体感远程控制人形消防机器人应用初探
2018-03-24 05:31蓝恺迪庆州公安消防支队特勤中队
消防界(电子版) 2018年2期
■ 蓝恺 迪庆州公安消防支队特勤中队
近年来,随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致危险化学品、放射性物质泄漏、隧道火灾、矿难等处置难度极大,危险性极高的事故时有发生。根据《中国消防年鉴2014》统计得出,2000年以来,全国发生火灾169万起,在应急救援一线上牺牲的消防员达200余名,700余名消防员伤残。在大型灾害面前,尤其是在有二次爆炸、坍塌等潜在危险的场合,单靠人类血肉之躯灭火和救援,力量十分薄弱,还可能在救援过程中造成二次伤亡,“火场换人”需求与日俱增。各消防部队现已陆续配备消防机器人到应急救援一线,但消防机器人真正参与灭火救援的次数却很少,实战应用程度远未达到预期值,现有消防机器人主要存在性能单一、价格奇高等问题,各类救灾机器人功能还不完善,多数为一个履带底盘加摄像头、排烟机、水炮等构成的履带车,只能完成整个消防救灾过程中的某一环节,体积庞大,运输存在一定困难。
为解决这一问题,使消防机器人方便投入实战,美国波士顿动力公司和海军研究室(NRL)、日本本田公司分别研究出了可以用于消防各环节的智能人形机器人Atlas、SAFFiR和E2-DR,这三款机器人可以实现直立行走、翻越障碍物、爬梯、操作复杂器材等功能,基本可以代替人类使用。
以上机器人都是利用程序控制和传感器反馈的智能机器人,价格及为昂贵,编程和调试需要较高专业知识,本文基于中国消防实际提出一种较为廉价的人形体感控制多用途消防机器人的设计,消防员通过穿戴采集动作用的外骨骼,可以实现体感控制,加上VR头盔传输图像,使消防员能身临其境地控制机器人进入危险场合,如同控制自己手脚一般控制机器人进行灾害处置,人形设计一方面方便于利用现有器材装备,使用现有操法和战斗编程,另一方面无论哪里发生严重事故,灭火救援专家都可远程控制进行第一时间处置。
一、体感控制消防机器人设计过程
因制作人体大小、具有较强负载能力且精度较高的机器人需要谐波舵机等昂贵部件,笔者仅利用普通数字舵机制作1/3大小模型进行演示说明。机器人上体为人形,具有双手及头部摄像头,共有21个自由度(即关节数),下体若采用双脚设计步态平衡控制存在较多困难,故下体暂采用履带底盘。完成整体如图1所示。
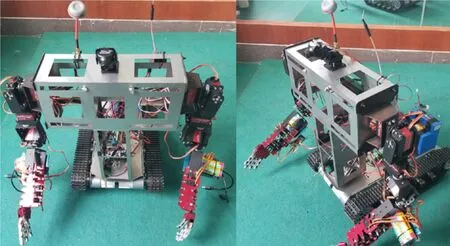
图1 体感消防机器人整体
(一)躯干设计
机器人躯干利用不锈钢制作,设置较多孔洞以便于排线及减轻重量,顶部和底部设置舵盘接口,便于在底盘上安装可供腰部转动的舵机。
(二)手臂设计
双手采用扭矩20kg/cm舵机作为动力单元,每只手有9个自由度,包括手臂4个自由度和手指5个自由度,可以完成大臂转动、抬起;小臂抬起、旋转;手腕旋转和每个手指单独抓握动作。
(三)头部设计
头部采用ArkbirdFPV头部追踪器和视频图传,机器人头部摄像头有两个自由度,图像信息通过图传发送到VR视频眼镜上,VR眼镜上带有陀螺仪传感器,可以随时检测操作者头部姿态,操作者带上VR视频眼镜,机器人摄像头即可同步跟随操作者头部转动,看向操作者头部转动的方向。如图2,从侧视图和顶视图进行演示,摄像头跟随VR眼镜运动,VR眼镜运动轨迹为红色箭头,头部摄像头运动轨迹为蓝色箭头。

图2 摄像头头部追踪演示
(四)外骨骼手臂动作采集器
用于采集操作者身体动作的传感器为3D打印外骨骼,外骨骼共有8个关节,分别对应机器人两手臂的8个自由度,外骨骼关节处利用磁位器做位置传感器,操作者运动手臂可使磁位器转动,磁位器将位置信号通过蓝牙模块无线传输到机器人的舵机控制板,控制对应关节的舵机同步转动到和操作者关节相同的角度。

图3 外骨骼手臂动作采集器
(五)数据手套手指动作采集器
用于采集操作者手掌动作的传感器为数据手套,手套里手指部位贴有弯曲度传感器,弯曲度传感器由应变片加工而成,根据手指的弯曲,使得传感器发生形变,传感器的阻值会发生变化,且阻值的变化和手指的弯曲程度呈正相关关系,利用CPU检测传感器阻值的变化,从而可得到手指弯曲情况的信号,将此信号传递给机器人手部舵机控制板,机器人手指即可跟随操作者手指运动。数据手套背部还贴有陀螺仪传感器,可检测操作者手掌位置,使机器人手腕同步转动。
(六)控制实验
据实验(图4、5、6),本文所制作体感消防机器人模型具有一定越障能力,在50米范围内控制,机器人头部及手臂可跟随操作者同步运动,操作者可控制机器人完成一些复杂动作,机器人模型的手臂末端负载约0.7kg。

图4 体感消防机器人控制实验

图5 体感消防机器人控制实验
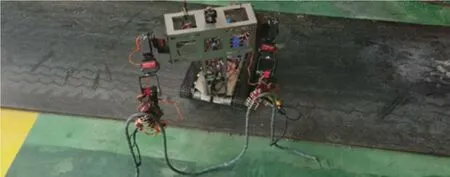
图6 体感消防机器人控制实验
二、体感远程控制机器人应用优势
(一)操作简单
机器人使用远程体感控制,操作者只需按平时训练如同自己进入火场一样进行控制,利用现有战斗编程将机器人投入灭火救援战斗即可,可以使操作者远离危险,达到减少伤亡目的。
(二)通用性高
由于是人形外型,机器人可作为一个万能装备平台使用各类现有器材装备,使得机器人可以用于灭火救援各个环节,克服传统消防机器人只能用于排烟、侦查、出水等单个环节的不足。
(三)专家远程控制实现第一时间处置
如同医用手术机器人一般,在地球一端的专家可以操作地球另一端的医用机器人为患者做手术。体感控制机器人一样可以实现类似的主-仆式远距离操作模式,在各危化品单位和重点单位配备一定量体感机器人,当发生事故时,远在他乡的灭火救援专家可第一时间穿戴外骨骼控制器接入控制事故单位的体感机器人进行灾害处置,免去乘飞机到现场指导工作的时间。同样,未受过专业消防训练,没有应急避险能力的事故单位技术人员,也可远程控制体感机器人进入事故现场协助处置,可使技术人员免受生命危险。

图7 专家远程控制示意图
(四)模块化换装实现不同应用
体感机器人可结合其他类型消防机器人模块进一步升级为模块化机器人,针对不同灾害场合加装不同模块,例如装上红外摄像头模块或火焰传感器可探测火源位置;装上有害气体检测传感器进行气体检测;进入楼内内攻时可于前部加装超声波测距传感器探测地面坑洞,实现消防员前虚后实探步功能;在障碍物较多的场合底盘可更换摆臂履带底盘或四足机器人底盘提高越障能力;若用于深井救援可直接去掉底盘,利用绳子牵引机器人腰部,将机器人放入深井中,救援人员利用机器人在被困人员身上打上绳结,拖出深井。
三、体感远程控制机器人目前技术难题及缺点
(一)技术瓶颈未突破,难以造成完全人形
一是无论使用履带底盘或是摆臂履带底盘都无法实现复杂的爬梯,翻墙等操作。若给机器人加上双脚,则要面临极为复杂的步态稳定性与控制策略问题,具体主要有双足运动的动态稳定与控制机理、双足步行运动的固有鲁棒性机理、实时步态规划等问题,要解决这些问题制作消防机器人会大幅增加机器人成本。
二是采用电机作为关节驱动的机器人可以简单实现体感控制,但是无论电机采用何种减速器,机器人的负载能力仍然难以达到人类水平,若采用液压或者气压做仿生关节,机器人负载能力可大幅高于人类,但是液压或气压传动响应速度较慢,控制存在一定延迟,难以实现体感同步控制,要解决负载的问题需要等待新型关节驱动器如记忆合金驱动、压电陶瓷驱动的进一步发展。
(二)无线通信困难
一是本文设计的体感机器人在开阔地实验中受电磁干扰偶尔会出现失控现象,现实火场环境复杂,障碍物较多,电磁干扰更加严重,会严重影响机器人无线控制,解决这一问题可以通过有线控制机器人进入火场,但是过长的电线在收整过程中易受弯折导致断芯。
二是远程控制有一定延迟,本文做实验都是在百米以内距离,基本不存在延迟,但是距离远了就会存在令操作者感受明显的延迟,造成机器人不同步运动,操作困难。笔者于2013年进行机器人远程控制实验,在成都实验室通过搭建虚拟专用网络控制位于东京实验室里的机器人,两地距离约3300km,控制延时为100至150毫秒,此延迟只能基本维持同步控制,若要进行精确度需求很高的操作,延迟易造成操作者运动过度而产生误操作。随着网络通信设备及无线通信技术的不断发展,此问题有望解决。
(三)基层维护困难
基层维护困难是消防机器人的通病,消防机器人属高新技术结合体,对操控、维护保养人员技术要求极高。消防机器人的很多零部件,在经历火场实战后较易损坏,尤其是电子元件,容易受到潮湿、浓烟和灰尘等影响,基层消防部队没有专业知识难以自行更换,维护保养不当则容易在灭火救援中出现问题,不仅会给灭火救援增加难度,自身失控也会导致给被困人员造成危险。
四、结语
人类社会的科技和工业在发展,消防理念和消防器材也应顺应科技潮流而发展,科技手段理应在灭火救援中发挥更大的作用,只有从根本上改变思路,积极投身科技强警,才能避免悲剧的再次发生。加大消防机器人的投入,实现“铁打的营房铁打的兵”,作战主力换成只会听命令的机器人,即可从根本上解决安全问题,最大限度减少一线官兵伤亡,又可在一定程度上解决部队管理问题。随着人工智能、控制理论和材料学的发展,消防机器人定将朝着低成本化、智能化方向发展,有朝一日将在应急救援前线大展雄风。
参考文献:
栾洋.消防机器人灭火救援应用技术分析[J].科技展望,2017,(02).
徐晓明.消防机器人实战化应用初探[J].公安部消防局,2016,(09).
猜你喜欢
哈哈画报(2022年5期)2022-07-11
现代仪器与医疗(2021年4期)2021-11-05
影像研究与医学应用(2021年15期)2021-09-12
学生天地(2020年1期)2020-08-25
介入放射学杂志(2020年1期)2020-04-11
电子制作(2019年13期)2020-01-14
无线互联科技(2018年20期)2018-12-27
中国体育教练员(2017年3期)2018-01-19
电子制作(2017年13期)2017-12-15
数学大王·低年级(2015年6期)2015-07-09