基于国产SW-LiDAR系统的安置角检校分析
2018-03-23 08:23:59马炳武罗志清李志杰
软件 2018年2期
马炳武,罗志清,李志杰
(1. 昆明理工大学国土资源工程学院,云南 昆明 650093;2. 北京四维远见信息技术有限公司,北京 100039)
0 引言
机载激光雷达扫描测量系统,又称机载LiDAR(Light Detection And Ranging)。SW-LiDAR系统在中国测绘科学院的指导帮助下,作为国产机载LiDAR的先行者更是日趋成熟,系统集成方面可以满足高精度轻小型,硬件和一些辅助软件也通过项目在不断创新和改革。像南方公司等部分国内公司也投入使用了自主研发的国产机载雷达系统,但数据后处理的软件基本都是使用国外进口软件,同时大量人工干预环节的存在不可避免的引入数据后处理的误差。本文采用地面检校场求解安置角的方法,通过安置角对特征地物点云造成的偏移来检校系统误差主要来源的安置角误差,结合山东省东营市采集的数据,并给出了具体的检校过程[1-3]。
1 SW-Li DAR系统的集成与工作原理
SW-Li DAR系统主要由控制设备运行的军工笔记本、AP-3500机载激光扫描测量仪、POS2010高精度位置测量系统、GPS接收机、SWDC航摄相机、供电设备等组成。软件包括控制激光器以及相机在设定航线上进行数据采集和相片曝光的Win-Nav软件;数据预处理软件包括UI软件、组合导航数据处理软件IE,前者主要用于处理激光数据将其从IMP文件中解算出点云lasxyz文件,后者主要用于导航数据解算,将角度距离数据进行误差修改,然后融合POS数据,经过坐标的转换可最终生成CGCS2000等坐标系下的高斯投影点云,影像预处理软件Phocus对影像进行匀色等处理,用terrasolid软件对点云进行查看和处理[4-6]。
机载 SW-Li DAR系统采用的是四面塔镜的扫描方式,扫描视场角可达 90°,同时 360°的扫描范围提高了扫描效率。外业采集时将集成的 SW-Li DAR安置在机舱底部或者稳定平台上,通过四面塔镜将激光器发送的脉冲信号反射到地面形成弧形扫描平行线,再由光学接收器收集地物反馈回来的信号,利用每个脉冲信号发射接收的时间和位置来确定目标的空间信息。将惯性导航系统测定出飞行平台的空中姿态角信息、GPS接收机记录的飞行数据以及激光测距仪测得的距离信息进行联合解算就能得到激光点云的三维坐标信息[7-9]。
2 SW-Li DAR构像方程
SW-LiDAR系统完成对地定位时坐标系转换顺序为:瞬时激光束坐标系→激光扫描坐标系→载体坐标系→惯性平台坐标系→当地水平坐标系→当地垂直坐标系→WGS84坐标系。WGS84坐标系还可以再转换为方便使用的局部坐标系[10]。各坐标系转换关系如图1所示。
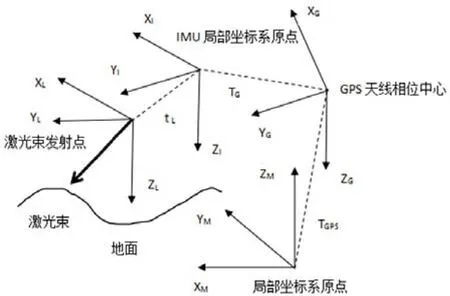
图1 坐标系转换关系Fig.1 Coordinate transformation relation
假设一束激光从发射点到目标点的距离为ρ,可以得到激光脚点的坐标为(xSL, ySL, zSL),并有:

由此可以得出LiDAR的构像方程为:
可以用向量简单表示为:

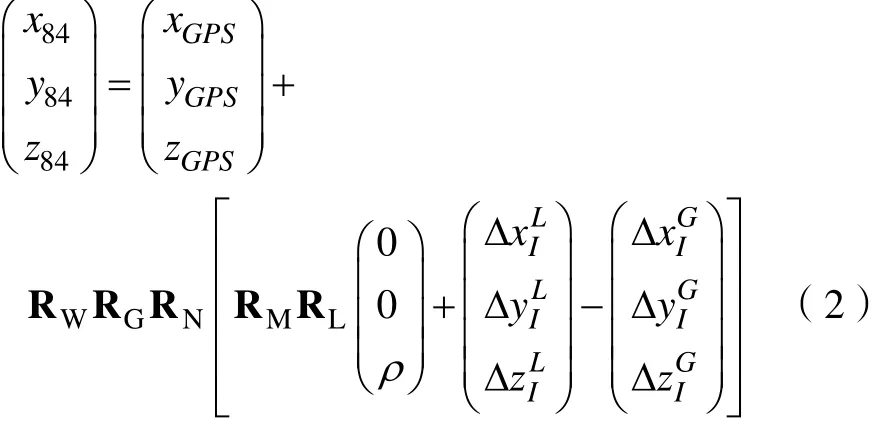
式中,P=(84x84y84z)T是激光脚点在 WGS84坐标系中的坐标;GPSP =(GPSxGPSyGPSz )T是天线相位中心在WGS84坐标系中的坐标;r=(0 0ρ)T是激光脚点在瞬时激光束坐标系中的位置向量。
3 检校方法
3.1 检校场概况
检校场选择在东营市的黄河口镇,试验测区地势平坦属于平原,平均海拔接近 1 m,没有大功率磁场等干扰,并且可以借助青岛的CORS站数据。起降地点选择在镇附近的灭蝗机场,方便飞机的起降,也提供了稳定的后勤保障;测区内有两条笔直的公路、多个人字形尖顶房屋以及大型平顶建筑,是安置角检校的有利条件;检校场的位置离海边还有十几公里的距离,附近大面积水域相对较少,很大程度上消除了由于激光信号反射对检校精度影响[11]。
3.2 航线设计
安置角包括侧滚角(Roll)、俯仰角(Pitch)和航向角(Heading),综合每个安置角检校的原理来设计航线。侧滚安置角检校时,设计两条对向飞行完全重叠的航线并且要垂直于测区的公路;俯仰安置角检校时,设计两条对向飞行具有旁向重叠的平行航线并且要垂直于测区内人字形房屋屋脊线;航向安置角检校时,设计两条同向飞行具有旁向重叠的平行航线并且要垂直于测区内人字形房屋屋脊线,同时保证航线垂直的人字形房屋在两条航线的旁向重叠区域内。相邻航带保持30%的旁向重叠度,同时为了提高检校精度航高可以设计的高一些[12]。具体航线设计如图2所示。

图2 检校场航线设计Fig.2 Calibration field route design
本着节约成本的原则加上实践经验总结,设计了上图的五条航线(橙色为航线,黄色为边界线),其中以编号5、6为边界点的航线是往返飞行的航线(5-6和6-5为两条往返并重合的航线)。飞行器采用的运-5飞机。检校场领航数据表如表1和检校场飞行参数表如表2。
3.3 安置角的检校步骤
飞行结束后首先要检查各项数据记录的完整性和数据质量,对POS数据、基站数据和GPS数据利用IE软件进行组合导航,判断出飞行轨迹的精度,然后对点云进行预处理,使用UI软件将原始数据中的角度、时间文件(IMP类型文件)解算成距离、角度并改正成高斯投影下的距离和角度,结合组合导航飞行轨迹数据,将点云坐标转化为高斯平面直角坐标,再用UI软件解算出LAS类型文件,最后利用terrasolid软件中T-scan模块查看点云的安置角情况。
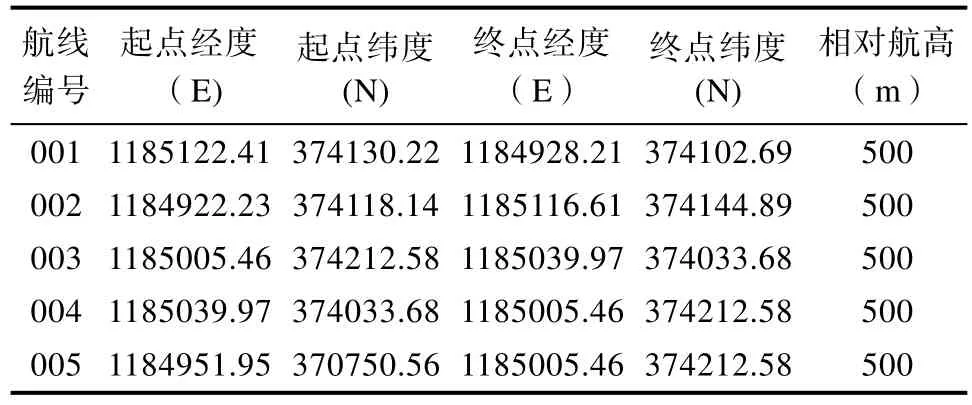
表1 检校场领航数据表Tab.1 Pilot test field data table
激光光束空间方位存在的误差,会导致相邻航带扫描的重叠部分的同一地物的坐标和高程出现差异,因此不同航带重叠部分覆盖的同个特征地物的激光点云就是检校安置角的最佳选择。经过多次检校分析的经验发现,不同的检校顺序对会影响安置角检校的效率,通常是按照侧滚角、俯仰角、航向角的检校顺序,即便是按照这个顺序在得到三个改正值后还需要统一验证,有时还要对不满足要求的安置角再进行微调。任何一个安置角的检校改正都会在一定程度上影响另外两个安置角的检校结果,只有多次反复验证才能平衡得出最佳的三个角度值[13]。
表2 检校场飞行参数表Tab.2 Flight parameters calibration field
(1)侧滚角(Roll)检校
侧滚角(Roll)又叫横滚角,对点云产生类似于飞机左右轻微翻滚的影响。具体表现为航带左右两侧点云高度偏离真实高度,一侧比真实高度偏高,另一侧比真实高度偏低。在Terra Scan软件中加载出满足检校要求的两条航带的点云数据,将点云设置为按航带展示的模式(会有两种颜色的点云出现),并沿着道路方向在路中间切取多个垂直断面,得到许多两种颜色相交的线型点云,所得夹角数值的一半就是所求的侧滚角。侧滚角检校切取的道路断面点云如图所示。
式中, zL- zR是指同一条扫描线上左右两侧激光脚点间的高程差;H是航高;θmax是系统的最大扫描角。将得到的改正值重新输入到UI软件,得到改正后的点云,再用Terra Scan软件进行查看,重复检校直到切取的点云基本重合或者两条航带点云高差满足精度要求为止。

图3 侧滚角检校前Fig.3 Roll before calibration
图4 侧滚角检校后Fig.4 Rolling angle after calibration
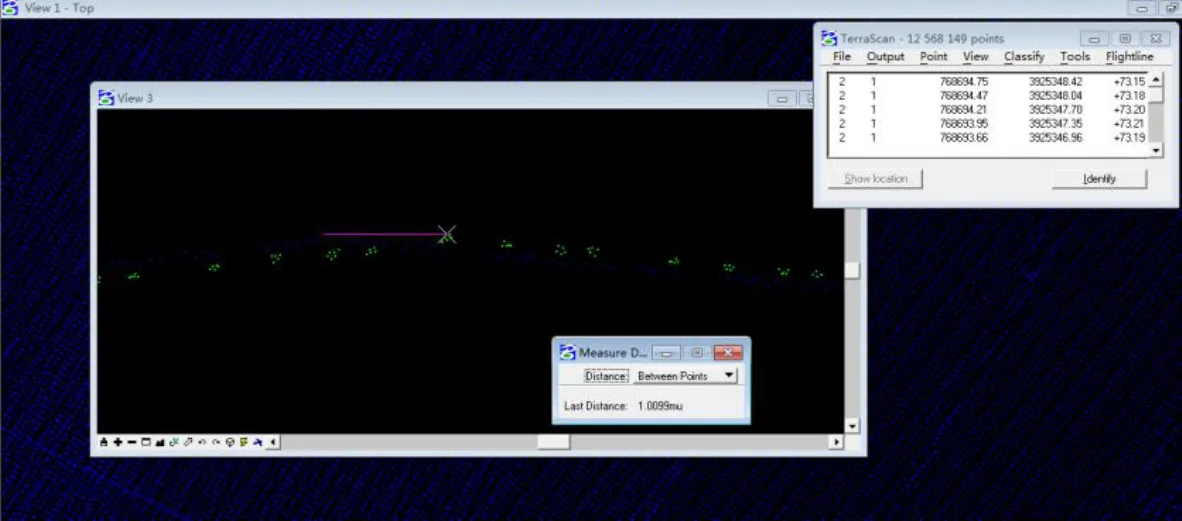
图5 俯仰角检校前Fig.5 Pitch angle before calibration
图6 俯仰角检校后Fig.6 Pitch angle after calibration
(2)俯仰角(Pitch)检校
以侧滚角改正后的点云数据为基础,重新选择加载垂直于屋脊线切飞行方向相反的两条航线上的点云数据。沿着屋脊线的垂直方向切取多个断面,会得到水平方向有明显位移的两个屋脊线,求出多个水平位移的均值即为所求俯仰角。

式中,D表示前向后向飞行时同一地物中心位置间距离差;H为平均航高;maxθ为系统的最大扫描角。在侧滚角改正值的基础上,加入俯仰角改正值,反复进行检校,直到尖顶房屋的屋脊线最大限度重合。
(3)航偏角(Heading)检校
选取改正过侧滚角和俯仰角的点云数据,加载出垂直于屋脊线且沿相同方向飞行的两条平行航带的点云数据。航向角误差会改变地物的中心位置,同时使地物发生形变。综合考虑选取两条航线重叠区域地物激光脚点点云几何中心的位移来检校航向角,具体步骤是:单独加载沿地物左侧飞行的航带点云,标记出地物的几何中心,再单独加载沿地物右侧飞行的航带点云,标记出此时该地物的几何中心,量取两个几何中心的距离值,就是飞行的偏移量。如果选取是沿相反方向飞行的两条平行航带的点云数据,得到几何中心的距离就是单向飞行偏移量的两倍。

式中,S为两条航带同一地物几何中心位置的距离;D为两条航带间的距离(选取同向飞行的两条航带数据时)或为地物中心位置与距离中心点最近的飞行天底点之间的距离(选取相反方向飞行的两条航带数据时)。在侧滚角和俯仰角改正值的基础上反复对航向角进行检校,直到地物的几何中心重合。
对于安置角规定:侧滚角:±85°,右滚为正;俯仰角:±85°,抬头为正;航向角:±180°左航为正。根据飞行方向确定正负,最终得到三个改正值[14-15]。
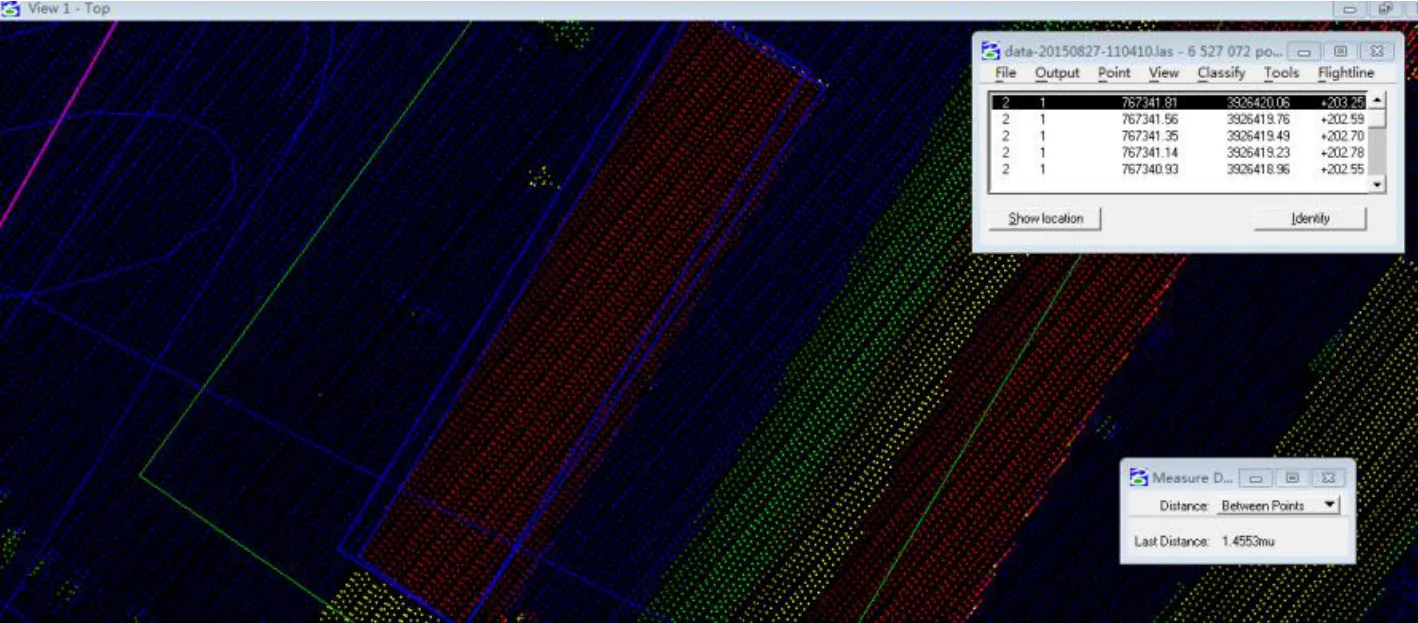
图7 航向角检校前Fig.7 Before heading angle calibration
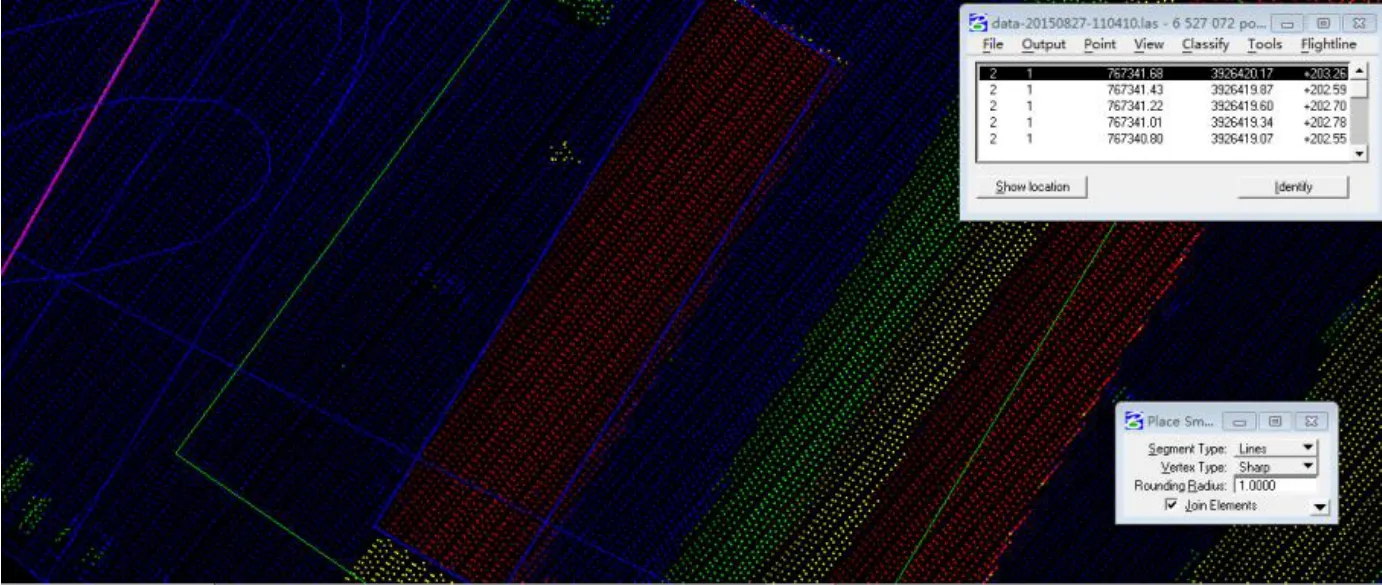
图8 航向角检校后Fig.8 After heading angle calibration
3.4 结果分析
(1)安置角检校结果
检校场由于范围选取范围较小,主要是为测区的检校服务,采用运-5飞机一个架次历时40分钟完成数据采集。最终经过检校得出检校场三个安置角为:roll为 179.625°;pitch为 0.0122°;heading为-0.015°。测区共计16条航线,设计行高2000 m,每个架次历时五小时,共两个架次。将检校场安置角改正值应用到测区后基本吻合,只有侧滚角出现了一些微小的调整,最后调整为179.6136°。从本次飞行数据不难看出侧滚角的数值最大达到了0.3864°,对点云数据的影响最大,这也是侧滚角需要最先进行检校的原因,也是最为关键的一个过程,后面的检校都是建立在在侧滚角改正后的基础。
(2)精度评定
本次安置角检校采用的是在航检校的方法,在检校场测区内选取了两条主路,并在路中心和大型房屋脚点及楼顶等位置共实地采集了200个点的坐标,经过比较分析得出高程精度可达厘米级,充分显示出SW-LiDAR在高程模型领域的优势。而平面精度评定时往往受到地物点等噪声点的干扰,精度评定的结果较差,有的能达到厘米级,有的却有分米级,总体来说不如高程精度。高程精度报告如图9所示。

图9 高程精度报告Fig.9 Elevation accuracy Report
4 结束语
SW-LiDAR系统在近年来的发展已经日趋成熟,系统集成方面可以满足高精度轻小型,硬件和一些辅助软件也通过项目在不断创新和改革技术。同时,实际作业时空域是航摄飞行的重大限制,飞行前需要协调测区所在军方和民航局,特别是飞行高度在3000m以上的大型飞行器,空域的协调十分困难。通过本次检校分析,利用特征地物来进行安置角检校是可行,该方法提高了作业效率,减少了人力、物力的投入,是一种可行的检校方法。同时也期待新的精度更高更简便的检校方法。
[1] 刘田龙, 谢劭峰, 常虹. 国产SW-LiDAR系统集成误差检校方法研究[J]. 地理信息世界, 2015, (01): 82-85.
[2] 朱凌妮, 高春清, 王然, 等. 谐振泵浦1645 nm Er: YAG激光器的实验研究[J]. 新型工业化, 2011, (12): 104-107.
[3] 郭馨. 外差探测激光雷达光学收发器优化设计[J]. 新型工业化, 2013, 3(1): 6-14.
[4] 苏丽萍, 赵卫疆, 任德明. 探测尾流轮廓的简易激光雷达的噪声分析[J]. 新型工业化, 2011, 1(5): 85-79.
[5] 王皓, 韩西萌, 余永林. 集成于SG-DBR激光器模块中的SOA的热效应研究[J]. 新型工业化, 2013, 3(11): 42-48.
[6] 刘磊. 机载LIDAR系统误差分析与检校方法研究[D]. 山东科技大学, 2011.
[7] 王菲, 焦正超, 王晓华. LD端面泵浦激光器泵浦聚焦光斑最佳纵向位置的研究[J]. 新型工业化, 2013, 3(12): 44-48.
[8] 左建章, 关艳玲, 李军杰. 高精度轻小型航空遥感系统集成与实现[D]. 北京: 测绘出版社, 2014. 8.
[9] 曲文文. 点云控制点提取关键问题研究[D]. 厦门大学,2015.
[10] 成枢, 胡合欢. 机载激光雷达测量系统集成误差检较[J].测绘与空间地理信息, 2013, (11): 6-8.
[11] 李志杰, 施昆, 关艳玲, 蒋凤保. 国产SW-LiDAR系统的简介[J]. 价值工程, 2013, (32): 39-40.
[12] 朱会平. 机载激光雷达测量系统检校与精度评价[D]. 河南理工大学, 2011.
[13] 张艳亭. 机载LIDAR系统集成误差检校和精度评定[D].山东科技大学, 2012.
[14] 张小红. 机载激光雷达测量技术理论与方法[D]. 武汉: 武汉大学出版社, 2012.
[15] 胡国军, 朱精果, 刘汝卿. Mars-LiDAR系统误差分析及安置角误差飞行检校[J]. 红外与激光工程, 2016, (12):342-330.
猜你喜欢
小哥白尼(神奇星球)(2021年12期)2021-03-08 09:22:56
测绘通报(2019年4期)2019-05-10 08:16:20
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
中等数学(2017年2期)2017-06-01 12:21:50
传媒评论(2017年2期)2017-06-01 12:10:16
传媒评论(2017年2期)2017-06-01 12:10:16
测绘科学与工程(2017年5期)2017-05-07 06:30:45
太空探索(2016年5期)2016-07-12 15:17:58
太空探索(2016年6期)2016-07-10 12:09:06