隔离型电机驱动电路设计
2018-04-03 07:11三峡大学电气与新能源学院
电子世界 2018年5期
三峡大学电气与新能源学院 卢 云
1.引言
电机驱动是智能车重要组成部分,直接决定智能车的加速性能。电机驱动电路的一个重要指标就是电机驱动提供的电压和电流范围。比赛所使用的380马达额定工作电流3.5A,瞬态电流能达到6~7A,这种极端的剧烈变化容易引起地线点位的浮动,电池输出电压不稳定。优秀的电机驱动电路同时需要考虑,功率驱动电路与控制电路的信号隔离,确保电机工作在极端条件下,控制电路的不受影响。
本文详细研究电机驱动的电路原理,设计了一种隔离驱动电路,该电路在智能车电机驱动电路中,使用效果证明了改电路能消除因电机扰动引起的电机复位现象。
2.电路原理图
电路由三部分构成,分别是IR2104构成的mosfet驱动电路、光耦TLP521-1组成的隔离电路、WRA0505SDC/DC隔离电源模块电路,隔离电源模块单独为数字电路供电。
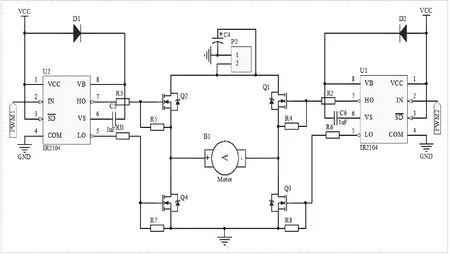
图1 电机驱动电路原理图
2.1 全桥驱动电路设计
IR2104是半桥mosfet驱动芯片,芯片内部自带死区电路,如图1所示,二极管D1、C5分别是自举二极管和自举电容,二极管选用1N5819,电容1uF。电阻R3阻值为30K,电阻R5阻值为10K。
2.2 光耦隔离电路设计
光耦采用TLP520-1,电阻R9阻值为470Ω,R10阻值为10Ω,R11阻值为10K。
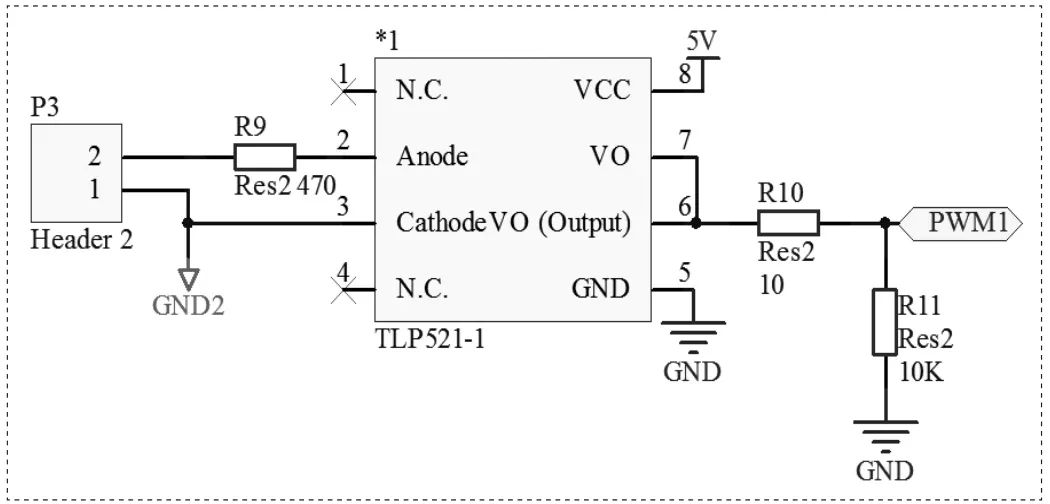
图2 光耦隔离电路原理图
3.总结
基于光耦隔离型的电机驱动电路具有很好的实用性,它既能为电机提供较大范围的电压和电流,具有很强的驱动能力和带负载能力,又能隔离功率信号与数字控制信号,使得单片机不受电机的干扰,保证了智能车能更加稳定运动。
[1]卓晴,黄开胜等.学做智能车[M].北京:北京航空航天大学出版社,2007.
[2]康光华.电子技术基础.模拟部分(第五版)[M].北京:高等教育出版社,2006.1.
猜你喜欢
山西电子技术(2022年2期)2022-04-22
科学咨询(2020年53期)2020-03-19
仪器仪表用户(2020年1期)2020-01-06
商品与质量(2019年22期)2019-11-29
电子制作(2019年16期)2019-09-27
科学导报·学术(2019年44期)2019-09-10
印制电路信息(2019年3期)2019-03-14
电子制作(2019年23期)2019-02-23
中学生数理化·教与学(2018年10期)2018-12-06
电源技术(2016年2期)2016-02-27