基于H.265的高清晰度无线图像传输系统设计
2018-03-29 03:36:40郑武略张富春王一鸣
电子设计工程 2018年2期
郑武略 ,尚 涛 ,张富春 ,金 钊 ,王一鸣 ,赵 敏 ,张 蔓
(1.广州市南方电网广东广州510000,2.电子科技大学四川成都611731)
输电线路在电力行业中有着举足轻重的地位,承担着电流传输的任务,输电线路可靠的运行,以及安全无危险的周围环境是我们必须要保证的。随着科学的快速发展和技术的革新,巡检输电线路的方式不再是单一的人工巡视,而是采用在线监测设备、无人机巡检设备等进行输电线路巡检,逐步变的多样化[1-2]。而在山区输电线路巡检中,特别是在高山、险山等人为不易操作的区域,采用无人机巡检的优势更为明显,采集到的图像使用无线图传进行传输。
与有线图像传输相对比,无线图传在可移动性和功耗方面均有较大的优势,但其实时性和图像的传输速度以及质量远不及有线图像传输:1)图传清晰度不够,传输距离近,不能满足应用要求;2)输电走廊无通信链路,输电线路巡视视频无法实时回传监控中心;3)巡视数据处理智能化程度低巡视图片、视频的分析、命名、存档、查询均为人工操作,智能化程度低,效率不高,特别是巡视视频和现场铁塔号无法自动对应,仍然主要依赖于人工操作。所以,针对无人机巡检技术发展,高清远距离无线数字图像传输系统对其具有深远的影响意义
1 系统方案
设计的机载模块,通过将相机和无线发射模块整合在一起来构成具有无线传输功能的相机,其中相机分为高清视频采集和压缩两部分,而视频采集模块则采用支持自动强光抑制、高速自动聚焦等功能的高端机芯。通过采用自动强光抑制及自动聚焦机芯,机载模块能够高效的进行视频采集,并且能实时得到相机焦距信息;视频压缩模块采用H.265硬压缩方式[3],与其他方式相比,所需时间较少,并且效果更好。无线发射模块由信息调制和功率放大器两部分组成。无线接收部分由缓冲区和解调、解码、显示3个模块组成。能够完成高质量视频以及焦距信息传递输送,距离长达5 km[4]。
射端中采用H.265压缩格式压缩视频,可以减少70~80%的带宽消耗。H.265视频压缩模块采用高效的硬压缩方式,采用相应的芯片提供高速高可靠性的视频压缩。无线传输模块采用放大器将无线信号放大后利用554 MHz频率的无线信号传输,能够有效的绕过障碍物的遮挡,提高传输的可靠性。电源备份采用高效锂电池,为高质量清晰度摄像机机芯、视频压缩和无线传输3个部分供电。MCU控制器主要用来管理系统中的各个外围接口,并协调其工作。发射端系统框图如图1所示。

图1 发射端系统框图
线图传的接收端由信号接收和视频解码、输出接口以及电源4个不同的模块共同构成[5]。信号接收模块由高灵敏度天线和功率放大器两部分组成,高灵敏度天线快速高效的接收发射端发出的信号,并通过功率放大器进行放大,使其更加明显。视频解码模块主要器件为H.265芯片,对已拍摄完成的数字视频解压缩。在输出模块中,选择HDMI接口负责将信号接收端与显示器之间的链接。接收、解码、视频输出接口3个不同的模块所需要的一切电量均使用电源部分中的高效锂电池提供。接收端系统框图如图2所示。

图2 接收端系统框图
2 技术方案
此次基于554 MHz视频传输设计的无线图传整体方案大致分为以下5大块:1)视频采集;2)视频编解码;3)系统核心控制;4)系统供电;5)射频通信[6]。视频采集部分功能为完成视频信息的采集,通过CMOS图像传感器芯片采集外界的视频信息并将其转化为电信号以供视频编码处理;编解码部分主要用于高清视频的信号编码以及接收端解码[7];系统核心控制部分功能是控制视频信号的采集、发送和接收[8];系统供电部分是为系统提供需要的工作电压;射频通信部分通过直接发送和接收电磁波信号进行高清视频的发射以及接收以达到通信的目的。
2.1 视频采集部分
视频采集部分采用GoPro HERO4户外运动卫星高清摄像机,GoPro相机是一款小型可携带固定式防水防震相机。
GoPro摄像机能够拍摄1 440 p、1 080 p、720 p的视频,HERO4 Black是首款能够拍摄超高分辨率、高帧速率视频的小型摄像机。使用HERO4 Black,能够以每秒高达30帧的速率连拍12 MP照片。非常适合将摄像机固定到其他设备上进行拍摄而无法安东快门按钮时的场景。GoPro充电采用微型USB接口,可采用Micro HDMI传输高达1 080 p的视频流,并且可以将所拍摄视频存入microSD内存卡中。
2.2 视频编码部分
本系统视频编解码部分采用海思Hi3516A视频编解码芯片,采用业界最新的H.265视频压缩编码器(Hi3517A不支持),同时采用先进低功耗工艺和低功耗架构设计,这一切将使得Hi3516A在同类产品中占有巨大优势,不但拥有低码率,而且在图像清晰度上也极其优秀,同时,低功耗也是选择它的一个重要理由。其系统框图设计如图3所示。
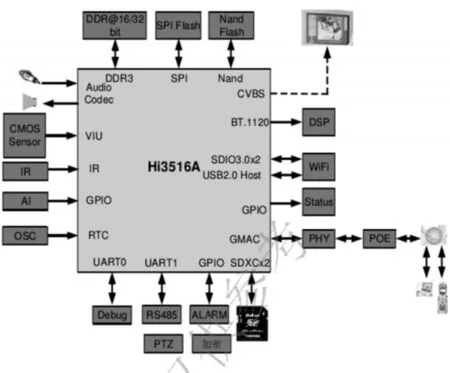
图3 H.265系统框图
其在视频编解码方面具有优越的性能:
1)处理器内核:A7@600MHz,32KB I-Cache,32KB D-Cache/128KB L2 cache,支持 Neon加速,集成FPU处理单元;
2)视频编码:H.265 Main Profile,H.264 BP/MP/HP,MJPEG/JPEG Baseline编码;
3)视频编码处理性能:H.265/H.264编码可支持最大分辨率为5M Pixel且具有多码流实时编码能力,支持JPEG抓拍5M@8fps,编码帧率支持为1/16~60fps,CBR/VBR 码率控制 16 kbit/s~40 Mbit/s,且支持8个感兴趣区域(ROI)编码;
4)智能视频分析:集成智能分析加速引擎,支持智能运动侦测、周界防范、车牌识别、视频诊断等多种智能分析应用[9];
5)视频与图形处理:支持3D去噪、图像增强、动态对比度增强处理功能,8个区域的编码前处理OSD叠加,视频图形,即视频+图形两层进行叠加[10];
6)音频编解码:通过软件实现多协议语音编解码,协议支持G711、ADPCM、G726,支持回声抵消功能,支持ANR,ALC功能;
7)视频接口
输入:
-支持8/10/12/14 bit RGB Bayer DC时序视频输入,时钟频率最高150 MHz;
-支持BT.601、BT.656、BT.1120输入接口;
-支持MIPI、LVDS/Sub-LVDS、HiSPi接口;
-支持与 SONY、Aptina、OmniVision、Panasonic等主流高清CMOS sensor对接;
输出:
-支持1路PAL/NTSC输出,支持负载自动检测;
8)音频接口:集成 Audio codec,支持 16 bit语音输入和输出,支持I2S接口,支持对接外部Audio codec;
支持I2S接口,支持对接外部Audio codec。
2.3 系统核心控制部分
本系统使用OMAP5910作为系统的主控制芯片,接收其他模块信息,并对其他模块功能发送命令控制。双核应用处理器OMAP5910可以实现互连、嵌入式、远程等多种计算,其中,TI应用最为广泛的TMS320C55XDSP可以用于实时多媒体,而在功能上有所改善的ARM925则可满足控制和接口等方面的需要[11]。
基于双核结构,OMAP5910具有极强的运算能力和极低的功耗,一方面产品性能高、省电,另一方面同其他OMAP处理器一样,采用开放式、易于开发的软件设施,支持广泛的操作系统,如Linux、Windows、WincE、Nucleus、PalmOS、VxWorks、Java等[12-13]。OMAP5910系统工作流程如图4所示。

图4 系统工作流程
2.4 系统供电部分
因为本次设计的方案中存在各类功能和和性质均不相同的电路,因此,整个系统的供电部分与其他同类方案相比,要复杂许多。只有足够可靠的电源,才能完全保证整个电路的正常工作。在本次设计方案中,为了满足携带移动方便的要求,采用电池提供所需电能,同时,在实际应用中,对工作时长以及安全性能方面有着较高标准,这就导致在此次方案中需要较多的工作专注于电池的选取。
此次,选取3块3.7 V锂电池,经依次串联组成的3S锂电池提供系统所需电能。系统输出电压为11.1 V。众所周知,因为方案选取电池充当电源,所以伴着时间逐步推移,器件的持续工作对电池的容量会有一定程度的使用,导致电压强度慢慢变低。为了解决系统方案的不足,由于最大输出电路电流均为800 Ma,拥有较强大的负载能力,因此选取输出电压强度分别为5 V和3.3 V的TPS62050与TPS62056[5]。
TPS62050电路图如图5所示。
TPS62056电路图如图6所示。
2.5 射频通信部分
通过对市场上较为流行的几种收发芯片进行比较,最终,采用nRF905,整个芯片采用QFN封装,大小仅为5×5 mm。
单片射频收发器nRF905相较于同类产品来说,更为稳定可靠,生产于挪威Nordic VLSI公司。芯片内置频率合成器、功率放大器、晶体振荡器和调制器等功能模块,主要工作于433 MHz、868 MHz和915 MHz等ISM频段,在频率合成方面,选取灵敏度更高的DDS+PLL,达到-100 dBm,最大发射功率达+10 dBm,数据速率可达100 kbit/s。[14]其显著特点是外围元件极少(约10个),低工作电压(1.9V),功耗小,接收待机状态仅为2.5 μA,可满足低功耗设备的要求。由于器件正常工作时,处于ShockBurst模式,并且曼彻斯特编/解码直接由芯片内置硬件直接完成,同时内置空闲与关机模式,因此整个器件在使用过程中简单方便,并比同类芯片更为节能[15]。
射频通信模块PCB板如图7所示。

图5 TPS62050电路图
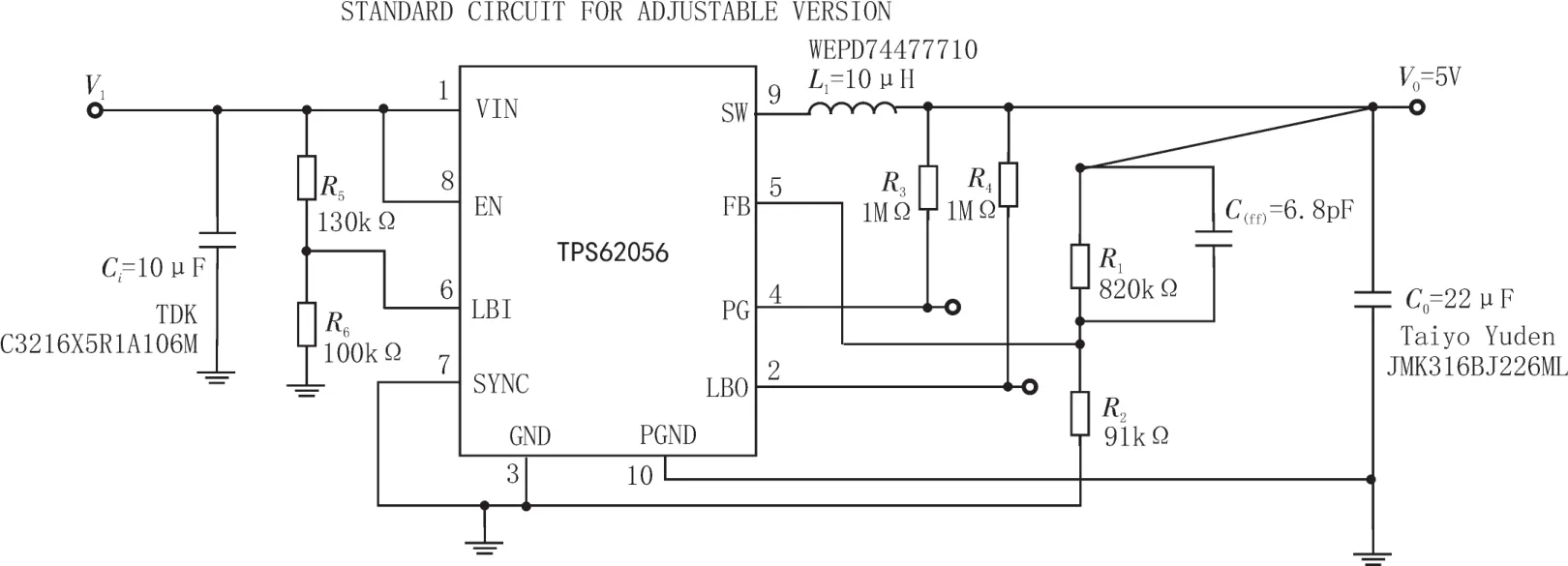
图6 TPS62056电路图

图7 射频通信模块PCB板
3 实验验证
3.1 室内环境测试
为测试图传设备工作是否正常、画面是否清晰,实验设计采用GoPro摄像机、图传设备、电视显示设备在室内环境进行测试。
测试步骤:图像发射端与图像接收端天线距离1 m左右,GoPro摄像机通过Micro HDMI线与图像发射端通信;图像接收端与电视显示器通过HDMI相连接。先后打开发射端与接收端,检查显示器是否有清晰画面。其测试场景如图8所示。

图8 室内测试场景
从实验结果可以看出,图像发射端与图像接收端形成了有效的信息交互通信连接,并且通过搭载GoPro相机,可以形成实时高清图像传输反馈,且显示器画面清晰、稳定,图像传输设备能够稳定通信。
3.2 室外环境测试
为测试及验证图像传输有限距离,实验通过采用摄像机、图传设备、显示器、八旋翼无人机在室外环境进行测试。首先,对建立高清图传地面接收端,将图传接收平台装在汽车上,构成一个移动的接收平台,如图9所示。

图9 室外车载接收端测试场景
在实验测试前对飞机所在位置的GPS进行标定,本次实验无人机GPS坐标为(103.916 115,30.755 365)。然后将测试选择在宽阔的马路上,并起飞前,请确定当前接收卫星书数量,后控制搭载高清图传发射端的无人机上升至50多米处开始悬停,并启动汽车远离无人机的方向行驶,直至显示器无图像为止,记录此时GPS坐标。其实验场景如图10所示。

图10 机载高清图传传输测距
从实验结果可以看出,当汽车GPS坐标到达(103.825 818,30.807 643)时高清图像传输到达临界距离,并通过计算可以得出本次实验高清图传最大传输临界距离为10.4 km有效验证了图传设备预估10 km传输距离的要求。
4 结束语
文中主要针对无线图像传输系统的传输最大距离及传输视频清晰度进行研究。由于从传统高清图传普遍成本高昂且操作复杂,因此本文在高清远距离图传设计选材方面采用大众通用相机作为基础,并对视频编码、、控制及射频通信模块进行设计,并从实验结果可以看出本文设计的高清图传可以很好的完成图像传输任务、携带方便,并具有超视距图像传输能力,可以有效应用在远距离无人机输电线巡检任务中。
[1]张增.基于Spice协议流媒体关键技术研究[D].南京:南京邮电大学,2013.
[2]苏守财.PDA电力巡检GIS系统的研究与开发[D].杭州:浙江工业大学,2013.
[3]陈海波.基于SEP6200微处理器平台的多路视频解码系统的设计与实现[D].南京:东南大学,2014.
[4]余斌,王文浩,韩文.视频监控系统的H.264算法优化设计[J].华人时刊旬刊,2013(4):176.
[5]张秋林,夏靖波,邱婧,等.基于ARM和FPGA的双路远程视频监控系统设计[J].液晶与显示,2011,26(6):780-784.
[6]吉爱亲.基于OpenCV的视频监控系统设计与实现[D].西安:西安理工大学,2014.
[7]闫霄颖.H.264解码器在ARM平台的移植及关键算法优化[D].青岛:山东科技大学,2013.
[8]顾蔚如.无线视频传输系统设计与测试[D].西安:西安电子科技大学,2009.
[9]万民永.智能视频监控算法及硬件实现研究[D].杭州:浙江大学,2012.
[10]顾亮郑世宝朱建清,HDTV SoC的图形引擎设计与实现[J].电视技术,2005(11):54-56.
[11]潘涛涛,张正炳,夏振华,OMAP5912双核通信及其数字音频系统实现[J].电声技术,2008,32(1):67-69.
[12]陈永真.基于蓝牙的嵌入式无线视频采集系统硬件设计与改进[D].西安:西安电子科技大学,2008.
[13]李鹏.基于OMAP5910的DSP核实现MPEG-4编码器及JPEG编码器[D].天津:天津大学,2006.
[14]何明霞,胡志远,无线USB数据传输系统在激光准直仪测量中的应用[J].传感器与微系统,2008,27(10):112-114.
[15]张会新,龚进,樊姣荣等,分布式数字无线测温系统[J].化工自动化及仪表,2011,38(12):1493-1495.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02 09:36:22
石家庄铁路职业技术学院学报(2021年1期)2021-06-09 06:06:38
新能源科技(2021年6期)2021-04-02 22:43:34
科学技术创新(2021年7期)2021-03-23 06:37:42
科技视界(2019年19期)2019-08-29 02:58:06
航空模型(2017年12期)2018-05-08 11:00:48
中国公共安全(2017年8期)2017-10-13 08:12:18
航空模型(2016年5期)2016-07-25 08:59:26
新媒体研究(2015年7期)2015-12-19 09:09:57
--关于材料发展史的对话
材料与冶金学报(2015年1期)2015-02-23 11:25:57