
SMA弹簧补偿的圆筒式MRF制动器工作原理及理论分析
2018-03-30 08:24:30马忠睿
现代制造技术与装备 2018年2期
马忠睿
1 磁流变液和形状记忆合金材料的特性
1.1 磁流变液材料的组成
经过大量研究,人们发现,磁流变液由三部分组成:可导磁的磁性颗粒、分散颗粒的基础液、提高性能的添加剂。
1.1.1 磁性颗粒
磁性颗粒的主要作用是在有外部场源激励的时候,能够导磁产生磁极化,其对磁流变液的流变效应和屈服特性来说是核心物质。因此,磁流变液的主要特性取决于磁性颗粒材料的化学和物理性质。一般来说,有着良好磁流变效应的磁流变液与优良磁性颗粒的关系密不可分。
1.1.2 基础液
磁流变液中有大量的磁性颗粒等介质,基础液的作用是将所有介质均匀地分散在磁流变液中,它是整个磁流变液的基础。介质分散的好坏对磁流变液的流变特性起着决定性的作用。现在市面上可以选用的基础液较多,如硅油、石蜡油等油类,此外,氟化烃、水和乙二醇等也可用作基础液。
1.1.3 添加剂
添加剂是磁流变液中第三种基础的组成部分,其作为调和基础液和磁性颗粒的中间物质,对提高磁流变液的特性也有举足轻重的地位。一般来说,添加剂可以稳定磁性颗粒在基础液中的活性和悬浮。
1.2 磁流变液的屈服特性
磁流变液的重要特性之一便是屈服特性,其表现为在外部磁源激励后,磁流变液由无磁源激励的牛顿流体特性,改变为塑形屈服特性。这种类似固体的塑性屈服特性与金属的屈服特性别无二致,都可以由屈服剪切应力来描述。因此,当施加外磁场后,磁流变液产生的屈服应力,可以作为变成“固体”的磁流变液的结构强度衡量标准。
无磁场作用时,磁流变液的剪切应力与剪切应变率之间的近似关系式由实验数据测出并归纳总结。磁流变液产生的屈服剪切应力可以通过对外部磁源大小的调整而进行无级调节。根据相关实验记载,磁场强度的增加可以使屈服剪切应力同时增加,一般用式(1)来表示这个关系。

式中:φ为磁性颗粒的体积百分数,H为磁场强度(kAmp/m),τy(H)为屈服应力,常数C与磁流变液的基础液有关,已知C=0.95(硅油);C=1(碳氢化合物);C=1.16(水)。
1.3 磁流变液的流变特性
可以用表示牛顿流体的方程,来表达磁流变液公式:

式中:η是零场时磁流变液的粘度,τ是磁流变液的剪切应力,γ是磁流变液的剪切应变率。
外加磁场时,磁流变液产生屈服应力,表现出类固体行为,其方程可用Bingham模型展示为:

式中:τy(H)是磁流变液的动态屈服应力,它随外加磁场强度H变化。
据磁流变液的Bingham模型,可以总结出流变特性:当磁流变液的τ<τy(H)时,磁流变液表现为Bingham流体(类固体);当磁流变液的τ>τy(H)时,磁流变液又表现为牛顿流体。
1.4 形状记忆合金效应
根据材料工作者长久以来的研究,形状记忆合金的形状记忆效应大致分为三类,但不管哪一种其机理都可以看成是某些分子结构特殊的合金在外界条件变化前后,合金组织结构相互转换的过程。下面分开说明这3种类型。
1.4.1 单程形状记忆效应
这种合金由于不能发生可逆的变形,只能应用在对形状要求不高的工程中,如一次性零件、垫圈或衔接处等。其原理是初始形状在某一温度内制成,而在另一温度内对其进行加工变形,当恢复为初始状态时,温度能恢复成初始状态,但此时合金不管温度再如何变化均不能发生形状改变。
1.4.2 双程形状记忆效应
这种合金在工程应用中适用范围较广,其可以发生可逆的形状变换,且前后形状相同,所以多用于相关记忆合金驱动器件的输出力部分。其原理与单程记忆效应相似,不同之处为合金最后可以反复变化两种温度时的状态,且形状相同、方向相同。
1.4.3 全程形状记忆效应
此类现象较为特殊,只能在某些成分特定的合金中出现,如富镍的Ti-Ni合金。其原理与双程记忆效应相似,不同之处为最后可以反复变化两种温度时的状态,形状相同但方向相反。
2 工作原理分析
2.1 装置工作原理分析
如图1所示,SMA弹簧补偿的圆筒式MRF制动器装置由两大部分组成,一部分是磁流变液制动部件,另一部分是形状记忆合金螺旋弹簧驱动的推杆摩擦块制动部件。在工作温度较低时,利用磁流变液的剪切应力传递转矩;在工作温度比较高时,由磁流变液和形状记忆合金控制的摩擦块共同传递转矩。当磁流变液由于外部因素或内部损耗后,其性能会逐渐下降,产生的屈服应力不能达到预期的效果,对于制动器来说会产生危险的后果。为解决这一情况,人们采用磁流变液和形状记忆合金双重制动的复合制动器。
该制动器的主要工作原理为:摩擦块14外侧的弧度与隔磁环10内侧的弧度一致;该摩擦块14的内侧与一推杆16相连,所述形状记忆合金弹簧15套设于该推杆16上;在该通孔13内设有一连接基座17,所述连接基座17套设在制动轴6上,并于制动轴6通过键配合一起;推杆16始终保持轴向移动,进一步提高制动效果。工作过程中,磁流变液制动效果随温度升高而下降,这时形状记忆合金弹簧15在感知温度的情况下轴向伸长推动摩擦块14,摩擦块14和隔磁环10内壁贴合产生摩擦力矩,补偿磁流变液因温度升高而损失的制动力矩,温度越高摩擦力矩越大。当制动器停止动作时,磁流变液温度下降,形状记忆合金弹簧15拉动摩擦块14回位。
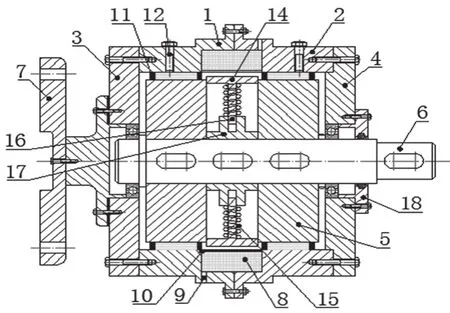
图1 SMA弹簧补偿的圆筒式MRF制动器工作原理
2.2 圆筒式磁流变液的制动原理
如图1所示,根据对磁流变液的流变特性与屈服特性分析,制动器未工作即未对励磁线圈通电时,制动轴正常转动,而在制动内圆筒与外壳内壁间的磁流变液由于未受到磁场的磁力限制,未发生屈服而处于流体状态。选择合适的磁流变液可以使此时内圆筒与内壁间的摩擦阻力很小。当制动器正常工作,即对励磁线圈通电后,磁流变液产生屈服特性,根据磁流变液的屈服特性分析,此时其由流体状态逐渐变为类似固体状态。在这期间产生的剪切应力成为制动力矩,阻止制动轴制动。
2.3 SMA弹簧驱动的摩擦块制动原理
由SMA螺旋弹簧驱动的推杆摩擦块部件的工作原理如图2所示。由于该制动器以磁流变液制动为主,摩擦制动为辅助。所以,当制动器中磁流变液工作温度不高时,制动器工作内腔室的环境温度也不会引起形状记忆合金发生热弹性马氏体相变。此时,弹簧与连接基座和推杆摩擦块相连,位于推杆顶部的摩擦块未与隔磁环相接处。制动器处于未工作状态或者是仅仅由磁流变液提供制动力矩的工作状态。当磁流变液由于长时间产生屈服应力后,摩擦损耗增加,热量逐渐上升。此时磁流变液工作性能下降,制动性能下降,辅助摩擦制动开始工作。温度上升,达到形状记忆合金弹簧奥氏体相变温度,弹簧开始伸长,推动推杆与滑块,弹簧另一端仍连接基座不动。
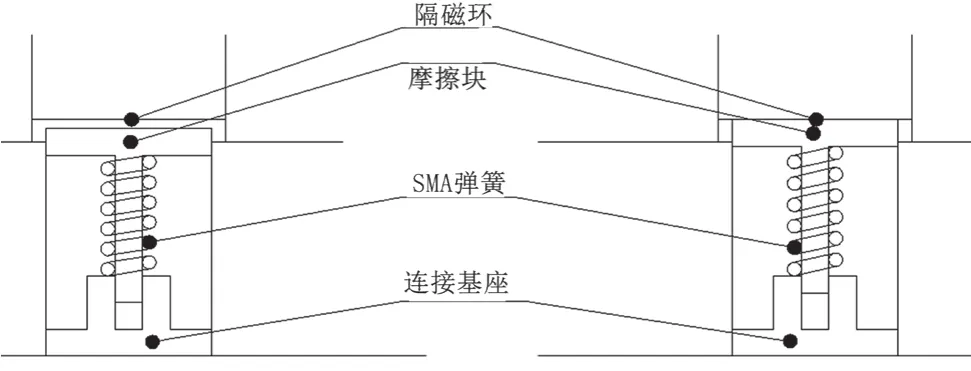
图2 SMA弹簧驱动摩擦块与隔磁环离合的工作原理
当弹簧足够长时,摩擦块与隔磁环接触,产生的摩擦力补偿因性能下降的磁流变液制动部分。制动器处于磁流变液和摩擦块共同提供制动力的状态。制动工作结束后,磁流变液工作温度下降,内腔室温度降低,形状记忆合金弹簧开始向低温相转变,形状恢复,弹簧收缩,摩擦块与隔磁环分离。制动器处于工作结束状态或仅由磁流变液提供制动力矩的工作状态。
3 结语
SMA弹簧补偿的圆筒式MRF制动器的设计十分独特,适用性较强,其通过形状记忆合金弹簧伸长提供的摩擦转矩,补偿因温度上升而工作效率下降的磁流变液制动转矩部分,使得制动器在高温时可以稳定安全地工作。
[1]黄金,廖林清,林昌华.圆筒式磁流变离合器的设计分析[J].功能材料,2006,5(37):760-764.
[2]刘成,贺建民,黄金.圆筒式磁流变液制动器分析[J].重庆工学院学报,2009,23(7):69-72.
猜你喜欢
科学技术创新(2020年21期)2020-01-06 20:58:51
中学生数理化·八年级物理人教版(2019年12期)2019-05-21 07:26:42
心肺血管病杂志(2019年1期)2019-04-22 01:12:04
设备管理与维修(2018年15期)2018-11-08 06:14:50
设备管理与维修(2018年8期)2018-08-13 12:09:14
中国核电(2017年1期)2017-05-17 06:10:00
中国塑料(2016年6期)2016-06-27 06:34:24
中国工程咨询(2015年8期)2015-02-16 06:38:52
中国病理生理杂志(2015年10期)2015-01-26 04:36:31
中国病理生理杂志(2015年10期)2015-01-26 04:36:31
