
家居3D打印机机械系统设计
2018-03-31 06:20肖弟向杨韵帆王岩松李延辉
时代农机 2018年1期
肖弟向,杨韵帆,郭 强,王岩松,李 明,李延辉,喻 鹏
(齐齐哈尔大学 机电工程学院,黑龙江 齐齐哈尔 161006)
1 概述
当前3D打印机的发展相当迅速,但是家用3D打印机应用还不是很广泛。针对这一现象,文章设计一套符合家居使用的3D打印机。其主要对丝杠和步进电机进行了计算和验算,在满足设计要求的前提下,设计出尺寸小巧,使用方便的桌面级3D打印机,使其能渐渐走进每个家庭。
2 机械系统总体设计
3D打印机的结构主要有:X、Y、Z轴步进电机,框架,直线运动导轨,进料头,打印托盘,挡块等。
总的设计流程如图1所示。
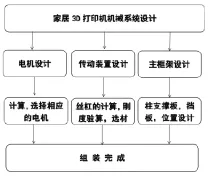
图1 设计流程图
(1)丝杠设计。滚珠丝杆螺旋副的负荷包括运动部件的重量和进给抗力。横向丝杆的最大轴向载荷为2000N,支撑件最大的距离高400mm,要求定位精度为0.001mm,按照式(1)进行计算,之后再进行验算。应按额定静载荷选用:

式中:fd为载荷性质系数,fH为动载荷硬度影响系数,pmax为最大轴向载荷;定载荷为C0≥2000N,查表的使用寿命时间为T=15000h,初选丝杆螺距t=5mm的丝杆转速:

由于丝杆螺距为5mm,可选W系列完循环丝副尺寸系列W2005-2.5全系列。
(2)刚度验算。滚珠丝杠收工作负载P引起的导程Lp的变化量,选择45号钢作为计算材料,由式(2)计算,再核对C级精度的允许误差:

式中,E为杨氏模量,S为丝杠截面面积;
Y轴轴向向所受牵引力大。故应该用Y向参数计算工作负载P=400N,导程Lp=0.5m,E=20.6×106N/m3

丝杆因受扭矩而引起的导程变化量ΔL2很小,可以忽略,所以导程误差:

查表C级精度的允许误差小于6μm,故刚度足够。
(3)稳定性验算。由部件自重产生使丝杆回转的扭矩Mf由式(3)计算,再核对电机的额定转矩,确定电机不会发生逆向转动。

式中,G为移动部件自重;S为导程;η为逆传动效率;移取G=200N,S=0.5m,查表 η=96%,由式(3)算得:

可知反应式步进的电动机带动丝杠螺母副时不会发生逆向转动。
(4)轴承的选择。初选6002,工作时为轻度冲击,正常工作温度,预期寿命为5000h。丝杠在工作的过程中受轴向载荷作用,且最大轴向载荷为Fa=200N,查手册可知道6002的基本额定负载C1=4.32kN,基本额定负载荷Cor=2050kN。选用轴承的型号为UCFU203轴承。
轴承的寿命为:

温度系数为f1=1,载荷系数fp=1,UCFU203轴承座,寿命指数 ε=3,得:

该轴承符合该结构的强度要求。
3 电机设计
假设喷头、支撑板、光杆和喷料的重量为30kg,由于步进电机的工作原理,所以没有额定的转速。负载速度V1为2mm/min左右,有速度可知道上升50mm/s,l=1.2m。(1)电机转速
(2)负载转矩:摩擦系数μ取0.3;负载重量Mg取300N;丝杠导程P取5mm;η为传动效率取90%;

(3)负载惯量。上下垂直运动转动惯量:

丝杠螺母转动惯量:

式中,丝杆密度ρ取铁的7.87kg·m3;丝杆长度L取0.5m;丝杆直径D取;J总=JB+JL=0.000144827kg/m2将惯量转换成转矩,所以电机转矩:
S为安全系数,这里取1.0,根据以上得出的数据,所以选择110ST-M02030步进电机。
4 结语
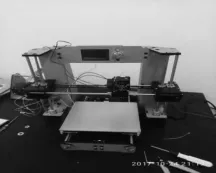
文章对家居3D打印机的机械系统结构进行了详细的分析和设计,同时对丝杠和步进电机进行了详细计算和校核。通过和支撑板的结合,完成了3D打印机的结构设计,并按照设计要求组装出如图2所示的打印机模型。该模型基本实现了最初的设计要求。
[1]杨伟群.3D设计与3D打印[M].北京:清华大学出版社,2015.
[2]王世刚,王树才.机械设计实践与创新[M].北京:国防工业出版社,2015.
[3]闻邦椿.机械设计手册[M].北京:机械工业出版社,2010.
[4]成大先.机械设计手册[M].北京:化学工业出版社,2002.
[5]王晓荣,余颖.电工电子技术基础[M].武汉:武汉理工大学出版社,2010.
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
有色金属材料与工程(2021年4期)2021-11-27
装备维修技术(2020年4期)2020-11-23
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年1期)2019-01-14
制造技术与机床(2017年8期)2017-11-27
发明与创新(2016年34期)2016-08-22
中国塑料(2016年7期)2016-04-16
通信电源技术(2016年1期)2016-04-16
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
