
精密频率与相位调整方法
2018-04-04 09:10王超李世光夏振华于航党明朝毛新凯
现代电子技术 2018年7期
关键词:锁相环
王超 李世光 夏振华 于航 党明朝 毛新凯


摘 要: 精密频率与相位调整技术是守时系统的关键技术。利用直接数字频率合成(DDS)引入精密频率与相位调整量,通过锁相环将DDS输出锁定于本地恒温晶振OCXO,在锁相环中通过分频和两级频差倍增提升频率和相位调整分辨率,环路锁定后的OCXO输出即频率和相位精密微调后的信号。设计了基于相位比对的频率和相位调整分辨率测试系统,实验结果表明,精密频率与相位调整系统的频率调整分辨率达到了4×10-17,相位调整分辨率达到了6 fs。
关键词: 守时系统; 直接数字频率合成; 频差倍增; 频率与相位调整; 相位比对; 锁相环
中图分类号: TN98?34; P127.1+2 文献标识码: A 文章编号: 1004?373X(2018)07?0125?05
Precision frequency and phase adjustment method
WANG Chao, LI Shiguang, XIA Zhenhua, YU Hang, DANG Mingzhao, MAO Xinkai
(Beijing Institute of Radio Metrology and Measurement, Beijing 100039, China)
Abstract: The precision frequency and phase adjustment method is a key technology of time keeping system. The direct digital synthesizer (DDS) is used to introduce the precision frequency and phase adjustment amount. The output of DDS is locked at oven controlled crystal oscillator (OCXO) through phase locked loop (PLL). A frequency divider and a two?stage frequency difference multiplication are utilized in PLL to improve the frequency and phase adjustment resolution. The output of the OCXO after PLL locking acts as the signal after frequency and phase precise adjustment. The test system based on phase comparison was designed for frequency and phase adjustment resolution. The experimental results show that the frequency adjustment resolution of the system can reach up to 4×10-17, and the phase adjustment resolution can reach up to 6 fs.
Keywords: time keeping system; DDS; frequency difference multiplication; frequency and phase adjustment; phase comparison; phase locked loop
0 引 言
1955年英國国家物理实验室铯束原子钟的研制成功,正式标志着人类的时间标准进入原子时代。经过60年的发展,原子钟的准确度已由最初的1×10-9提高到目前的1×10-18,使原子钟成为保持时间最好的工具[1]。目前,全球70余个守时实验室的400多台原子钟保持着协调世界时(Universal Time Coordinated,UTC)[2],各实验室通过GPS共视或卫星双向时频传递(Two Way Satellite Time And Frequency Transfer,TWSTFT)的方法[3?6],将时间比对数据发送给国际计量局(Bureau International Des Poids Et Mesures,BIPM),从而得到本地守时钟组保持的时间UTC(k)与UTC的时间偏差。
守时钟组通常由多台氢钟和铯钟组成,由于存在环境变化、元件老化等原因,原子钟存在一个长期漂移率[7?8],从而引起守时误差逐渐变大。为了克服本地时间UTC(k)的时间偏差,需要对守时原子钟的频率和相位进行精密微调,以抵消钟漂和钟差[9?12]。守时原子钟工作在连续运行状态,准确度可达1×10-15量级,稳定度可达1×10-14量级,为了保证信号的连续和稳定,守时钟一旦运行起来就不再允许对其进行调整,而是对其输出的频率信号(5 MHz或10 MHz)和秒脉冲(One Pulse Per Second,1 PPS)信号进行频率与相位微调,从而在不影响守时钟连续稳定运行的前提下实现对UTC(k)时间偏差的修正。
这种对原子钟的频率和相位进行间接精密调整的技术即精密频率与相位微调技术,相应的设备即相位微跃计[13?15]其频率调整分辨率可达1×10-18量级,相位调整分辨率可达飞秒量级。一直以来,国际上都是通过精密频率与相位微调技术对本地UTC(k)进行调整[16],以保持与UTC的同步。
北京无线电计量测试研究所(Beijing Institute of Radio Metrology and Measurement,BIRM)是中国三家参与国际时间比对的单位之一,BIRM的实时主钟系统由一台氢原子频标(VCH1003)和相位微跃计(HROG?5)构成。图1是BIRM的主钟系统框图。以BIRM时间公报(Circular T)的UTC?UTC(BIRM)时间偏差值为参考,可以确定相位微跃计的频率与相位调整量,从而对UTC(BIRM)进行调整,保持其与UTC同步。由图1主钟系统的工作原理可知,相位微跃计是实现UTC(BIRM)调整的关键设备,而该设备目前严重依赖于进口。
本文将精密频率与相位调整量转换为直接数字频率合成(Direct Digital Synthesizer,DDS)的相关参数,利用分频器、频差倍增器和锁相环(Phase Locked Loop,PLL)实现频率与相位调整分辨率的提高。设计基于相位比对的频率和相位调整分辨率测试系统,实验结果表明,精密频率与相位调整系统有效可行。
1 DDS+PLL精密频率与相位调整
精密频率与相位调整系统通过DDS引入频率与相位调整量,利用PLL将本地(Oven Controlled Crystal Oscillator,OCXO)锁定于DDS,同时在环路中利用分频和频差倍增提升频率与相位调整分辨率,PLL锁定时即实现精密频率与相位调整。以OCXO信号作为基准时钟,UTC(k)信号作为同步信号,分频产生本地相参1 PPS信号,通过调整OCXO的频率和相位,即可实现对UTC(k)相位的精密调整。
精密频率与相位调整系统框图如图2所示。
圖2中,关键节点处的信号用[Si](i=1,2,…,6)表示,各信号的数学表达式如式(1)~式(6)所示,其中[f1]为外部参考5 MHz信号的标称频率,[Ai](i=1,2,…,6)为[Si]的幅值。为表达简洁起见,图2中略去了部分滤波器的表示。
图2中,[S1]为外部原子钟的5 MHz输入信号,其信号表达式为:
[S1]经过隔离放大器功分为4路:5 MHz?1,5 MHz?2,5 MHz?3和5 MHz?4。
本地OCXO的输出信号[S2]表达式为:
式中:[Δf]和[Δ?]分别为本地OCXO的频率和相位偏移量。
5 MHz?1经4倍频后作为DDS的系统时钟,系统根据外部输入的频率和相位控制信息计算DDS的频率控制字和相位控制字,对DDS输出的信号进行500分频后的信号[S3]为:
式中:[δf]和[δ?]分别为DDS的频率和相位调整量。
5 MHz?4与[S2]经过一级和两级频差倍增后输出的信号[S4]和[S5]分别为:
将5 MHz?2与500分频后的5 MHz?3进行混频,混频输出与[S5]进一步混频后产生的信号[S6]为:
[S3]和[S6]作为PLL鉴相器的输入,二者的混频滤波结果作为OCXO的压控电压控制量。由锁相环原理知,环路锁定的条件为[S3]与[S6]的相位正交,此时:
式(8)表明,经过图2中的PLL结构,OCXO的频率与相位调整分辨率相对于DDS提升了200 000倍。
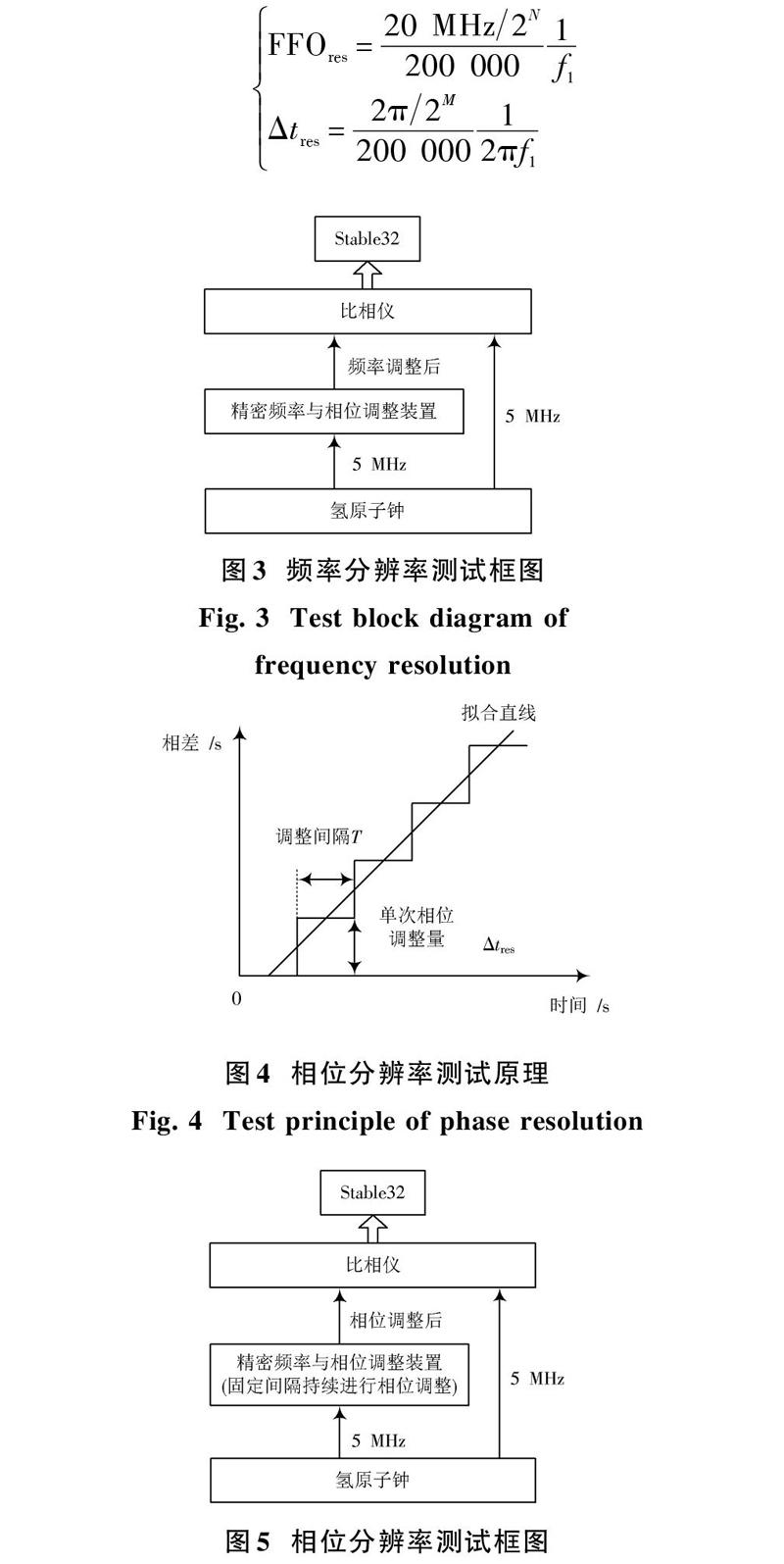
若DDS的相位累加器宽度为[N,]相位调整控制字宽度为[M,]则DDS的频率调整分辨率为[20 MHz2N,]相位调整分辨率为[2π2M,]此时,可计算精密频率与相位调整系统的频率调整分辨率FFOres及相位调整分辨率[Δtres:]
2 基于相位比对的分辨率测试
2.1 频率分辨率测试
精密频率与相位调整系统的频率调整分辨率可达1×10-18量级,若直接测量频率准确度,现有测试设备无法满足要求。
由于相位是频率的积分,因此,可以利用比相仪对频率调整后的信号相位进行测量,继而利用Stable32软件对相差数据进行分析,以验证精密频率调整效果。精密频率调整分辨率测试框图如图3所示。
图3中,氢原子钟的一路5 MHz信号经过频率调整后输入比相仪,另一路5 MHz信号直接输入比相仪,比相仪输出二者的相差数据给Stable32软件。Stable32软件对相差数据进行最小二乘线性拟合,拟合直线的斜率即频率调整量。
2.2 相位分辨率测试
精密频率与相位调整装置的相位调整分辨率为飞秒量级,无法直接对单次相位调整的结果进行测试。
若以一定调整间隔持续进行单次相位调整,并对调整后的信号进行相差测量,则理论上相差数据呈线性增长趋势,相差关于时间的变化情况如图4所示。
图4中,[Δtres]为单次相位调整量;[T]为相邻两次调整的时间间隔。长时间测试后,对相差关于时间的变化曲线进行线性拟合,则拟合直线的斜率[k]为:
即相位调整量为:
精密相位调整分辨率测试框图如图5所示。
图5中,氢原子钟的一路5 MHz信号经过固定间隔持续单次相位调整后输入比相仪,另一路5 MHz信号直接输入比相仪,比相仪输出二者的相差数据给Stable32软件。Stable32软件对相差数据进行最小二乘线性拟合,利用拟合得到的斜率和设定的相位调整间隔,根据式(11)即可求出单次的相位调整量。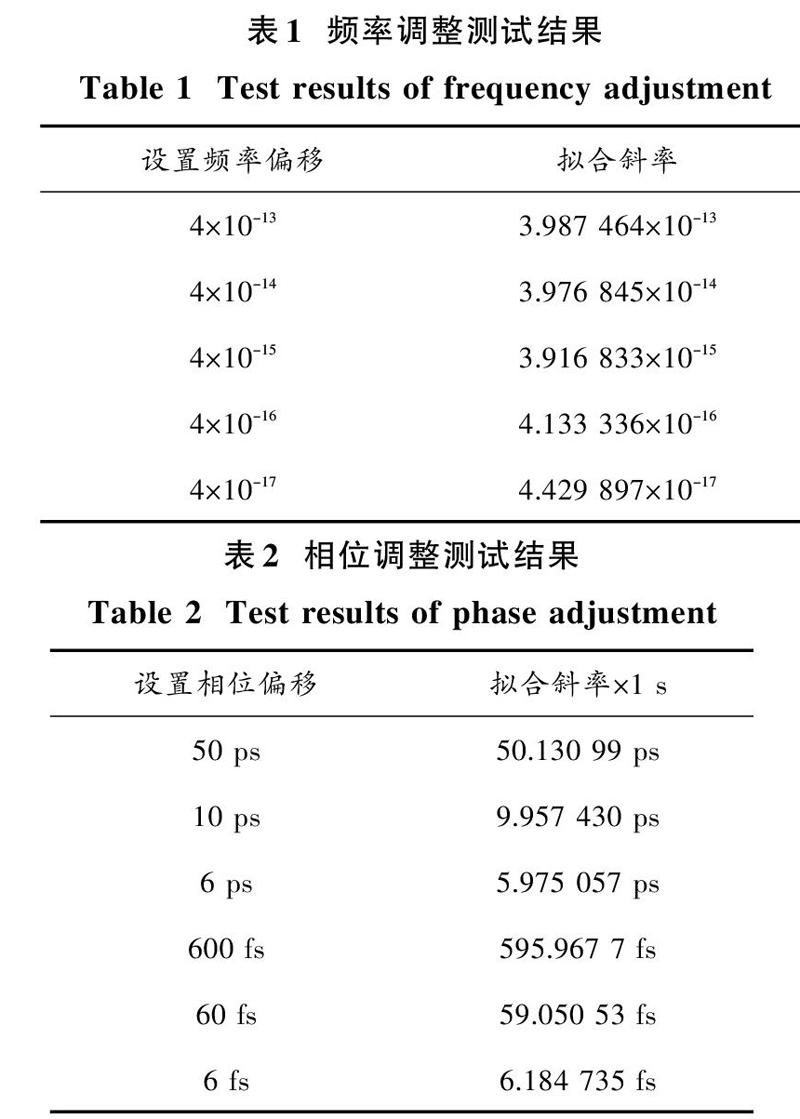
3 实验与分析
根据本文方法设计的精密频率与相位调整系统样机中选用的DDS相位累加器宽度为[N=48,]相位调整控制字宽度为[M=14,]输入待调整信号频率[f1=]5 MHz,则根据式(9)可求得系统的频率调整分辨率FFOres及相位调整分辨率[Δtres]的理论值为:
[FFOres≈7×10-20Δtres≈6×10-17 s] (12)
即此时系统的频率调整分辨率为7×10-20,相位调整分辨率为0.06 fs。上述频率与相位调整分辨率为理论计算结果,实际应用中还会受到器件特性、噪声和测试等因素的影响。
3.1 精密频率调整实验分析
实验中,设定频率调整量[Δf]从4×10-13开始,之后每次减小一个数量级,到4×10-17停止。不同[Δf]值下的相差曲线和拟合结果如图 6所示。
从图6可知,随着设置的频率偏移量变小,相差曲线的线性度变差,此时进行线性拟合需要的数据量变多,即测试时间增长。其中[Δf]=4×10-17时,测试时间为9×105 s,即10.42天。
对图 6中的[Δf]设置值和拟合结果进行整理,结果见表1。
从表1可知,[Δf]在4×10-13~4×10-16范围时,拟合斜率与设置频率偏移量基本吻合,误差在5%以内;[Δf]=4×10-17时,精密频率与相位调整系统的底噪和测量设备噪声对如此小的频率偏移影响较大,拟合斜率与设置频率偏移量的误差超过了10%。表 1表明,系统的频率调整分辨率达到了4×10-17。
在图6和表1中,[Δf]的最小值为4×10-17,若想对低于该值的频率偏移进行测量,则考虑到噪声的影响,需加长测试时间,由于时间因素,本文未对4×10-17以下的[Δf]进行测量。
3.2 精密相位调整实验分析
实验中,以1 s的间隔持续进行单次相位调整,设定的相位调整量[Δ?]分别为50 ps,10 ps,6 ps,600 fs,60 fs,6 fs。不同[Δ?]下的相差曲线和拟合结果如图7所示。
对图 7中的[Δ?]设置值和拟合结果进行整理,根据设置的1 s的调整间隔和式(11)可得到表2的测试结果。
从图7可知,相差随时间呈线性增长趋势,这与理论分析保持一致。从表2可见,根据式(11)计算的结果与设置的相位偏移基本吻合,误差在5%以内,该误差由精密频率与相位调整系统的底噪和测量设备的噪声综合造成。表2表明系统的相位调整分辨率达到了6 fs。
4 结 论
本文设计了基于DDS和PLL的精密频率与相位调整方法,并通过相位比对方法测试了调整分辨率,系统的频率调整分辨率达到4×10-17,相位调整分辨率达到6 fs,测试结果表明本文方法有效可行。
精密频率与相位调整技术可以补偿原子钟因漂移所引起的守时误差,提升原子钟的守时能力,具有良好的应用前景,对建设独立自主的守时系统具有重要意义。
参考文献
[1] 常宏,张首刚,王心亮,等.基准原子钟的发展及国家授时中心光学原子钟的研制进展[J].中国科学:物理学 力学 天文学,2010,40(5):616?622.
CHANG H, ZHANG S G, WANG X L, et al. The development of atomic clock for time keeping and the strontium optical clock in National Time Service Center [J]. Scientia sinica phys., mech. & astron, 2010, 40(5): 616?622.
[2] Bureau International Des Poids Et Mesures. Circular T 341 [EB/OL]. [2016?06?06]. ftp://ftp2.bipm.org/pub/tai//Circular?T/cirthtm/cirt.341.html.
[3] Bureau International Des Poids Et Mesures. BIPM annual report on time activities [EB/OL]. [2016?08?26]. http://www.bipm.org/utils/en/pdf/time_ann_rep/Time_annual_report_2015.pdf.
[4] ZHANG S K, WANG X Y, WANG H F, et al. A new modem for two way satellite time and frequency transfer [C]// 2015 Joint Conference of the IEEE International Frequency Control Symposium & the European Frequency and Time Forum. Denver: IEEE, 2015: 250?253.
[5] IMAE M, HOSOKAWA M, IMAMURA K, et al. Two?way satellite time and frequency transfer networks in Pacific Rim region [J]. IEEE transactions on instrumentation and measurement, 2001, 50(2): 559?562.
[6] ALLAN D W, WEISS M A. Accurate time and frequency transfer during common?view of a GPS satellite [C]// Proceedings of IEEE Frequency Control Symposium. Philadelphia: IEEE, 1980: 334?356.
[7] SU W, FILLER R L. Application of Kalman filtering techniques to the precision clock with non?constant aging [C]// Proceedings of IEEE Frequency Control Symposium. Hershey: IEEE, 1992: 231?237.
[8] PARKER T E. Environmental factors and hydrogen maser frequency stability [J]. IEEE transactions on ultrasonics ferroelectrics & frequency control, 1999, 46(3): 745?751.
[9] WEI Haibo. Frequency steering and the control of UTC(k) [C]// Proceedings of IEEE Frequency Control Symposium. [S.l.]: IEEE, 2012: 1?4.
[10] BAUCH A, WEYERS S, PIESTER D, et al. Generation of UTC (PTB) as a fountain?clock based time scale [J]. Metrologia, 2012, 49(3): 180?188.
[11] YUAN H, QU L. Timekeeping of NTSC in recent years [C]// Proceedings of the 42nd Annual Precise Time and Time Interval Systems and Applications Meeting. [S.l.]: IEEE, 2010: 51?58.
[12] ZHAO S, DONG S, QU L, et al. A new steering strategy for UTC (NTSC) based on hydrogen maser [C]// Proceedings of IEEE Frequency Control Symposium. [S.l.]: IEEE, 2016: 1?5.
[13] Microsemi Corporation. AOG?110 auxiliay output generator [EB/OL]. [2016?03?13]. http://www.microsemi.com/document?portal/doc_download/133317?aog?110.
[14] Spectra Dynamics, Inc. High resolution offset generator HROG?5 operating manual [EB/OL]. [2014?11?06]. http://www.spectradynamics.com/manuals/hrog?5_2016.pdf.
[15] ASCARRUNZ F G. A high resolution phase and frequency offset generator [C]// Proceedings of IEEE Frequency Control Symposium. [S.l.]: IEEE, 1998: 390?391.
[16] 董紹武.守时中的若干重要技术问题研究[D].西安:中国科学院研究生院(国家授时中心),2007.
DONG S W. Study on several important technical issues in time?keeping [D]. Xian: Graduate University of Chinese Academy of Sciences (National Time Service Center), 2007.
猜你喜欢
电子制作(2019年15期)2019-08-27
电子测试(2018年14期)2018-09-26
电测与仪表(2017年24期)2017-12-19
电测与仪表(2017年16期)2017-12-19
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年22期)2016-04-12
电源技术(2015年2期)2015-08-22
电测与仪表(2015年9期)2015-04-09
电测与仪表(2015年9期)2015-04-09
上海电机学院学报(2015年3期)2015-02-28
