机电一体化设备故障特点及检修
2018-03-27 04:37谭志宏
建材与装饰 2018年9期
谭志宏
(广东鹰视能效科技有限公司)
1 引言
随着科学技术的快速发展,机电一体化技术结构也逐渐完善,在技术结构控制和故障诊断技术运用方面取得了十分明显的优势。由于机电一体化和一般机械设备不同,所以机电一体化设备的故障特点也有着不同性。利用故障诊断技术可以对设备故障展开集中的清查,进而降低安全事故的发生,某一程度上避免安全隐患。
2 机电一体化设备的故障诊断技术
2.1 机电一体化设备的故障特点
机电一体化设备使用的零部件数量非常多,而且技术含量也相对较高,统计显示,机电一体化设备发生故障的概率是通常机械设备的八倍。面对故障如此高发且复杂的设备,仅仅靠人工检查分析是不够的,所以需要探索一种专门的故障诊断技术,机电一体化设备的技术组成主要如图1所示。

图1 机电一体化设备的技术组成
机电一体化设备的故障特点有下面几点:
(1)自诊断功能较弱,只可以诊断出一些比较简单的故障;
(2)机械零件很多,比较容易磨损;
(3)有关经验技术人员愈来愈少;
(4)报警体现不明确,有些故障显示报警,有些故障没有显示报警。
2.2 机电一体化设备的故障诊断技术
故障诊断技术其实就是一种检测技术,即查看系统的运行状态并对异常情况进行判断,按照诊断为系统故障的恢复提供根据。对设备展开故障诊断重点有三个目的:①为了体现设备的最大效益;②为了保证设备的正常可靠运行;③为了可以及时诊断出将要发生或已发生的故障,从而降低维修时间,提升维修质量。故障诊断重点有四个任务:①故障检测,就是对使用中的系统或设备定期的传送检测信号,根据分析接收到的响应数据判断系统或设备有没有发生故障。②故障类型判断,就是在检出故障之后,分析故障原因并且判断出系统故障是哪一类型。③故障定位,就是在前两个任务的前提下,细化故障类别,判断出故障发生的具体原因和部位。④故障恢复,就是依据第三个任务,进行不同的措施,对系统故障实行恢复。故障诊断通常是根据检测设备的信号来判断设备的运行情况。设备诊断过程如图2所示。

图2 设备诊断过程
由图2能够看出,在对设备的故障展开诊断的时候,首先需要对诊断对象的原始特征信号展开测试,以取得诊断信号;然后从这些诊断信号之中获得征兆,就是从信号中分离出可以体现特征故障位置和种类的信号;之后再按照模式识别理论处理征兆,展开状态识别。倘若是无故障状态,则可以采用时序模型、滤波等方法展开深入分析,预测即将发生的故障;倘若状态是某一种故障,则可以运用信号分析、模式识别等方法分析故障的产生原因、位置及其类型,然后在这一基础上制定对策,以实现诊断目的,保证设备的正常运行。
故障诊断主要有以下两种测试方式:①故障测试,主要在故障发生之前,这个时候诊断对象处在运行状态,根据预测并及时发现故障的原因而对诊断对象展开的在线测试;②诊断测试,主要是在故障发生之后,这个时候诊断对象处在非运行状态,根据确定故障位置和种类而对诊断对象展开的试验性测试。
3 机电一体化设备故障检测原则
因为机电一体化设备具备的独特特点,因此我们对设备故障的分析应该要转变思维方式。应当要对机电一体化设备作透彻的了解分析,了解各个功能模块框图,依据每个构成部分的功能、工作环境和组合形式,分析故障影响程度和可能的形式,必要的时候可以作故障树分析,按照故障发生的现象,层层分析,把故障形式的逻辑关系以及可靠性相关的因素找出,了解产生故障的根源和实质。机电一体化设备的故障分析诊断法主要有故障树分析法、声检测诊断法、温度检测诊断法、白诊断法(故障指示灯、故障代码、报警等)、压力检测诊断法、振动检测诊断法、时域模型分析法和噪金相检测诊断法等。
在诊断的时候,应当要注意下面几点:①先机后电,因为机械结构的直观性,能够用肉眼看到显著故障现象,如变形、卡死、断裂以及打滑等,因此先从机械部分着手,对机械部分故障进行检查。通常来说,因为机械的工作特点,其是驱动元件及执行元件,更容易出现磨损引起变形而发生失效的现象;②先外后内,由执行元件到控制元件最后到驱动元件依次检查,把故障源头找到;③先主干后枝叶,首先分析主要部件,然后分析次要部件,特别重点分析接口部件和结合部零件。
4 数控数字伺服系统故障检修案例
4.1 故障设备
美国cs数控,使用FANUC的数控系统控制。
4.2 故障现象
设备随机性报警停车,显示屏上显示信息为401SEVO(VRDY OFF)414 SEVO AARM XDECT ERR 424 ALARM SEVO Z DETECT SEVO ERR 434 ALARM 3轴ERR面板上HC报警灯发亮报警。
4.3 故障检查与分析
分析401号报警的问题可能是伺服控制单元上的电磁接触器断开,伺服控制单元没有加上电源,伺服控制板或主控制板的接触不良。434#;414#;424#报警是z轴的伺服系统应该有故障,则z轴的输入电压不够,造成伺服电动机无法运转。而HC报警的故障现象是伺服板上有电流穿过放大器。通过检测MCC的线圈、浪涌吸收器,连接导线等元件均没有发现问题。经过进一步检测,才发现热保护动作的问题。
4.4 故障处理
通过调整MCC热保护开关,使其完全复位,故障排除。
5 设备失控故障案例
5.1 故障设备
德国产PNE 710数控设备,使用SINUMERIK 5T控制系统。
5.2 故障现象
加工的过程中,设备突然出现拖板高速运动,发生撞卡盘以及刀架的严重问题,由开始的几个月一次,发展到每周几次,出现故障时必须按急停按钮停止,对安全生产影响很大。
5.3 故障检查与分析
设备已经过长时间自动运行使用老旧,经过分析故障不是出程序和工人操作。经过分析,x坐标运动指令,是由A板输出接到机床侧驱动板的8#5#接线端子,可以测量到这一点的电压是否正常,便可知道故障所在。但故障是随机的,测量很困难。对故障的现象进行分析,可能机床侧驱动板接触不好引起,设备的局部系统的结构框图如图3所示。
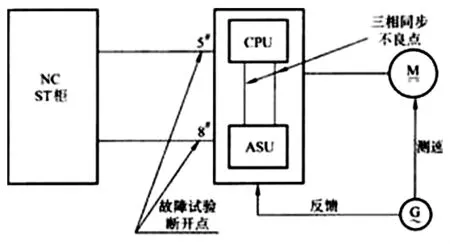
图3 局部系统的结构框图
局部系统的结构框图可知一块为ASU板,一块为CPU,CPU完成驱动的速度调节,信号部分接触不良可能性最大,是引起接触不良的关键。数控柜发出模拟量移动指令的输出线,在驱动板的一侧断开5#、8#线,用绝缘物体在设备通电的情况下,敲击驱动板的插头位置,出现了拖板高速移动的现象,查找到问题的根源就在这里。
5.4 故障处理
修整插头后重新连接,故障问题排除,一直使用到现在没有出现问题。
6 结束语
对机电一体化设备进行综合分析与故障检修的过程之中,技术人员要全面利用针对性的检修方案和有效的检修技术,提高实际效果和检修效率,某一程度上促进机电一体化设备故障诊断的智能化发展,为机电一体化的可持续发展打下坚实基础。
[1]陈 茹.机电一体化设备的故障诊断技术分析[J].企业文化(中旬刊),2015,30(2):254.
[2]程有康.机电一体化设备的故障诊断方法分析[J].科学之友,2012,1:49~50.
[3]刘 佳.浅谈机电一体化设备的故障诊断方法[J].科技天地,2011,18:443~444.
[4]施力仁.机电一体化设备的故障诊断技术探析[J].电子世界,2013,26(22):195.
猜你喜欢
一重技术(2021年5期)2022-01-18
装备维修技术(2020年30期)2020-07-07
中国医疗器械信息(2020年3期)2020-03-20
中国医药导报(2019年33期)2019-12-26
建材发展导向(2019年10期)2019-08-24
中国交通信息化(2019年6期)2019-08-23
山东工业技术(2019年7期)2019-05-29
电子制作(2018年10期)2018-08-04
电子制作(2018年10期)2018-08-04
振动、测试与诊断(2014年5期)2014-03-01