
海洋浮式风机耦合动力性能的研究技术与进展
2018-03-31 02:56胡志强
船舶与海洋工程 2018年1期
王 涵,胡志强
(上海交通大学 海洋工程国家重点实验室,上海 200240)
0 引 言
风能作为一种可再生能源,具有经济、清洁、环保和可再生的特点,已被各国重点关注。海洋风能持续稳定、空间限制少及传输能量损耗低等特点决定了海上风机是未来风电发展的主要方向。但是,随着水深的增加,为降低成本,海洋风机须采用浮式支撑平台,这会给其带来复杂的动力响应特点。自 1972年海上大型浮式风机的概念[1]被提出以来,世界各国的相关研究人员在浮式风机动力性能方面开展了丰富的研究,包括风机理论建模、数值计算、模型试验及海上实测等。由于海上风浪流载荷的复杂耦合作用显著及系泊系统、平台基础、塔架、机舱和叶片之间相互影响,使得其动力性能分析十分复杂。此外,所需的研究技术也比传统的固定式风机和海洋工程浮式结构物研究技术复杂得多。因此,对浮式风机的动力性能进行研究是一项具有挑战性的工作。
海洋浮式风机是强非线性系统,对其动力性能进行研究的最大挑战之一是必须同时考虑空气动力载荷和水动力载荷,在计算中需同时兼顾雷诺数和弗劳德数,从而对理论分析和试验研究均带来很大挑战。此外,海洋浮式风机是一个典型的多学科耦合系统,对其动力性能进行研究需考虑空气动力学、水动力学、结构动力学及自动控制等多个学科的知识,且在计算中必须采用时域分析技术。
本文从海洋浮式风机的理论模型发展、数值分析技术及模型试验研究技术等角度对浮式风机的耦合动力性能的研究现状和研究成果进行梳理与总结,为浮式风机的进一步研究提供借鉴和参考。
1 浮式风机模型的发展
浮式风机的概念自被提出以来,衍生出很多不同形式的平台基础概念。
2004年,WITHEE[2]提出TLP,spar和驳船平台组合基础,并采用spar平台的放射式系泊。2009年,Statoil公司[3]投资约4亿挪威克朗建成世界上第一座正式运行的海上浮式风机Hywind(见图1a)),其单机功率为2.3MW,以单柱式浮体平台为基础,作业水深为200m,并通过3根锚链系泊。2009年,Blue H公司[4]安装一台TLP式浮式风机(见图1b))。2009年,美国可再生能源实验室(National Renewable Energy Laboratory,NREL)[5]整合 WindPACT,RECOFF 和 DOWEC 项目,开发 5MW 基准风机。2010年,JONKMAN等[6-7]对 Hywind的参数进行修改,针对 5MW 基准风机设计单柱式基础,即继 5MW 单柱式浮式风机OC3-Hywind之后,在OC4项目中为该5MW风机设计半潜式平台基础。2011年,Principle Power公司[8]安装2MW三立柱半潜式浮式风机WindFloat,其作业水深为45m,采用4根悬链线进行系泊(见图1c))。2013年,日本安装2台浮式风机,分别为Fukushima半潜式浮式风机[9]和GOTO单柱式浮式风机[10](见图1d)和图1e))。

图1 浮式风机实型
除了上述典型基础的模型以外,丹麦 Sway公司还提出Spar/TLP混合结构模式[11](见图1f))挪威科技大学的MULIAWAN等[12]提出一种将Spar型浮式风机与圆盘形轴对称的双体波能转换器结合在一起的模型——STC(Spar-Torus Combination)系统(见图 2)。
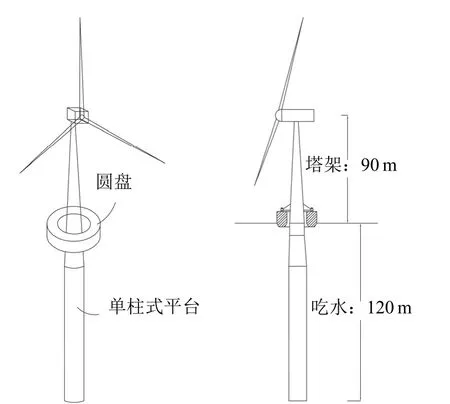
图2 STC系统
2 浮式风机数值计算程序的开发研究
为保证浮式风机的安全性和经济性,需在浮式风机的设计阶段对其耦合动力响应进行较为全面的分析和预报,确保使用者更为了解其动力性能。HALFPENNY[13]运用线性假设下的频域分析方法对浅海风机和浮式风机的水动力特性进行研究。但是,浮式风机不同于普通海洋浮式结构物,因风机叶片的旋转作用,前者属非线性系统,传统的线性频域算法并不适用。
随着研究的逐步深入,相关研究人员开始采用时域分析方法对浮式风机动力响应进行研究。但是,由于浮式风机是一个由叶片、机舱、塔架、平台及系泊系统组成的复杂多体系统,因此在对其风、浪、流等载荷作用下的动力响应进行分析时,必须考虑各部分的耦合作用,传统的固定式风机计算程序和平台水动力计算程序并不适用。基于此,相关研究人员开发不同的时域数值计算程序对其动力响应进行耦合分析。
2004年,WITHEE[2]将NREL开发的计算固定式风机的FAST与进行动力分析的ADAMS相整合,并对其提出的新基础形式浮式风机进行耦合动力分析。2006年,ZAMBRANO等[14]通过WAMIT对平台基础所受的波浪力进行模拟,并根据结构上的各种外力及系统的惯性,利用TIMEFLOAT程序计算风机系统的运动,对平台在风、浪、系泊力作用下的六自由度运动进行时域分析。
NREL也已在浮式风机研究及程序开发方面开展大量工作,其联合MIT开展了水深10~200m的海上风机研究项目。选择MIT/NREL的浅吃水驳船模型和TLP模型进行水动力性能及经济性的对比计算。利用NREL自行开发的结构动力-空气动力耦合的FAST软件和MIT开发的WAMIT软件,对风机系统进行结构动力-水动力-空气动力耦合的频域分析[15]。JONKMAN等[16]提出气弹-水动力全耦合仿真模型,并提出全耦合仿真工具必须基于时域分析,对FAST进行改进,增强 FAST.ADAMS 预处理器功能;同时,考虑平台基础的运动学和动力学、线性水动力载荷及锚链系统动力学,将MIT开发的SWIM-MOTION-LINES和WAMIT与FAST和ADAMS整合到一起。JONKMAN[17]将考虑线性静水回复力、非线性黏性拖曳力、线性波辐射产生的附加质量与阻尼、自由表面效应及线性绕射产生的波浪激励力的HydroDyn模块和准静态悬链线的系泊模块导入到FAST中来分析浮式风机的气动-水动-伺服-弹性的全耦合响应。JONKMAN等[18]采用全耦合的FAST程序对驳船平台基础的5MW浮式风机在不同载荷下的动力响应进行分析,通过将陆上风机系统与海上风机系统相对比,得出风机与浮式平台动态耦合对运动响应的影响。2009年,NREL联合斯图加特大学,采用全耦合的FAST程序对MIT/NREL TLP,OC3-Hywind Spar和驳船基础浮式风机的动力响应进行对比,研究发现,除Spar式风机在塔架处的受力较大之外,两者所受极限载荷及疲劳载荷相差不大[19]。2010年,NREL联合丹麦、挪威等国家,利用其开发的气动-水动-伺服-弹性全耦合仿真系统FAST及其他数值计算程序,分别对Spar的单柱式浮式风机模型在不同海况下的动力响应进行数值计算,比较不同数值计算程序的结果,分析不同建模方法、数值计算程序及其对动力响应的影响,并提出适于非线性浮式风机系统的“有效RAO”概念[20]。
此外,其他组织和个人也在开发不同的数值计算代码或数值程序来对浮式风机进行研究。KVITTEM等[21]将SIMO/RIFLEX与AeroDyn耦合,对WindFloat的半潜式平台的耦合动力性能进行分析。KOO等[22]开发一种MLTSIM-FAST代码,并选择DeepCwind项目中的TLP式浮式风机进行数值计算,将结果与模型试验相对比,验证其程序的合理性。KARIMIRAD等[23]使用HAWC2和DeepC对Spar式浮式风机在风浪作用下的动力响应进行分析。THOMAS[24]对HydroD,DeepC及TDHMILL3d进行整合,通过HydroD计算水动力系数,通过TDHMILL3d计算推力载荷,并通过动态链接库的形式将结果传递给DeepC,从而对TLP式、Spar式及半潜式5MW基准浮式风机进行全耦合数值计算。
2014年,国际能源署组织成立风能第30任务组[25],来自11个国家的22个组织采用24个数值计算程序对OC4的5MW半潜式浮式风机的动态响应进行分析,通过对比证明不同建模方法的准确性及其在对系泊系统进行动态分析时对系泊力的影响、非线性水动力项在计算平台运动漂移力时的贡献和进行整体建模与局部建模时黏性拖曳力的差别等。该项目的实施可对数值计算工具的开发和完善起到指导性作用。
在国内,有关浮式风机耦合动力性能的研究虽然起步相对较晚,但发展较为迅速。LIU等[26]提出一种空气动力学与水动力学耦合的计算方法,并开发时域数值模拟程序DARwind来对风机系统进行动态分析。通过将自由衰减、白噪声、单独风和风浪耦合工况下的风机系统响应与模型试验相对比,验证其时域模拟程序的正确性。唐友刚等[27]以5MW风机为模型,在概念上设计一种新型浮式风机平台,并编程计算频域范围内风机系统的运动响应。丁勤卫等[28]采用有限元方法建立5MW驳船式风力机模型,并结合AQWA软件对平台动态响应进行数值模拟分析。张亮等[29]采用修正Morison公式计算波浪载荷,验证算法的正确性,并建立浮式风机载荷模型,对5MW单柱式浮式风机的动力性能进行时域分析。
3 浮式风机数值计算理论建模研究
目前已开发的数值计算程序均由气动模块、水动模块、结构动力模块、系泊模块及控制模块等5大模块组成。通过对这些模块进行耦合,可实现对浮式风机的气动-水动-伺服-弹性全耦合分析。数值计算要以理论模型为依据,因此很多研究者致力于对浮式风机理论建模进行研究,对不同建模方法进行对比分析。
1) 在对浮式风机气动模块进行建模方面,MICALLEF等[30]基于NREL的5MW水平轴浮式风机,通过使用Navier-Stokes激励盘(Actuator Disc,AD)模型来研究其空气动力部分,并与叶素动量(Blade Element Momentum,BEM)模型和广义动态尾迹(Generalised Dynamic Wake,GDW)模型相对比,验证AD模型假设的正确性。研究发现:AD模型可获得BEM模型无法得到的复杂三维流动;而BEM模型仅适用于求解平均值或低叶尖速比和小波幅的准静态情况,不能模拟艉流的膨胀和收缩等不稳定效应,很难完成对疲劳等瞬变效应的分析。
2) 在对浮式风机水动模块进行建模方面,BAE等[31]针对5MW单柱TLP式浮式风机,对二阶和频波浪激励对耦合及非耦合动力响应的影响进行分析。分析发现:在非耦合状态下,二阶和频波浪载荷会在纵摇-横摇共振频率附近激起高频响应;而在耦合状态下,与频波浪载荷作用不会激起纵摇响应。KARIMIRAD[32]基于Morison公式、压力积分法和面元法建立不同的水动力模型,对平均漂移力和二阶水动力对浮式风机的影响进行分析,并通过Simo-Riflex-AeroDyn,HAWC2和FAST分别对Hywind的Spar式风机在风浪耦合作用下的动力响应进行数值分析。研究显示:平均漂移力对垂荡运动有较大影响,但对其他运动和拉力的影响不大;二阶水动力对响应的影响均不大,在对Spar式浮式风机进行分析时可忽略其作用。
3) 在对系泊模型的研究方面,XU等[33]采用FAST-OrcaFlex和FAST建立动态系泊模型及准静态系泊模型,对OC3-Hywind Spar式浮式风机在规则波和非规则波作用下的耦合动力响应进行分析。研究表明:在分析浮式风机运动响应时,采用动态系泊模型更为准确。
4) 在对浮式风机整机系统进行建模分析方面,WANG等[34]利用多体动力学理论对其进行分析,将系统看作塔架、机舱和叶片等3个刚体。
4 浮式风机模型试验研究
尽管相关研究人员已对浮式风机进行大量的理论分析和数值计算,但由于在对其进行建模和计算过程中会产生很多简化及近似问题,因此仍需通过模型试验来对其进行验证。由此,要使浮式风机的理论建模、数值计算及模型试验相互结合、互为补充、互为验证,以实现对浮式风机动力响应的准确分析。
Statoil公司在对Hywind进行预研时即对其进行模型试验,将试验结果与数值计算结果相对比,以保证研究的准确性。与之相似,对于所有即将投入建造或安装的浮式风机,相关研究机构会先通过模型试验进行验证。例如,Principle Power公司[35]在建造WindFloat之前就对其进行缩尺比为1:67的模型试验(见图3a));为进一步研究浮式风机的动力性能,Hydro Oil&Energy[35]对Hywind进行缩尺比为1:47的模型试验(见图3b));SETHURAMAN等[36]为验证新设计的有4根系泊缆的Spar式浮式风机在海况中具有较好的动力性能,进行缩尺比为1:100的模型试验。
荷兰MARIN水池也已进行大量模型试验研究,成果显著。缅因州大学[37]在MARIN水池进行一系列缩尺比为1:50的模型试验,分别对单柱式、半潜式和TLP式浮式风机模型(见图4)的动力响应进行研究,并证明不同风机型式的优缺点。MARIN水池在对GustoMSC的三浮体半潜式浮式风机进行1:50的模型试验时,采用一种推力相似的风机模型,解决几何相似带来的尺度效应问题[38]。此后,缅因州大学对[39]该推力相似的风机模型进行缩尺比为1:130的模型试验,并与MARIN的缩尺比为1:50的模型试验结果相对比,发现小尺度模型(即缩尺比为1:130的模型)试验更为准确有效。
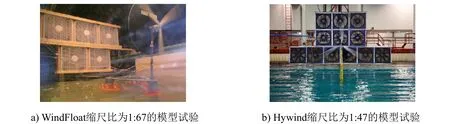
图3 模型试验
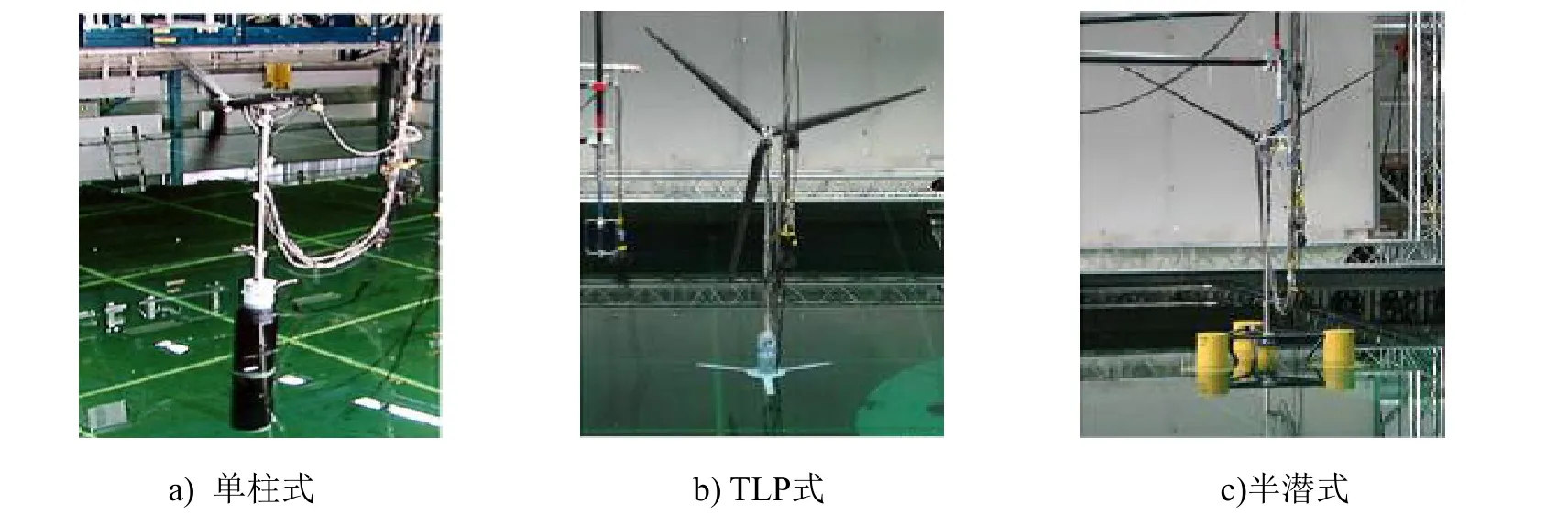
图4 荷兰MARIN水池缩尺比为1:50的模型试验
上海交通大学海洋工程国家重点实验室是国内较早系统地开展浮式风机模型试验研究的机构之一。DUAN等[40]针对单柱式浮式风机和半潜式浮式风机的耦合动力性能,在上海交通大学海洋工程国家重点实验室深水试验池对OC3的单柱式浮式风机进行1:50的模型试验(见图5),研究其在不同环境、不同载况下的动力响应特点。研究发现:平台纵荡与纵摇运动耦合程度很大;塔架顶部弯矩主要由一阶振荡分量决定,且受入射波的影响;在风浪激励下,风载荷对系泊张力的影响起主要作用。基于该模型试验,DUAN等[41]又对单柱式浮式风机的涡激运动进行分析。研究发现:风载荷对涡激运动有显著的抑制作用;横荡方向的锁定现象比纵荡方向的锁定现象出现早;在单独流的作用下,其他自由度和锚链拉力都会与横荡及纵荡涡激运动发生耦合。此外,DUAN等[42]基于OC3的单柱式浮式风机,重新设计推力匹配叶片系统(Thrust-Matched Blade System,TMBS),并通过模型试验与几何匹配叶片系统(Geometry-Matched Blade System,GMBS)相对比,研究其在一系列风和不规则波作用下的响应特点。研究发现:与GMBS不同的是,TMBS中的叶片旋转效应较弱,艏摇的振荡不仅会由叶片旋转效应激励,还会由入射波在波频处激励;此外,TMBS塔架顶部的弯矩、剪力及轴向推力都比GMBS大。

图5 OC3-Hywind缩尺比为1:50的模型试验
5 浮式风机动力性能分析
在研究浮式风机时,对其进行理论建模、数值计算及模型试验,以更好地研究其动力性能,验证风机形式的合理性、安全性、适用性及经济性等,使浮式风机设计最优化。
WAYMAN等[43]将驳船平台与TLP平台相对比,对两者在风浪作用下不同自由度的运动响应及两模型的经济性、可行性进行分析。研究发现:驳船平台系统六自由度固有频率不随风速变化,但会随水深的增加而稍有增大,其运动的标准差会随水深的增加而减小;TLP平台系统六自由度固有频率不随风速变化,但会随水深的增加而显著减小,其RAO和标准差也会随水深的增加而减小,这意味着TLP平台更适用于深水环境。此外,还发现TLP式浮式比驳船式浮式更经济。
BACHYNSKIE等[44]为对5MW TLP式浮式风机进行优化,通过耦合的非线性程序对不同参数的TLP式浮式风机在不同海况下的动力响应进行数值分析。结果说明:较大的排水量可减小平台的运动,增大的预张力可减小相对张力的变化;TLP式浮式风机响应受固有频率和刚度变化的影响比受直径、水深、压载及浮筒半径的影响大。
JEON等[45]对带有3个悬链线式系泊缆的中空圆柱形Spar式浮式风机在非规则波激励下的动态响应进行分析。研究发现:虽然平台纵荡和纵摇运动对波浪的激励不敏感,但受系泊缆的影响很大;纵荡响应峰值会随系泊缆总长的增加而减小,且会随系泊缆的连接位置接近浮心而逐渐减小,并在连接位置低于某一临界位置时反向增大;纵摇响应峰值会随连接位置的下降而增大。
马钰[35]首先通过FAST软件对OC3-Hywind Spar式浮式风机在风浪作用下的动态响应进行时域分析,随后通过傅里叶变换对其进行频域分析,研究各运动模态的耦合作用。此外,还进行“有效RAO”的计算,得到六自由度运动及锚链载荷对波浪载荷的响应频率曲线。研究发现:风载荷主要激励低频响应,如纵荡和纵摇固有频率的共振响应,但对波频响应的影响很小。
对于半潜式风机平台,相关研究人员也对其进行了一定的分析。LI等[46]通过FAST软件对OC4-DeepCWind的半潜式浮式风机在风浪耦合作用下的整体运动和系泊系统响应进行时域分析。研究发现:风载荷会加速平台的衰减运动,并会增加纵荡和纵摇的固有周期;高风速下的变桨距控制会给系统带来不稳定性,但这种不稳定性可通过改进桨距控制器得到改善,因此平台纵摇不会呈现出不稳定状态;但是,由于改进后的桨距控制器的频率仍比纵荡频率高,因此在共振频率范围内纵荡运动仍会表现出不稳定性。石陆丰等[47]设计一种半潜平台,并应用ADINA 软件,采用边界造波方法、ALE 动网格方法及网格变疏增大数值黏性的消波方法构建数值波浪水池,对该半潜式平台在规则波作用下的动力响应进行数值模拟。
除了以上传统形式的浮式风机,近年来有许多的研究者开始对新概念浮式风机的动力响应进行研究。KARIMIRAD等[48]基于TLP式模型和Spar式模型建立一个TLS混合式模型,并通过HAWC2和USFOS/vpOne对其运动及张力响应进行对比分析。研究发现:波浪诱导的平台运动会影响风机的功率性能;纵摇共振响应是浮式风机的主导运动,可通过张力腿来影响其他自由度的运动响应。HA等[49]对Spar式浮式风机进行改进,增加调谐液体阻尼器(Tuned Liquid Damper,TLD),并研究其对纵摇运动的影响。研究发现:TLD可减小纵摇运动,且多层TLD相比单层TLD可更有效地减小浮式平台在固定频率下的纵摇运动。此外,其提出一个可确定TLD最佳层数的理论模型。MULIAWAN等[50]对增加波能转换器的Spar式风机(STC系统)的动力响应进行分析。研究发现:在风浪联合作用下,波能转换器的增加不仅会使Spar平台运动的平均位移及系泊拉力均有微小增大,还会使纵荡和纵摇的标准偏差减小,即使纵摇更稳定、发电率更高。
6 结 语
本文对浮式风机的模型发展、理论建模、数值计算程序开发、模型试验及动力性能分析等方面进行较为全面的阐述。虽然当前已对浮式风机进行大量研究,但各研究方法均存在一定的简化和近似问题,如何更为准确、高效地进行研究仍需不断探究。
【 参 考 文 献 】
[1] 高伟,李春,叶舟. 深海漂浮式风力机研究及最新进展[J]. 中国工程科学,2013, 16 (2): 79-87.
[2] WITHEE J E. Fully coupled dynamic analysis of a floating wind turbine system[D]. Boston: Massachusetts Institute of Technology, 2004.
[3] Statoil. Website for statoil[EB/OL].[2017-01-15].https://www.statoil.com/content/statoil/en/news/archive/2009/09/08/InnovativePowerPlantOpened.html.
[4] BLUE H. Website for the blue-H floating wind turbine prototype in brindish harbor[EB/OL].[2017-01-15].http://www.bluehgroup.com.
[5] JONKMAN J, BUTTERFIELD S, MUSIAL W, et al. Definition of 5-MW Reference Wind Turbine for Offshore System Development[R]. Colorado: National Renewable Energy Laboratory, 2009.
[6] JONKMAN J. Definition of the floating system for phase Ⅳof OC3[R].Colorado: National Renewable Energy Laboratory,2010.
[7] ROBERTSON A, JONKMAN J, MASCIOLA M, et al. Definition of the Semi submersible Floating System for Phase Ⅱof OC4[R]. Colorado: National Renewable Energy Laboratory, 2014.
[8] Principle Power. Website for Principle Power[EB/OL].[2017-01-15]. http://www.principlepowerinc.com/en/windfloat.
[9] Fukushima Offshore Wind Consortium. Fukushima Floating Offshore Wind Farm Demonstration Project (Fukushima FORWARD)-Construction of PhaseⅠ[R/OL]. [2017-01-15]. http://www.fukushima-forward.jp/english/pdf/pamphlet4.pdf.
[10] GOTOFOWT. Website for GOTO FOWT[EB/OL]. [2017-01-15]. http://goto-fowt.go.jp/about/tech/.
[11] SWAY A/S. Website for SWAY[EB/OL]. [2017-01-15]. http://www.sway.no/?page=166.
[12] MULIAWANM J, KARIMIRADM, GAO Z, et al. Extreme responses of a combined Spar-type floating wind turbine and floating wave energy converter (STC) system with survival modes[J]. Ocean Engineering, 2013, 65 (2): 71-82.
[13] HALFPENNY A. Dynamic analysis of both on-and off-shore wind turbines in the frequency domain[D]. London: University College London, 1998.
[14] ZAMBRANO T, MACCREADY T, KICENIUK T, et al. Dynamic Modeling of Deepwater Offshore Wind Turbine Structures in Gulf of Mexico Storm Conditions[C]//The 25th International Conference on Offshore Mechanics and Arctic Engineering.Hamburg, Germany, 2006: 629-634.
[15] WAYMAN EN, SCLAVOUNOS PD, BUTTERFIELD S, et al. Coupled Dynamic Modeling of Floating Wind Turbine Systems[C]//Offshore Technology Conference. Houston, Texas, 2006: 1583-1591.
[16] JONKMAN J M, SCLAVOUNOS P D. Development of fully coupled aeroelastic and hydrodynamic models for offshore wind turbines[C]//The 2006 ASME Wind Energy Symposium. Reno, Nevada, 2006.
[17] JONKMANJM. Dynamics modeling and loads analysis of an offshore floating wind turbine[R]. Colorado: National Renewable Energy Laboratory, 2007.
[18] JONKMAN J M, BUHL M L. Loads analysis of a floating offshore wind turbine using fully coupled simulation[C]//Wind Power 2007 Conference & Exhibition. Los Angeles, California, 2007.
[19] JONKMAN J, MATHA D. A quantitative comparison of the responses of three floating platforms[C]//European Offshore Wind 2009 Conference and Exhibition. Stockholm, Sweden, 2009.
[20] JONKMAN J M, LARSEN T, HANSEN A, et al. Offshore code comparison collaboration within IEA Wind Task 23: Phase IV results regarding floating wind turbine modeling[C]//European Wind Energy Conference. Warsaw, Poland, 2010.
[21] KVITTEM M I, BACHYNSKI E E, MOAN T. Effects of hydrodynamic modelling in fully coupled simulations of a semi-submersible wind turbine[J]. Energy Procedia, 2012, 24: 351-362.
[22] KOO B, GOUPEE A J, LAMBRAKOS K, et al. Model test correlation study for a floating wind turbine on a tension leg platform[C]//The ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering. Nantes, France, 2013:1347-1356.
[23] KARIMIRAD M, MOAN T. Wave and wind-induced dynamic response of a spar-type offshore wind turbine[J]. Journal of Waterway Port Coastaland Ocean Engineering, 2012, 138 (1): 9-20.
[24] THOMAS S. Dynamic response analysis of a Spar-type floating wind turbines[D]. Trondheim: Norwegian University of Science and Technology, 2010.
[25] ROBERTSON A, JONKMAN J, VORPAHL F, et al. Offshore code comparison collaboration continuation within iea wind task 30: phase ii results regarding a floating semi submersible wind system[C]//The ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering. San Francisco, California, 2014.
[26] LIUG L, HUZ Q, DUANF. Preliminary analysis about coupled response of offshore floating wind turbine system in time domain[C]//The ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering. Newfoundland, Canda, 2015.
[27] 唐友刚,李嘉文,曹菡,等. 新型海上风机浮式平台运动的频域分析[J]. 天津大学学报,2013, 46 (10): 879-884.
[28] 丁勤卫,李春,周国龙,等. 基于AQWA的漂浮式风力机驳船式平台的动态响应[J]. 水资源与水工程学报,2015, 26 (2):150-160.
[29] 张亮,叶小嵘,吴海涛,等. 海上浮式风力机环境载荷及运动性能分析[J]. 太阳能学报,2013, 34 (5): 876-881.
[30] MICALLEF D, SANT T. Loading effects on floating offshore horizontal axis wind turbines in surge motion[J]. Renewable Energy, 2015, 83: 737-748.
[31] BAE YH, KIM MH. Rotor-floater-tether coupled dynamics including second-order sum-frequency wave loads for a mono-column-TLP-type FOWT (Floating Offshore Wind Turbine)[J]. Ocean Engineering, 2013, 61: 109-122.
[32] KARIMIRAD M. Modeling aspects of a floating wind turbine for coupled Wave-wind-induced dynamic analyses[J]. Renewable Energy, 2013, 53: 299-305.
[33] XU X, SRINIL N. Dynamic response analysis of spar-type floating wind turbines and mooring lines with uncoupled vs coupled models[C]//The ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering. Newfoundland,Canada, 2015.
[34] WANG L, SWEETMAN B. Multibody dynamics of floating wind turbines with large-amplitude motion[J]. Applied Ocean Research, 2013, 43: 1-10.
[35] 马钰. 单柱式浮式风机机理研究[D]. 上海:上海交通大学,2014.
[36] SETHURAMAN L, VENUGOPAL V. Hydrodynamic response of a stepped-spar floating wind turbine: Numerical modelling and tank testing[J]. Renewable Energy, 2013, 52: 160-174.
[37] GOUPEE AJ, KOO B, KIMBALL RW, et al. Experimental comparison of three floating wind turbine concepts[C]//The ASME 2012, 31st International Conference on Ocean, Offshore and Arctic Engineering. Rio de Janeiro, Brazil, 2012.
[38] HUIJS F, RIDDER EJ D, SAVENIJE F. Comparison of model tests and coupled simulations for a semi-submersible floating wind turbine[C]//The ASME 2014, 33rd International Conference on Ocean, Offshore and Arctic Engineering. San Francisco,USA, 2014.
[39] KIMBALL R, GOUPEE A J, FOWLER M J, et al. Wind/wave basin verification of a performance-matched scale-model wind turbine on a floating offshore wind turbine platform[C]//The ASME 2014, 33rd International Conference on Ocean, Offshore and Arctic Engineering. San Francisco, USA, 2014.
[40] DUAN F, HU Z Q, NIEDZWECKI JM. Model test investigation of a Spar floating wind turbine[J]. Marine Structures, 2016, 49:76-96.
[41] DUAN F, HU Z Q, WANG J. Investigation of the VIMs of a Spar-type FOWT using a model test method [J]. Journal of Renewable & Sustainable Energy, 2016, 8 (6): 063301.
[42] DUAN F, HU Z Q, LIU G L, et al. Experimental comparisons of dynamic properties of floating wind turbine systems based on two different rotor concepts[J]. Applied Ocean Research, 2016, 58: 266-280.
[43] WAYMAN E N, SCLAVOUNOS P D, BUTTERFIELD S. Coupled dynamic modeling of floating wind turbine systems[C]//Offshore Technology Conference. Houston, Texas,2006.
[44] BACHYNSKIE E, MOAN T. Design considerations for tension leg platform wind turbines[J]. Marine Structures, 2012, 29 (1):89-114.
[45] JEON S H, CHO Y U, SEO M W, et al. Dynamic response of floating substructure of Spar-type offshore wind turbine with catenary mooring cables[J]. Ocean Engineering, 2013, 72: 356-364.
[46] LI L, HU Z Q, WANG J, et al. Dynamic responses of a Semi-type offshore floating wind turbine[C]//The ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering. San Francisco, California, USA, 2014.
[47] 石陆丰,程建生,段金辉,等. 半潜式浮基风电平台设计及波浪动力响应分析[J]. 船舶与海洋工程,2015, 31 (1): 13-19.
[48] KARIMIRAD M, MEISSONNIER Q, GAOZ, et al. Hydroelastic code-to-code comparison for a tension leg Spar-type floating wind turbine[J]. Marine Structures, 2011, 24 (4): 412-435.
[49] HA M, CHEONG C. Pitch motion mitigation of Spar-type floating substructure for offshore wind turbine using multilayer tuned liquid damper[J]. Ocean Engineering, 2016, 116: 157-164.
[50] MULIAWAN M J, KARIMIRAD M, MOAN T. Dynamic response and power performance of a combined Spar-type floating wind turbine and coaxial floating wave energy converter[J]. Renewable Energy, 2013, 50: 47-57.
猜你喜欢
上海理工大学学报(2022年3期)2022-07-13
北京印刷学院学报(2021年9期)2021-10-22
船海工程(2020年3期)2020-07-31
航空发动机(2020年3期)2020-07-24
民用飞机设计与研究(2019年2期)2019-08-05
振动工程学报(2019年2期)2019-05-13
船舶与海洋工程(2018年4期)2018-09-10
科技经济市场(2017年2期)2017-05-22
筑路机械与施工机械化(2016年12期)2017-01-13
珠江水运(2015年12期)2015-07-25
