
基于蓝牙微功耗的室内定位检测系统
2018-03-23 06:32窦昱钦许寅曦白志帅
自动化与仪表 2018年3期
窦昱钦,张 峰,许寅曦,白志帅
(西安工业大学 电子信息工程学院,西安710032)
室内定位,指在室内环境中实现的位置定位,是集成了无线通讯、基站定位、惯导定位等多种技术的一套室内位置定位体系。
传统的定位技术有红外线、超声波、Wi-Fi(wireless fidelity)等,大都存在成本高,定位不准确等问题。随着无线通信技术与智能网络技术的发展,基于蓝牙BLE(bluetooth low energy)的室内定位具有设备体积比较小,功耗低,建立连接时间短等优点,然而蓝牙BLE用于室内距离及定位信息获取尚存在一些关键技术难点和定位精度不高的问题。在此,利用嵌入式软硬件技术、4G技术开发了一整套室内定位检测系统,为室内定位技术提供了一种更优的方案。该系统可用于室内物体监测定位等领域中实现防盗、防丢失监控等功能,解决实际的工程问题。
1 基于BLE的系统设计方案
1.1 整体方案
所设计的蓝牙BLE定位系统整体设计方案如图1所示。系统主要由iBeacon定位系统、嵌入式控制平台、4G模块、电源模块等组成。

图1 室内定位检测系统总体设计方案Fig.1 Overall design scheme of indoor location detection system
该方案采用STM32作为主处理器,实现对系统的控制和数据的处理;系统数据采集部分采用NORDIC公司的NRF51822蓝牙芯片。在室内定位检测系统中,将1块蓝牙BLE模块固定在被定位物体上作为探测目标。蓝牙锚节点1连接处理器,并通过接收目标蓝牙模块RSSI值实现对被定位物体的位置监控。蓝牙锚节点1与另外布设的3个蓝牙锚节点构成四点定位,提高了定位的准确性进而增加系统的可靠性。
蓝牙主机和锚节点搜索、接收目标蓝牙模块所发送的信号并获取RSSI值和ID值,然后锚节点将自己的ID和获取的RSSI值通过蓝牙通讯发送给蓝牙主机,蓝牙主机再将接收到的数据通过串行通信技术发送给ARM处理器。ARM处理器利用信号强度衰减模型,计算出各节点至目标蓝牙模块的距离,再采用定位算法计算出目标物体的位置,由此实现室内定位功能。
1.2 基于iBeacon的场强值获取
在整个定位系统中,被定位物体与锚节点之间的距离测量是基础,而这个距离的测量需要利用接收信号的场强值,该值是基于iBeacon体系实现的。
文中采用iBeacon服务体系将蓝牙BLE技术应用于室内定位中,其基本工作方式如图2所示。

图2 室内定位iBeacon工作方式Fig.2 Indoor positioning iBeacon working mode
配有蓝牙通信功能的设备,作为iBeacon服务器向周围发送自己特有的ID和RSSI信息。接收到该ID的iBeacon基站,通过软件根据该ID采取相应的行动或执行相关的响应。同时,基于这样的工作方式,将1个支持BLE的蓝牙4.0模块作为定位系统中的iBeacon服务器,其通过BLE协议周期性地广播发送信号。由室内合理布置的BLE模块接收iBeacon服务器发送的信号,通过信号的强度测定自身与服务器的距离,再将各模块的数据综合并借助相应的定位算法,实现室内较精准定位。
1.3 空间立体定位的实现
传统的三点定位算法难以实现空间立体点位,在此引入四点定位算法,且对锚节点的布局进行合理设计。室内定位的布局如图3所示。

图3 室内蓝牙节点布局Fig.3 Indoor bluetooth node layout
图中,将1块蓝牙主机固定在被定位物体5上作为探测目标,周期性地向四周辐射电波。4个蓝牙锚节点垂直摆放,使它们的信号都能辐射整个被定位物体的活动区域,这样蓝牙主机与蓝牙锚节点就能够进行无线通信。蓝牙主机搜索蓝牙锚节点所发送广播信号,为了降低蓝牙锚节点的功耗,距离的计算与定位在ARM处理器中完成,蓝牙锚节点直接将获取的RSSI值和自己的ID通过蓝牙无线通讯发送给蓝牙主机,蓝牙主机将接收到数据发送到一个与处理器相连接的蓝牙锚节点,最后该节点通过串口将接受的数据发送到ARM处理器,处理器将场强值转化为距离。
2 硬件平台设计
系统位置信息采集部分采用Nordic公司的NRF51822蓝牙芯片。NRF51822是一款强大、灵活的多协议单芯片解决方案,采用32位ARM Cortex-M0处理器,配备256 kB Flash和16 kB RAM,嵌入式2.4 GHz收发器支持低功耗蓝牙协议栈和2.4 G协议栈。NRF51822所有数字I/O引脚可自由定义和映射,便于开发;其蓝牙协议和应用代码的存储空间相互分开,互不干扰,使用简单。
NRF51822外围及射频电路如图4所示。

图4 NRF51822外围电路及射频电路的设计Fig.4 Design of NRF51822 peripheral circuit and RF circuit
图中,NRF51822供电范围为1.8~3.6 V,芯片通过XC1和XC2为其并联外接16 MHz晶体振荡器提供时钟信号。模块射频天线设计是利用ANT1和ANT2差分天线接口外接倒F天线,并通过片上功率放大器输出端口ADD_PA为天线提供软件可调发射功率。NRF51822的P0.09和P0.11被映射为芯片串行接口分别连接处理器的接收和发送端口。
2.1 数据处理模块选型及电路原理设计
系统处理器部分负责对相关数据的处理,而数据处理中的定位算法需要大量的运算。为了满足定位的实时性,系统选用意法半导体推出的基于Cortex-M4内核的STM32F407ZGT6高性能微控制器。STM32F407集成了单周期 DSP指令和 FPU,168 MHz的高速性能便于进行数字信号控制器应用和快速的产品开发,提升了控制算法的执行速率和代码效率。主控模块原理设计如图5所示。
图中,STM32F407通过USART串行接口获取蓝牙主机接收的各节点数据,通过定位算法计算出放射源的位置,然后做出状态判断。STM32F407另一路串口连接SIM7100模块,可发送AT指令控制模块工作。处理器的时钟电路通过并联外接32 MHz石英晶振和2个10 pF电容构成,复位电路采用按键电平复位。
3 基于RSSI定位算法
3.1 RSSI测距算法

式中:n为信号传播系数;d为接收者与发送者之间的距离;A为距离发送者1 m时的信号强度。测距精度的高低受n与A实际取值大小的影响较大,为经验参数,可以通过测量距离发送者1 m时的Sr,s得到;n是用于描述信号强度随距离增加而递减的参量,其值依赖具体的测量环境。
根据实测的数据绘制出RSSI衰减模型曲线,如图6所示。

图5 主控制模块原理设计Fig.5 Main control module principle design
3.2 提高测距精度与算法优化
式(1)所示的RSSI衰减模型在相关参数合理确定的情况下为图6所示的曲线。由于室内环境较为复杂,在建立模型时往往由于A与n不够准确,使得Sr,s实测值呈现出图6所示的特征,势必影响定位的准确度。为此,需要对参数A和n进行优化,拟采用最小二乘多项式拟合的方式对数据进行曲线拟合。 设每次测量的值为(xi,yi),有

图6 RSSI衰减模型曲线Fig.6 RSSI attenuation model curve

则当拟合函数为多项式时,即为多项式拟合。即令
也即


式(5)是关于 a0,a1,a2,…,an的线性方程组,其矩阵形式为

该方程组的系数矩阵是一个对称的正定矩阵,存在唯一解。 解出 ak(k=0,1,2,…,n),即可确定式(2)的多项式,进而确立衰减模型。
经过对衰减模型参数A和n的进一步优化处理,可以使模型的相关参数更加准确,定位的准确性得以提高。后续的实测结果也验证了A和n的进一步优化为整体系统定位的精度提供可靠的保障,
3.3 室内定位算法
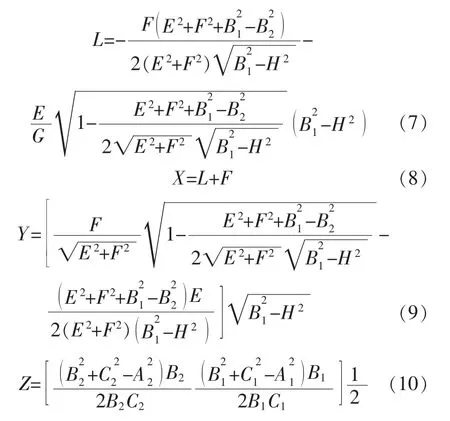
四边定位原理如图7所示。

图7 四边定位原理Fig.7 Four-edge positioning principle
如图所示,蓝牙锚节点1—4分别到蓝牙主机(被定位物体)的距离为 A1,B1,A2,B2,根据三角形的几何关系,蓝牙主机的位置坐标(X,Y,Z)为
4 系统测试与分析
4.1 试验结果与测试
在室内环境下进行数据测试,对其中一对主从机的蓝牙模块之间每隔10 cm距离进行场强值的测试,得到距离与场强值之间的数据信息,见表1。

表1 测试结果Tab.1 Test result
表1以x,y轴为平面,z轴为垂直方向,并在垂直方向每间隔0.1 m平面方向随机取值并进行测量,对比测量结果误差,结果在非理想情况下依据距离的变化而使信号的衰减产生依次递减的趋势。虽然尚产生一些波动,但对比之前未优化参数的情况要好,定位精度达到亚米级,能够满足日常定位需要。
5 结语
基于蓝牙BLE技术,借助于iBeacon体系、RSSI测距算法及四点定位原理,完成了一套室内定位的设计与开发,并进行了功能与定位精度的测试试验。研究表明,利用蓝牙BLE技术开发室内定位系统具有低成本、低功耗、布局方便等优点;利用四点定位算法,结合合理的锚节点布局,能有效的实现空间立体定位;利用曲线拟合对RSSI测距公式进行优化,可提高系统的定位精度;优化后的BLE室内定位定位系统实际应用中可达到亚米级定位精度。所开发的定位检测系统已成功应用于室内定位工程项目中,解决了放射源位置实时监管问题。对该系统稍加改造与拓展,可用于其他需要较高定位精度的场合。
参考文献:
[1]蔡晓波,吕海泉,李静,等.基于SIM908的GPS放射源定位仪设计[J].舰船防化,2012,32(4):6-11.
[2]何海洋,周洪亮,张宏建,等.基于RFID/GPRS的放射源监控系统[J].核电子学与探测技术,2011,31(11):1223-1227.
[3]张丽英,王宪伟,庄乾章,等.基于RFID,GSM技术的放射源防盗示踪系统设计[J].微计算机信息,2010,26(7):187-189.
[4]李豫海,曾志刚,张雪萍.从一起放射源失控事故看流动放射源安全监管[J].核安全,2009,7(2):35-36.
[5]潘强,张宏祥,彭元敏.放射源在线监控系统设计与应用[J].环境工程,2012,31(s2):44-48.
[6]刘华,赵永明,潘苏,等.放射源安全管理现状及对策[J].辐射防护,2002,22(5):272-276.
[7]周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天大学出版,2008.
[8]曹結.基于低功耗蓝牙和位置指纹的室内定位系统的研究与实现[D].昆明:云南大学,2014.
[9]郭利敏,刘悦如.iBeacon在图书馆的应用研究[J].上海高校图书情报工作研究,2015,25(1):39-43.
[10]Sluis B,Sarah.Apples iBeacon expands retail opportunities for location-based services customer relationship management:the iOS7 feature can facilitate marketing and mobile payment processing[J].CRM Magazine,2013,17(12):12.
[11]卞合善.基于蓝牙4.0低功耗室内定位研究[D].北京:北京邮电大学,2015.
[12]陈国平,马耀辉,张百珂,等.基于指纹技术的蓝牙室内定位系统{J}.电子技术应用,2013,39(3):104-107.
[13]张彦玲,乔哲.基于iBeacon技术的智慧会展前景眺望[J].现代经济信息,2016,37(12):323.
[14]Moreno E,Lima F A,Dias W R Azevedo.Performance analysis of a low cost cluster with parallel applications and ARM processors[J].IEEE Latin America Transactions,2016,14(11):4591-4596.
[15]刘玉宏,于彬.一种RSSI室内三边定位方案的手机与实现[J].计算机与现代化,2011,27(10):28-30.
[16]Pieterse Heloise,Olivier Martin S.Bluetooth Command and Control Channel[J].Computers&Security,2014,45(75):75-83.
猜你喜欢
工业设计(2022年7期)2022-08-12
核安全(2022年3期)2022-06-29
核安全(2022年3期)2022-06-29
核安全(2021年6期)2021-12-31
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
汽车零部件(2014年1期)2014-09-21
同位素(2014年2期)2014-04-16
计算机世界(2011年49期)2011-12-26
微型计算机(2009年17期)2009-05-19
