机的稳态特性模型,其缺点是发动机在实际行驶中多处在不稳定工况,台架测试所测数据仅限于发动机的稳态工况[8]。但所得的模型计算结果值偏差不明显,对本文主要讨论的整车经济性能影响不大。
在发动机台架实验中,可以得到一系列发动机转速对应的转矩、油耗、功率等数据,把数据制成三维MAP图,通过式(5)(6)(7)计算数据,建立表格来拟合插值计算某一工况下的电子节气门开度、转矩输出、燃油消耗率等;式(8)为发动机燃油消耗计算公式。本文所建模型的发动机MAP图如图3所示。
(5)
(6)
be=f(Te,Ne),
(7)
(8)
式中:Vf为燃油消耗量,单位为L;ρf燃油密度,单位为g/L;be发动机的瞬时油耗率,单位为g/kWh;P为发动机输出功率,单位为kW。
2.4 电机模块
电机采用内置式永磁式同步电机。内置式永磁式同步电机体积质量小,方便布置,并且效率高,响应快,转矩大,有较好的起动特性和过载能力。电机模型也是由电机实验数据导入建立的。通过实验所测得的数据,得到电机转速、转矩和功率的关系,建立电机的效率关系,其关系如式(9)所示。
ηg=f(Ng,Tg)。
(9)
式(9)中:ηg表示同步电机的效率;Ng表示实际电机转速;Tg表示实际电机转矩。
由电机转速和转矩查电机的三维效率图,求得电机输出功率。电机模块计算还包括汽车制动时的发电转矩,其计算公式[9]为
Tm=(T+(Tmmax-T)×Kbrake)×Kbatt。
(10)
式(10)中:Tm为电机发电转矩;T为滑行发电转矩;Tmmax为电机在当前转速下可产生的最大制动转矩;Kbrake为制动踏板信号强度(百分比);Kbatt为电池电量对发电的影响系数。
2.5 电池模型
电池模型采用镍氢电池。PSHEV对电池总容量的要求主要来自于持续的加速/爬坡工况和续航里程(纯电动模式)[10],电池容量过小会导致发动机频繁启动为其充电。电池模型实质上是简化的理想电池等效电路,电池荷电状态SOC计算公式如式(11)。
(11)
式(11)中:Q表示最大的电池容量,i表示充放电电流。
2.6 行星齿轮机构
行星齿轮结构是混联式混合动力汽车动力的关键传递装置,其结构包括太阳轮、行星轮、外齿圈、行星架。PSHEV的发动机与行星架相连,发电机与太阳轮相连,电动机和驱动轴与外齿圈相连[11]。PSHEV将会有多种不同的功率流向。发动机通过行星架将动力传递给外圈和太阳轮,发动机的扭矩可用来驱动混合动力汽车,一小部分驱动发电机向电池组充电。发电机可以直接用于给电池组充电,也可以驱动电动机,增加驱动力。行星齿轮采用Simscape预置模块搭建。
2.7 控制器模型
控制器模型的精确度直接关系到了车辆的性能。控制器模块接收到驾驶员的踏板信号,根据发动机、电机、电池等各个部件的状态反馈,经由整车控制策略的优化分配,得到各个驱动模块的目标转矩,驱动车辆使其运行在高效区,达到最佳的经济排放目的。结合电池荷电状态和发动机最优工作曲线模式,PSHEV采用规则的逻辑门限值控制策略,确定PSHEV运行模式的切换以及驱动发电模块需求转矩值的大小。
PSHEV中,发动机是主要动力源[12],发电机和电动机以平衡发动机运行负荷的形式提供动力。设计中应使发动机尽量减少在低效率区工作,取消其怠速工况,使发动机的工作沿着其最优经济性曲线。当车速达到30 km/h时,发电机才会作为起动机带动发动机启动。另一方面,PSHEV受到一定电池性能方面的制约。电池不允许过充电和过放电,为了提高电池寿命和能量转换效率,确保电池SOC在一定适宜范围内[13],电池工作在充放电内阻较低的区域,设置为0.3~0.8,即SOC低于0.3开启充电模式,SOC大于0.8禁止向电池充电。
基于上述策略设定,根据整车运行需要,把PSHEV的运行模式分为以下4种。
1)纯电动模式。当车速小于30 km/h,且电池SOC>0.3,此时可由电动机单独驱动汽车,汽车进入纯电动模式。
2)加速/爬坡模式。当汽车的需求功率或者负荷较大时,汽车进入加速/爬坡模式,发动机工作在最佳工作区间,和电动机一起驱动汽车。
3)巡航模式。当车辆的需求功率满足发动机的最优功率区间时,电动机不工作,汽车由发动机单独驱动。
4)制动模式。当驾驶员进行制动时,汽车进入制动模式,电动机反转回收制动能量。为了消除制动踏板小开口的干扰,模型设置制动踏板信号β>0.05时,车辆才会进入制动模式。
3 混联式混合动力汽车的仿真与分析
FTP75和HWFET工况可以很好地模拟城市和市郊道路情况。FTP75城市循环工况适应城市道路,包括车辆的驻车、起动、加减速等常见工况,相比FTP72多包括了一个停车10 min后的发动机热启动阶段。模型的行驶里程为17.77 km,平均车速为34.1 km/h,持续时间为2 478 s。高速公路循环测试工况(HWFET工况)行驶里程为16.45 km,平均车速为77.7 km/h,持续时间为765 s。FTP75和HWFET工况仿真车速和需求车速对比图如图4、图5所示。


由图4、图5可知,两种工况下仿真车速和需求车速基本一致,仿真模型的车速跟随性较好,表明所建的整车模型是可行的。
3.1 发动机转矩输出
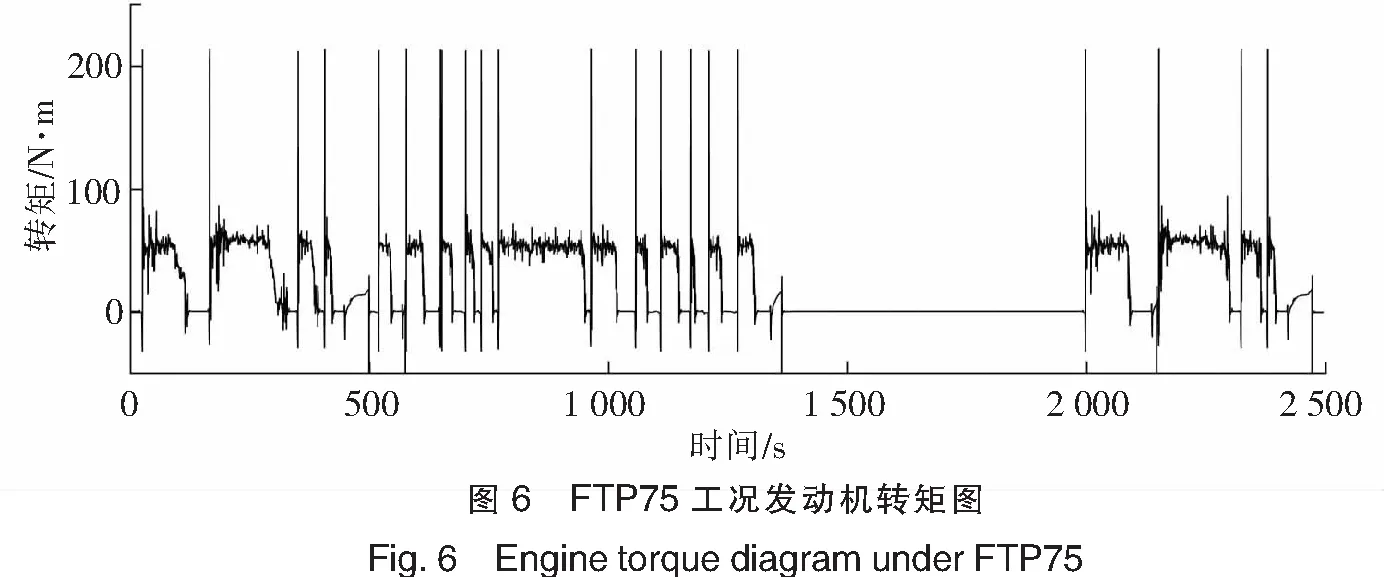
起步和小负荷工况下,PSHEV工作在纯电动模式。当车速达到30 km/h时,发电机可以起到燃油车起动机的作用,大转矩带动发动机启动。由图6和图7可知,行车过程中,发动机工作点多处在高效区域,油耗较低,使用率较高。在循环工况的驻车过程中,发动机处于关闭状态,避免怠速引起的高油耗。在减速或者制动工况下发动机出现了-27 N·m左右较小的负值转矩,进行了发动机制动。

3.2 电池SOC
SOC变化结果如图8、图9所示,电池SOC在循环阶段保持了平衡,始终工作在允许范围内。由图8可知:在城市道路行驶时,由于频繁的加减速,发动机多处在关闭或工作在大负荷状态下,SOC波动较大,变化频繁。由图9可知:在高速公路行驶起步时,电池有明显放电现象,为PSHEV提供足够的动力;进入巡航阶段后,发动机的一小部分功率用于给电池充电,SOC在小范围内跳动;在工况减速制动阶段时,进行了制动能量回收,电池SOC有明显上升。


3.3 油耗分析
PSHEV在城市道路和高速公路下进行燃油消耗计算,得出数据如表2所示。城市道路下PSHEV百公里燃油消耗为4.876 L,总耗油量为0.536 L,行驶里程17.77 km;高速公路下百公里燃油消耗为1.596 L,总耗油量为0.163 7 L,行驶里程16.45 km。PSHEV与动力性相近的燃油车的对比可知:在城市工况下,由于发动机的启停控制策略和大量的制动能量回收使得PSHEV的节油率达到了37.4%;在高速工况下,PSHEV的发动机多处在最优工作曲线模式下,节油率达到了70%。

表2 燃油消耗对比Table 2 Comparison of fuel consumption
4 结语
通过对多种混合动力系统的结构形式的比较,选择混联式进行研究分析。利用Matlab/Simulink的建模工具,建立了混合动力汽车的整车模型,子模块包括:循环工况模块、驾驶员模块、控制器模块、发动机模块、电动机模块、发电机模块、电池模块、行星齿轮模块和整车动力学模块。基于逻辑门限制的控制方法提出整车控制策略,依据设定规则和门限值选择整车运行模式并进行动力分配,把整车运行模式划分为纯电动模式、加速/爬坡模式、巡航模式和制动模式。在城市循环道路工况FTP75和高速公路工况HWFET下,分别对整车模型进行了整车经济性能仿真,结果显示,所建模型实现了整车需求转矩的有效分配,百公里燃油消耗在城市工况下比燃油车降低了37.4%,在高速工况下降低了71%,经济性能得到了很大的改善,验证了所建模型和控制策略的正确性和有效性。
[参考文献]
[1]陈伟.浅析新能源汽车的发展现状及发展趋势[J].现代职业教育,2017(27):183.
[2]孙贵斌,马腾腾,唐友名,等.基于Simulink的ISG型客车混合动力系统的仿真研究[J].机电工程,2016,33(11):1 415-1 420.
[3]连静,化玉伟,李琳辉,等.基于CRUISE的并联混合动力汽车建模与仿真[J].汽车电器,2014(5):56-59.
[4]杜玖玉,王贺武,黄海燕.基于规则的混联式混合动力系统控制策略[J].农业工程学报,2012,28(增刊1):152-157.
[5]LIN C C,PENG H,MIN J K,et al.Integrated dynamic simulation model with supervisory control strategy for a pem fuel cell hybrid vehicle[C]//ASME International Mechanical Engineering Congress & Exposition.Anaheim:[s.n.],2004:275-286.
[6]刘文杰.混联型混合动力汽车控制策略优化研究[D].重庆: 重庆大学,2007.
[7]张华.混联式混合动力轿车动力匹配及控制策略研究[D].武汉:武汉理工大学,2006.
[8]王素贞.基于CVT的混合动力轿车控制策略研究及整车性能仿真[D].长沙:湖南大学,2013.
[9]赵克刚,黄向东,罗玉涛.混联式混合动力电动汽车动力总成的优化匹配与监控[J].汽车工程,2005,27(2):146-150.
[10]陈汉玉.基于Matlab/Simulink的ISG混合动力车控制策略仿真与试验研究[D].镇江:江苏大学,2010.
[11]QI Y L,WANG W D,XIANG C L,et al.Economic MPC-based transient control for a dual-mode power-split HEV[J].Science China:Technological Science,2017,60(12):1 917-1 934.
[12]CHEN L,GENG C L,SONG J J.Modeling and simulation of a novel HEV automatic transmission system for heavy duty vehicles[C]//Control and Decision Conference IEEE.Chongqing:[s.n.],2017:1 368-1 372.
[13]LI Y,YI P,WANG M.Investigation to simulation of control strategy for series-parallel hybrid electric vehicle[C]// International Conference on Intelligent Human-Machine Systems and Cybernetics.Washington:[s.n.],2012:204-207.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
故事作文·高年级(2017年10期)2017-10-19
小学阅读指南·低年级版(2016年1期)2016-09-10
通信电源技术(2016年1期)2016-04-16
噪声与振动控制(2015年4期)2015-01-01
中国塑料(2014年12期)2014-10-17
客车技术与研究(2014年1期)2014-03-20
