
基于模糊PID算法的智能仪表通信技术研究
2018-03-23 03:45:58邵林
西安文理学院学报(自然科学版) 2018年2期
邵 林
(安徽冶金科技职业学院 自动控制系,安徽 马鞍山 243041)
触摸屏相对于PC机而言,其运算速度慢、存储能力弱,但触摸屏具有结构紧凑、能耗少、成本低、通信接口方便等优点.因此,在中小规模的智能仪表系统中,触摸屏正逐渐代替PC机作为智能仪表的上位机监控系统.在实际的应用过程中,由于触摸屏运算速度和存储能力的限制,当触摸屏与多台智能仪表同时通信时会产生较大的数据滞后,甚至出现死机现象[1].目前,国内企业主要利用两种方法来解决数据滞后的问题:一是利用PC机作为上位机,通过OPC和数据库技术对通信数据进行缓存和预处理;二是增加硬件设备,把控制系统分成多组,分别采用不同的硬件系统控制.这两种方法基本能够解决多路数据传送阻塞的现象,但其成本较高,且不利于智能仪表现场集中控制[2].国外智能仪表行业为了解决此通信阻塞的问题,主要通过提高自身通信数据预处理和数据缓存能力,从而缓解智能仪表与上位机的通信压力,但上述方法仅能解决小型设备(采集数据通道在32路以下),对于中型以上设备的数据通信还是难以满足要求.本文根据现场智能仪表通信的实际情况,设计一种基于模糊PID算法的智能仪表通信技术,经过长期运行和检测,不仅解决了中型以上设备以触摸屏为上位机的智能仪表通信阻塞问题,且有利于现场仪表的集中管理和控制.
1 工程概况及技术要求
为保障生产的安全进行,马钢煤焦化公司在生产车间装有大量检测有毒、有害气体的智能仪表,这些检测仪表能够实时反应现场的生产状况[3].同时,生产车间为了便于安全操作和集中监控,要求把智能仪表采集的信息传输至现场的触摸屏进行集中控制.
通常情况下,触摸屏与智能仪表之间通过RS-485数据端口遵循采样时间分时轮询的模式进行通信.在生产过程中为了保障人身和设备的安全,一般采用增大通信的轮询次数,减少通信的采样时间,以此提高检测数据的实时性.但触摸屏受自身存储能力和运算速度的影响,若在单个采样周期内对所有仪表都逐一扫描采样,不仅采样时间长,且加重了触摸屏的通信负担,甚至会引起触摸屏的死机.与此同时,在实际生产过程中,由于生产设备损坏以及其他干扰产生的误报警信号可能长时间占用通信资源,这将大大降低通信的效率.因此,为了提高通信的效率,必须设置相应的通信规则:即单个仪表连续获得通信优先级的次数不大于60次.若检测单个仪表的连续通信优先级大于60次时,系统自动发出报警信号并等待系统确认.
2 模糊PID算法的智能通信设计
2.1 马钢焦炉通信简介
马钢煤焦化公司在现场焦炉的顶部、中部、底部及其周边布置近100多个智能检测仪表装置.为了获得仪表实时检测信息和便于集中监控,所有仪表都通过数据总线连接至触摸屏上[4].若触摸屏按常规轮询方式对所有仪表进行通信采用,设每个仪表的采样时间为1 s,那么100个仪表每轮询一次需要100 s,而煤焦化生产过程中对大多气体的检测周期设置为10 s以内.因此在通信时间上存在较大矛盾,为了解决上述生产工艺的要求,本文设计了一种基于模糊PID算法的智能仪表与触摸屏的通信技术[5],从试运行的数据分析,此设计基本满足煤焦化生产工艺的需求.
2.2 建立动态数据库
首先建立动态数据库表如表1所示.动态数据库包括仪表地址、计时器、定时器、反馈值、事件等级、动态系数和优先级,其中
ΔUn=f((αn·In+βn·Dn+Pn)·ΔEn)
(1)
式中:ΔUn为第n#仪表与触摸屏通信的计算优先级,f为对应的函数关系;Pn、In、Dn均为模糊PID的初始设定值,其中Pn为事件等级,表示第n#仪表在生产过程中的重要程度,并按照工艺优先等级依次设定为10(最高级)、8(较高级)、5(一般级)、3(最低级),初始化时已经设定;In为计数器,表示第n#仪表发出通信请求脉冲个数;Dn为定时器,表示第n#仪表被延时通信的时间总和;动态系数αn表示第n#仪表计时器的动态加权系数值;动态系数βn表示第n#仪表定时器的动态加权系数.
ΔEn=ΔUn-ΔUn-1
(2)
式中:ΔEn为第n#仪表的反馈值,表示本次优先级与上次优先级的算术差.

表1 动态数据库
2.3 建立模糊规则表
模糊规则表如表2所示.根据ΔUn/ΔUn-1的大小进行模糊化处理,并依据模糊化的结果,查询相应的模糊加权系数αn和βn,其中αn和βn的大小,根据ΔUn/ΔUn-1进行自动动态修正.
ΔUn+1=(ΔUn-1+ΔUn)/2
(3)
(αn,βn)∝(ΔUn/ΔUn-1)
(4)
其中:ΔUn/ΔUn-1为本次优先级与上次优先级之比;Fuzzy为模糊化语言,ZERO、SMALL、MIDDLE、LARGE、LLARGE从小到大分别表示五个模糊化等级;ΔUn-1、ΔUn、ΔUn+1分别表示上次、本次和下次优先级值.
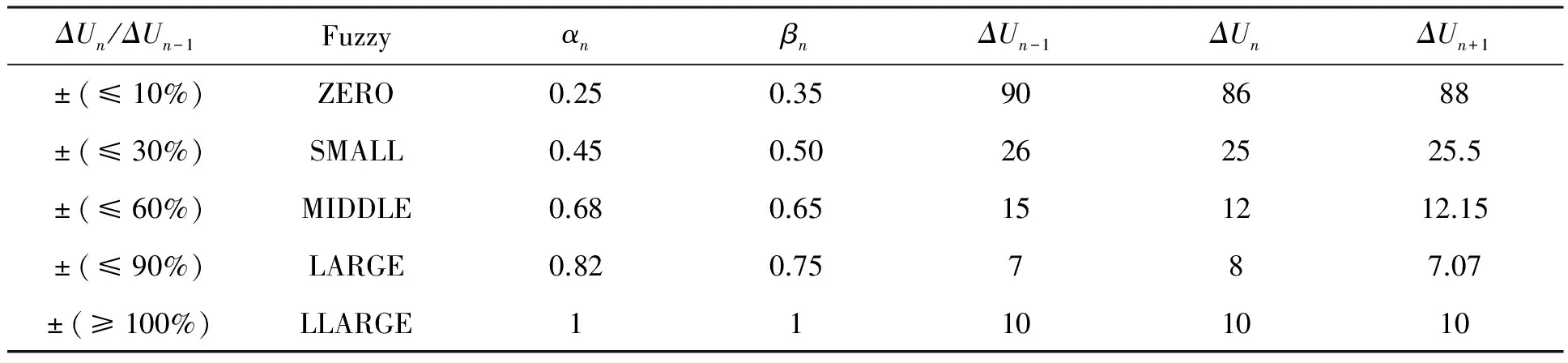
表2 模糊化规则表
3 模糊PID算法的通信模式
3.1 模糊PID通信的工作过程

3.2 通信数据模糊化
触摸屏将接收的检测仪表数据ΔUn与上次的存储值ΔUn-1相比,得出相应的ΔUn/ΔUn-1模糊化值,通过查询模糊规则表求出参数αn和βn,然后将相应的参数代入式(1)中,计算出ΔUn,作为此仪表本次轮询的优先级值;同时根据式(3)计算出ΔUn+1值,并存储在数据库中,作为下次计算ΔUn的参考值.
3.3 动态参数αn和βn
Pn、In、Dn3个参数中,参数Pn为检测仪表本身的危险等级,设置后正常情况下不能更改;参数In和Dn为检测仪表现场检测信号的动态值,这些值跟随现场检测状态的变化而变化.为使系统能够获得较好的动态效应,分别对In和Dn的值乘以动态参数αn和βn.由式(4)可知,系统根据ΔUn/ΔUn-1的变化不断修正参数αn和βn,而由式(1)可知,αn和βn值的自动修正将直接影响ΔUn/ΔUn-1的大小,从而形成闭环的自校正系统[6].该系统通过反复的学习和训练,使其获得较好的自主学习能力,能大大提高系统的动态性能.
3.4 模糊增量PID算法设计
根据增量式PID算法的工作原理,首先计算出反馈值ΔEn,由ΔUn/ΔUn-1的阈值范围,模糊化出动态参数αn和βn,根据式(1)求出本次的优先级输出值.系统根据此优先级的大小对仪表的通信获得权进行排序,排序在前8位的仪表将获得本次通信机会,由于本文采用动态参数αn和βn,使系统的动态性能得到较大改善.
4 现场应用分析与讨论
4.1 现场应用
为了检验系统设计的可行性,将基于模糊PID算法的通信模式应用于马钢煤焦化公司2#焦炉,实现单个触摸屏与多组(64个)智能仪表的通信.同时为了监控通信工况,本文利用Labview将信息记录在数据库中并进行动态分析.
4.2 分析与讨论
利用Labview对记录的通信数据进行计算和分析如图1和图2所示.其中图1为触摸屏与智能仪表采用本文设计的通信模式的数据分析图,图2为采用基本轮训的通信模式的数据分析图.由图1可知,在60 min通信时间内,系统最大通信时间为6.483 7 s,平均通信时间为6.103 2 s,通信时间均小于工艺要求的10 s,该通信模式基本满足工艺通信时间小于10 s的要求,但从分析图上可知系统的稳定性欠佳.由图2可知,系统最大的通信时间为10.376 s,平均的通信时间为8.159 3 s,最大通信时间大于工艺要求的10 s,且在7 min和41 min的采样点附近有两个明显的阶跃信号,表明触摸屏在此时间与智能仪表的通信产生了阻塞现象.
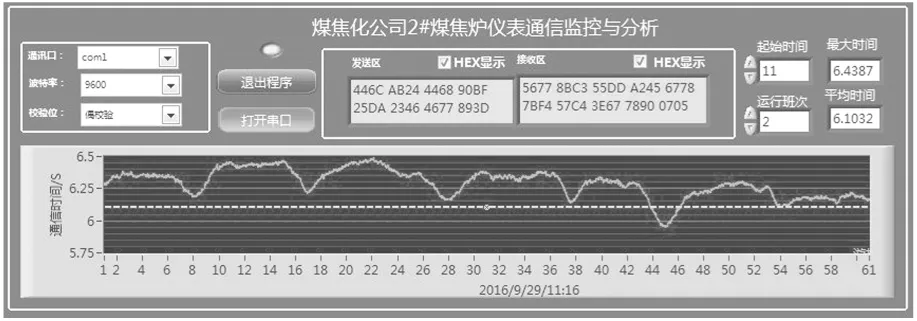
图1 模糊PID算法的通信

图2 基本轮训模式的通信
5 结论
为了解决通信阻塞问题,本文提出了动态优先级的通信模式,仅对有通信需求的仪表进行扫描采样.在优先级计算的过程中,采用增量PID算法,分别对仪表的自身优先级(仪表采集信号的危害等级)、计数器(获得优先级的次数)、定时器(申请优先级后的等待时间)分别用Pn、In、Dn3个参数表示.同时,为获得较好的动态效果,根据模糊控制理论,对增量PID的两个参数Pn和In的动态系数αn和βn进行实时校正,完成系统自主学习的过程[7].通过对马钢煤焦化公司试运行数据的分析,本文设计的智能仪表与触摸屏通信算法基本满足生产工艺的需求.但由于本文采用ΔUn/ΔUn-1进行模糊化阈值,系统稳定性不好,虽然利用αn和βn进行校正,控制精度依然不高,在以后的改进过程中将引入神经网络的控制理念[8],逐步提高系统的稳定性和控制精度.
[1] 肖威.PLC及触摸屏组态控制技术[M].北京:电子工业出版社,2013:89-97.
[2] 柳桂国,葛鲁波,金湖庭,等.智能仪表技术[M].北京:北京师范大学出版社,2015:62-74.
[3] 葛芦生,杨波.蓄热式加热炉燃烧控制策略应用研究[J].仪器仪表学报,2004,25(4):538-540.
[4] 张世峰,左慧敏.焦炉集气管压力系统内模控制器设计[J].安徽工业大学学报(自然科学版),2014,4(3):395-399.
[5] 李人厚.智能控制理论和方法[M].西安:西安电子科技大学出版社,1999:103-108.
[6] 欧艳华.基于神经网络的自适应PID控制器设计[J].机械设计与制造,2014,6(6):263-265.
[7] 盛飞.多层RBF网络的自适应遗传算法及其在实函数逼近中的应用[J].安徽工业大学学报(自然科学版),2013,2(4):192-196.
[8] WANG Y N.A neural network adaptive control based on rapid learning method andapplication[J].Int J Advancesin Modelling &Analysis AMSE Press,1994,43(4):23-28.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
无线互联科技(2020年12期)2020-11-25 16:29:37
现代装饰(2020年7期)2020-07-27 01:27:50
装备制造技术(2019年12期)2019-12-25 03:06:36
运筹与管理(2019年10期)2019-12-17 06:07:12
数码世界(2018年6期)2018-12-25 10:43:02
知识就是力量(2018年7期)2018-07-11 06:39:56
中国交通信息化(2018年11期)2018-03-01 05:43:42
电子制作(2017年14期)2017-12-18 07:08:00
河南科技(2014年12期)2014-02-27 14:10:32
