
天狼星无人机大比例尺测图精度分析
2018-04-08 01:46孟庆鹏
测绘通报 2018年3期
孟庆鹏,孙 斌,凌 清
(中交第三航务工程勘察设计院有限公司,上海 200030)
摄影测量在摄影技术发展的历史中经历了3个阶段,分别为模拟摄影测量阶段、解析摄影测量阶段和数字摄影测量阶段[1],如今已经全面步入数字摄影测量时代。在国家开放低空空域、深化低空空域管理改革的背景下[2],小型化的无人机航空摄影测量开始逐步被测绘、林业、矿业、交通、水利、电力等行业所接纳,并应用于大比例尺测图、地籍测量、智慧城市建设、灾害监测、应急保障快速测绘、国家基础测绘等项目。然而,大比例尺数字测图要求点位精度高,野外数据采集的方法必须准确可靠[3]。拓普康天狼星无人机航测系统作为一种新型的航测技术,弥补了中低空普通航空大比例尺测图出现的不足,成为基础地理信息数据获取的一种新手段。因此,努力提高量测精度和作业水平,是保证航测大比例尺成图精度的重要措施[4]。本文通过天狼星无人机进行小范围实际测图,并以1∶500大比例尺测图标准为参考对其测图精度验证分析。
1 天狼星无人机航摄系统
天狼星(Sirius PRO)无人机测图系统是美国拓普康定位系统公司研制的高精度无人机测图系统,通过高精度的定位定向系统(position and orientation system,POS)记录高精度姿态参数[5],可大大节省整个航空摄影加密测图流畅的工作时间[6],能显著提高作业速度[7]。它配备有从飞行计划、影像获取、后处理到数据分析的全套软件,属于微型电动固定翼RTK航空测图系统。
1.1 无人机飞行平台
拓普康天狼星无人机采用了富士XM1相机、APS-C-X-Trans CMOS传感器,满足不同的高精度三维城市建模、高清影像航测应用需求;手抛式起飞,在执行航测飞行任务和返回着陆过程中始终保持自动驾驶的稳定飞行姿态,抵御不良天气,保证成像稳定并自动化操作。
拓普康天狼星将100 Hz RTK模块集成到无人机内,在无人机航测领域内实现了无地面像控的测量方式,利用实时差分数据固定解具有厘米级精度的RTK技术和无人机相结合,实时获取曝光点空间位置达到无像控,从而实现无地面控制的高精度、实时摄影测量与遥感[8],以更便利快捷的方式采集野外数据,降低了外业测量工作强度,改善了工作效率,节约了生产成本。在数字摄影测量时代,少用地面控制点或无地面像控不但可以减轻野外测量强度,缩短作业周期,而且可以提高航空摄影测量作业的自动化强度[9]。
1.2 数据通信
天狼星的通信模式与传统无人机不同,它的遥控器和连接器采用的是一种独立双通信的链路,若其中一条链路出现故障,另外一条链路也可以提供完整的控制,这种通信机制实现了双备份的功能,为安全飞行提供了最有力的保障。
1.3 配套软件
天狼星标准配套软件主要包括飞行计划软件MAVinci Desktop和影像后处理软件PhotoScan Pro。利用这两种主配套软件,用户通过一键式后处理接口,取得数字正射影像(DOM)、数字表面模型(DSM)和点云3种不同类型的生产结果。不仅如此,用户还可选择多种数据加工和编辑平台满足不同的需求,实现等高线生成、体积量计算、DLG编辑、虚拟测量等不同功能。
2 拓普康天狼星无人机1∶500地形图施测
2.1 项目测区概况
测区位于上海市崇明区某农田附近。测量面积为0.058 km2,测区大部分为水田,中间交叉乡村水泥小路,交通条件便捷,地势起伏平缓,植被主要为水稻、草地和芦苇,通视条件较好。
2.2 作业航飞
根据测区现状及天狼星无人机成图比例尺1∶500 测图精度验证分析需求,选择目标区域和期望的地面采样距离后,飞行计划软件Desktop自动创建独立的飞行计划,飞行相对航高127 m,地面分辨率3 cm,航向重叠率80%,旁向重叠度70%,设计航线手抛式起飞进行航测数据采集。
在航飞之前,为检验航测精度,在测区范围内喷绘摆设10处50 cm×50 cm的十字检测靶标,均匀分布在测区内,用每个检测靶标中心点作为检测点。使用测区附近D级GPS控制网的控制点作为控制基础,坐标系统为1954北京坐标系,3°带投影,中央经线121.466 667°E,利用RTK技术,在固定解状态下进行测量。为保证检测点自身精度,每个检测点在测量过程中进行3次采集,取其平均值作为最终成果[10]。
2.3 数据处理
摄影测量大数据的处理是现阶段摄影测量迫切需要解决的问题[11],天狼星无人机对此作了很大的改善。本次项目航飞完成后,通过MAVinci Desktop进行高精度POS数据下载和航飞影像的自动匹配;然后导入PhotoScan Pro数据处理软件,它是由俄罗斯Agisoft公司研发的一款基于影像自动生成高质量三维模型的软件,根据多视图三维重建技术,可以对任意照片进行处理[12],无需控制点,无需人工干预[13],实现航测成果中DOM和DEM产品的自动生成;生产结果叠加后导入清华三维EPS 3DSurvey中进行“裸眼画3D”的新型工作模式立体测图。本文项目测区航飞时间为9 min,航摄167张影像,软件处理匹配时间1 h 7 min,校准优化时间5 min 46 s,密集点数量16 012 906个,深度过滤处理时间12 min 45 s,重建测区DEM,如图1所示。
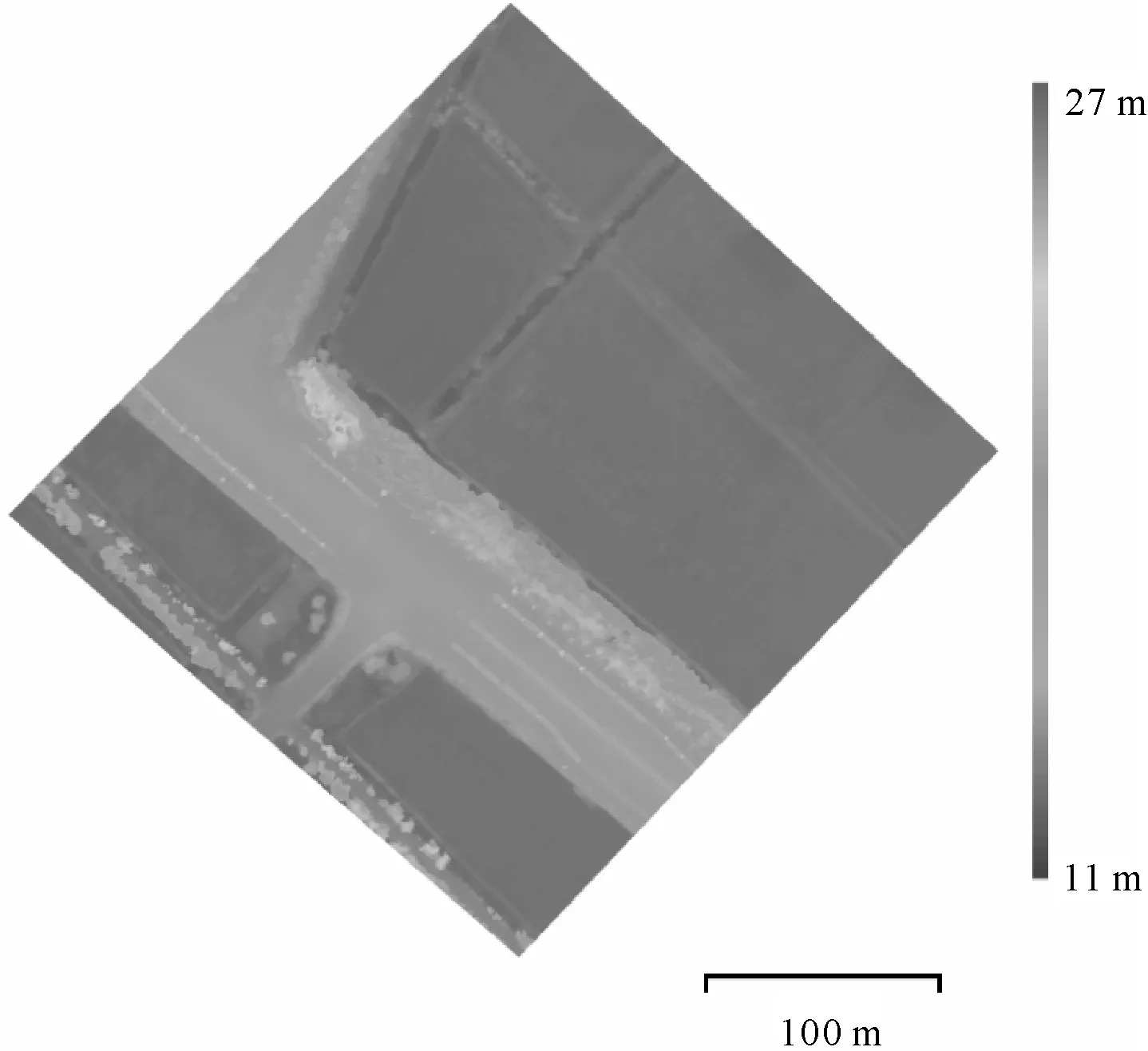
图1 重建DEM
3 精度检核分析
从本次项目Agisoft PhotoScan+MAVinci插件的处理报告中获悉航摄日志相关参数,可以反映相机位置精度。在后处理得到正射影像和DSM后,从正射影像上量测了均匀分布的10个标志检测点的平面坐标,并在DSM上量测了对应的高程,对天狼星无人机航测平面精度和高程精度进行了检验。
3.1 相机位置和误差估计分析
天狼星无人机的POS系统作为航空摄影测量系统的基准传感器,集惯性导航技术和卫星导航技术于一体,可实时获取载体位置姿态。POS系统辅助航空摄影测量,获得高精度定位定向信息[14],其优越性能获得了测绘领域高度认同。本文通过对相机位置的误差估计以反映其精度。如图2所示,可以直观形象地反映误差的大小及分布情况,Z误差由椭圆的颜色表示,X、Y的误差由椭圆的形状表示,估计的相机位置用一个黑点标记。
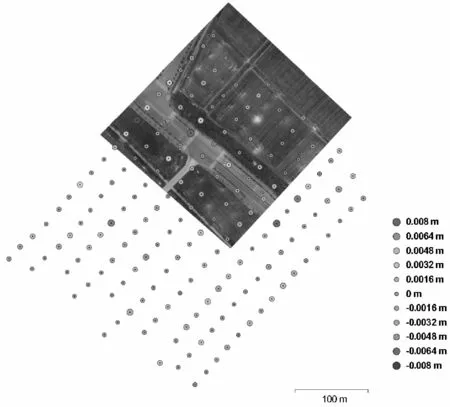
图2 相机位置和误差估计解析
表1反映的是图2整体的平均误差统计,线元素X、Y的平均位置误差在2 cm内,Z的平均位置误差小于3 mm,可以满足1∶500大比例尺测图的精度要求。

表1 相机位置平均误差 m
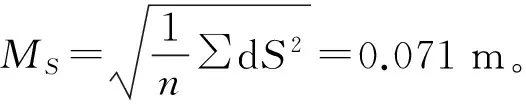
3.2 平面精度
3.2 高程精度
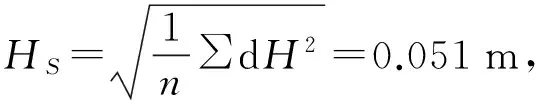
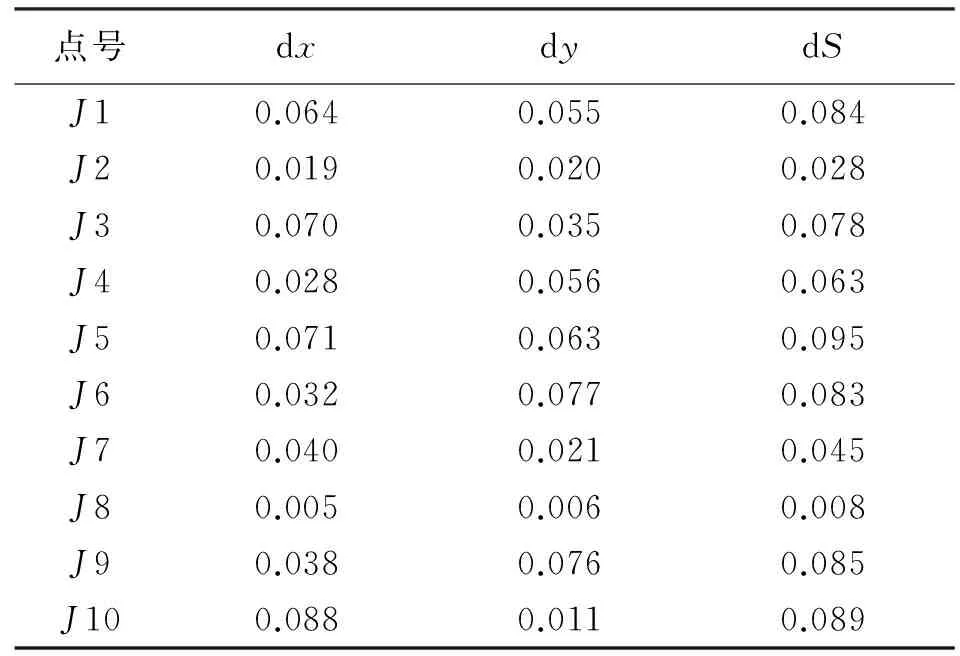
表2 平面数据差值统计结果 m
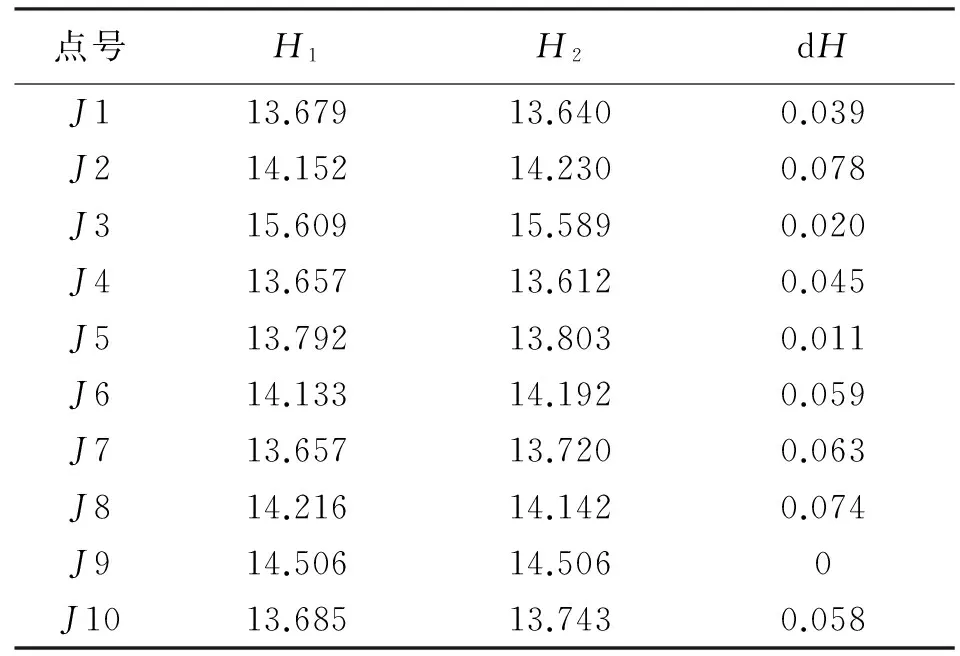
表3 高程数据差值统计结果 m
注:H1指靶标中心点RTK技术实测高程;H2指DEM检测点获取对应靶标中心点高程。
4 结 语
天狼星无人机作业成本低,自动化程度高,在采集像片的同时同步完成控制点的布设,取代了传统的地面控制点,一次飞行采集的控制点平面和高程精度都是RTK厘米级精度,借助RTK技术可以获取高精度航空制图成果,显著减轻了野外作业强度,为航测工作提供了更多便利。本文通过对天狼星无人机实际测图数据进行精度分析发现,其满足1∶500大比例尺测图要求,进一步证明了天狼星无人机的实用性和可靠性,值得推广和应用。
参考文献:
[1] 刘洋.无人机倾斜摄影测量影像处理与三维建模的研究[D].南昌:东华理工大学,2016:1.
[2] 张惠均.无人机航测带状地形图的试验及分析[J].测绘科学,2013,38(3):100-105.
[3] 杨晓明,段莉.数字地形图测绘中的几个问题探析[J].测绘通报,2004(10):42-45.
[4] 祝敬张,杨永安,高伟良,等.1∶2000比例尺航测成图试验报告[J].测绘学报,1982,11(3):61-71.
[5] 田金炎,段福洲,袁媛,等.基于图像匹配的无人机飞行质量评估方法[J].测绘科学,2013,38(5):175-176.
[6] 杨成,白石.POS系统及其在航空摄影中的应用 [J].长江科学院院报,2013,30(2):76-78.
[7] 杨晓明,袁天奇,王伟,等.山区快速高精度高程测量方法研究[J].华北水利水电大学学报(自然科学版),2014,35(2):65-68.
[8] 李德仁.摄影测量与遥感学的发展展望[J].武汉大学学报(信息科学版),2008,33(12):1212-1214.
[9] 袁修孝.当代航空摄影测量加密的几种方法[J].武汉大学学报(信息科学版),2007,32(11):1002-1006.
[10]李涛.天狼星无人机航摄系统在复杂地形测量中的应用与精度分析[J].测绘通报,2017(12):146-148.
[11]张祖勋,陶鹏杰.谈大数据时代的“云控制”摄影测量[J].测绘学报,2017,46(10):1239-1243.
[12]杨尧兰.天狼星无人机摄影测量系统在大比例尺成图中的应用研究[D].昆明:昆明理工大学,2016:18.
[13]姜丙波,查海林,苏军明,等.POS高精度POS在无人机航摄大比例尺测图中的应用 [J].测绘通报,2017(S1):30-32.
[14]万辉.航空摄影测量中机载POS系统的高精度定位定向技术研究[D].南京:南京航空航天大学,2011.
[15]国家质量技术监督局.数字地形图系列和基本要求:GB/T 18315—2001[S].北京:中国标准出版社,2001.
[16]孟现彪,史雅茹,王晓志,等.拓普康天狼星无人机在1∶500地形图测绘中的应用[J].内蒙古电力技术,2017(5):90-92.
猜你喜欢
现代苏州(2022年9期)2022-05-26
文萃报·周五版(2022年9期)2022-03-11
资源信息与工程(2021年5期)2022-01-15
小学科学(2021年7期)2021-08-18
小聪仔(科普版)(2020年12期)2021-01-18
航空知识(2019年1期)2019-01-11
环球飞行(2018年7期)2018-06-27
科技与创新(2016年22期)2017-03-30
中国非金属矿工业导刊(2015年5期)2015-12-22
中国交通信息化(2015年12期)2015-06-06
