
基于PLC的小型无人船控制系统的研制
2018-03-23 01:09张少明梁家铨蒋祖星
舰船电子工程 2018年2期
张少明 崔 浩 梁家铨 蒋祖星
(1.广东交通职业技术学院 广州 510800)(2.广东省船舶自动化工程技术研究中心 广州 510800)
1 引言
运载工具的智能驾驶技术作为一个新兴的技术得到了社会的广泛关注,相对于蓬勃发展的无人机技术,无人船技术则严重滞后。我国有着丰富的海岸线与海河水域,无人船技术及其产品具有广阔的市场前景,目前仅极少数企业在进行针对水质监测和水底测绘方面的无人船产品研制。随着国家海洋战略和海洋防污染方面的国际公约和强制法规的实施,无人船在海面污染状况监测与清污作业、水面远程医疗服务、特殊海洋环境作业等领域将具有不可估量的社会经济价值[1]。
本文运用PLC技术设计和制作了小型无人船舶及其智能控制系统,并通过航行试验验证了技术可行性。通过加装智能传感器、无线透传、GPS定位和视频监控等功能模块及大数据分析处理技术,可实现船岸信息通讯、无人船智能控制、自动巡航运算,海面污染状况监测、海上急救物资输送、海洋特殊环境作业等功能[2]。
2 方案设计
2.1 目标
实现智能航行,智能航行系指利用计算机技术、控制技术等对感知和获得的信息进行分析和处理,对船舶航路和航速进行设计和优化;航行时,借助岸基支持中心,船舶能在开阔水域、狭窄水道、复杂环境条件下自动避碰,实现自主航行[3]。
实现一对多的上位机控制方式,若采用无线透传的近距离遥控模式,采用信道管理方式,通过不同频率的通道管理各无人船,最多可达64艘船舶,如图1所示。
2.2 功能与硬件
主要功能:以PLC控制为核心,操控调节二台直流吊艇电机转速进行无人船航速与航向操控,实现基本水面温度、水深等一般水文测量,完成活动水面油污抽取检测装置设计,即15ppm海面油污信号采集[4];通过PLC的RS485端口连接的433MHz~480MHz无线透传传输模块[5]作为主要通信模式组合4G网络模块相结合的遥控技术并配置BaiduGIS定位模块;力控组态完成上位机人机界面与后台数据库管理,运用其策略组运算进行自主航行计算;实现上位机监控与自主航行功能的小型无人船舶。
方案省去了检测船舶航向的罗经设备和控制船舶航向的操舵设备,采用双艇外直流电机提供动力,并通过调节双电机转速操纵船舶转向控制。订制长度1.4m船模,具备防水防撞防磨损装置,船体带有警灯、警报器等警示、视频监控装置及避障系统,采用闭孔泡沫填充、全封闭防水和上下隔舱等防沉设计,拥有一定船舱空间,12V直流有刷吊艇电机,1800转/min,额定电流20A,12V锂电池2组供电,满足一定的续航能力。
3 PLC端口与程序
选用可编程控制器定制国产PLC:ZK2N-32MR-11AD-2DA,32路开关量输入/出端口,11路A/D输入端口可接标准(0~10V)电信号传感器,2路D/A端口控制2台直流电机,另外4路100KHz高速输入端口X0~X3可作为脉冲式传感器使用,预留一定的扩展端口。根据PLC各端口的类型与功能,合理分配其输入输出端口。其中RS485端口接无线传输模块,编程口为RS232,编程方式参考三菱,PLC端口与寄存器使用分配如表1和表2。
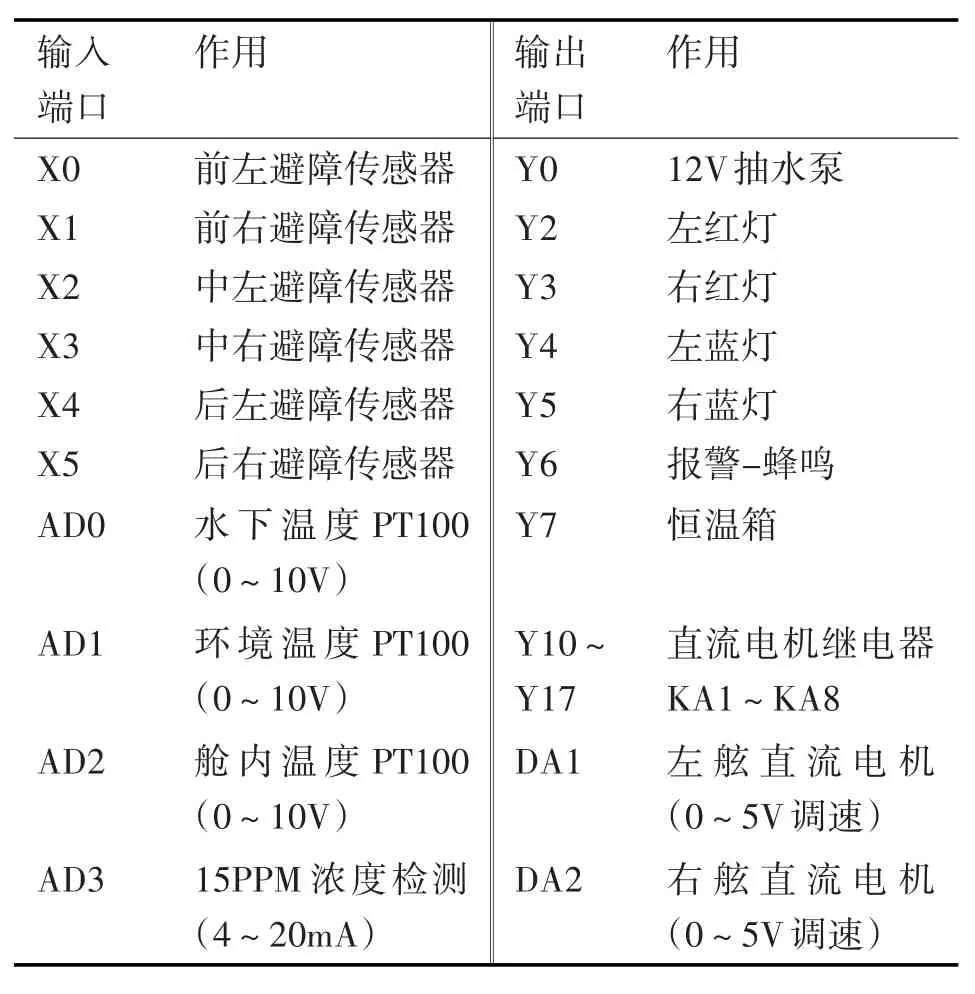
表1 PLC输入/输出端口分布表

表2 PLC寄存器引用参数表(部分)
PLC内部使用D20与D21寄存器作为电机调速输出,其范围值为16位二进制数(0~4095)对应0~10V的D/A输出,而电机调整模块仅为0~5V调速范围控制,运算取值范围0~2000。
RS485串口通讯参数在D8120设置,PLC运行后生效(stop时D8120复位为0),MODBUS-RTU从站站号在D8121设置(范围:1~255);设0号无人船为主站,其余为从站,从站数据先送至主站PLC寄存器,再由上位机读取[6]。
D20与D21寄存器数据读取程序以及主站D120读写1号从站D20寄存器程序如下:
Ldm8000
Wr3a K0D0D20 &&把16位D20写出至K0通道直流电机调速器,D0是为下限数;
Wr3a K1D0D21 &&DA输出通道K1,三菱FX1N仅为8位二进制数据,此为16位。
FROM H301D10D110 K1 &&将1号从站寄存器温度参数D10数据读至0号主站D110,H301读寄存器指令,从机地址1;
TO H601 D20 D120 K1&&将0号主站D120数据写到1号从站寄存器D20,H601写寄存器指令,从机地址1,控制1号船舶左舷转速参数;
……
上位机组态只需要改变数据库组态数据,即可读取或改变主站D20、D21、以及D110、120等寄存器数据,实现远程操控。
4 软件设计
4.1 人机界面软件
上位机选用力控Forcecontrol6.1,力控组态软件基本的运行环境分为三个部分,包括HMI(VIEW)人机界面、数据库DB、通讯程序IO/SERV⁃ER。借助其强大的HMI(VIEW)人机界面功能完成无人船监控界面的绘制;通讯程序IO/SERVER完成无人船与上位机的数据通信传输;并通过数据库DB将完成通信数据记录与管理,随时调用测试和分析,人机界面如图2所示。
所设计的实时数据库系统由管理器和运行系统组成,实时数据库运行系统可以完成对生产实时数据的各种操作:如实时数据处理、历史数据存储、统计数据处理、报警处理、数据服务请求处理等。管理器是管理实时数据库的开发环境(DbMan⁃ager),通过DbManager可以生成实时数据库的基础组态数据,来供运行系统调用[7]。如表3所示。
4.2 控制程序
上位机程序控制流程[8]如图3所示。
4.3 自主航行算法
采用简单的PID位置算法,实现定点自主航行,如图4所示,定出终点坐标B,可得航线AB函数;根据GPS每秒反馈回的坐标位置坐标(X1,Y1),计算出产生偏航角θ=arctan与偏航距离e=得控制离散公式:

表3 数据库组态
如果采样周期足够小,则U(n)的近似计算可以获得足够精确的结果,离散控制过程与连续过程十分接近,具体的PID参数必须由具体对象通过实验确定[9]。计算过程在上位机组态策略控制中进行,控制输出值为PLC中左舷电机D20与右舷电机D21。
当U(n)=0;D20∝U(n),D20=D21赋值,保持航向与航速前进,可手动调速;当U(n)>0;D20∝U(n),D21=-D20右转向;反之则反。
为提高自助巡航能力,可在原有基础上结合车载导航系统使用的Dijkstra算法和A*算法,并对传统的规划算法进行改进,即最优路径搜索算法[10],结合了无人船自有的避碰传感器进行避碰操作控制,可实现更加复杂的自助巡航设计。
5 实船与自动航行测试
实船具有在开阔水域自主航行的能力,船舶设有开阔水域自动避碰系统,可按预定的航路实现自动避碰,并进行自主航行,符合III计算机系统的要求。下水巡航可达4h(2m/s下),高速2h(4m/s下),无线透传模块测试正常如图5所示。
自主航行算法处理中,Kp=0.6Ku、Ti=0.5Tu、Td=0.12Tu值取经验法值,U(n)、D20、D21值变化较快,导致电机转速变化过快,船舶操控性变差,实际取值操作中将GPS采样降为2s采样一次,基本能完成定点导航功能[12]。不同船型大小、电机功率及定位传感器信号精度等均影响控制效果,取值参考意义不大。
6 结语
设计无人船能将无人船的数据信息发送回上位机控制基站,可实现手动控纵与基本自助航行能力,完成水质采样、定位、姿态、无人船工作状态等航行控制及其他野外作业任务,各类数据信息的采集与传输正常,操控功能的实现性、数据采集的快速性和准确性、系统运行的可靠性等均能实现目标要求。进一步研究的问题是提高自助巡航精度与准确性,因选用精度普通的定位器,导致单坐标定位误差较大,需不停计算船位,会出现短暂停止,耗时较长甚至跑偏等问题出现,可以通过提高测量精度或加装罗经航向测量等传感器加以研究改善。
[1]严新平.智能船舶的研究现状与发展趋势[J].交通与港航,2016,7(1):25-28.
[2]龚瑞良,吉雨冠.智能船舶技术和无人驾驶技术研究[J].船舶,2016(05):82-87.
[3]中国船级社,智能船舶规范2015[S],2016:4-7.
[4]张少明,崔浩,区锦品等.一种遥控海面油污浓度监测装置.中国,ZL201610304378.X[P].2016.
[5]张少明,区锦品,王海松等.一种用于无人船的无线遥控系统及具有其的无人船:中国,ZL201520365602.7[P].2017.
[6]张少明,张禧博,黄梓康.MODBUS在工控PLC的应用[J].机电工程技术,2016,45(04):43-45.
[7]龚运新,顾群,陈华.工业组态软件应用技术(第2版)[M].北京:清华大学出版社,2013,09:60-68;
[8]黄国良,徐恒,熊波等.内河无人航道测量船系统设计[J].水运工程,2016,511(1):162-168.
[9]胡江强.基于遗传优化的船舶航向混合智能控制[D].大连:大连海事大学,2003.
[10]滕文.车载导航系统最优路径搜索算法研究[J].自动化与仪器仪表,2016,206(12):179-180.
[11]吴青,王乐,柳晨光等.基于MPC的无人船运动控制及可视化仿真系统实现[J].武汉理工大学学报(交通科学与工程版),2016,40(2):245-250.
[12]王三军.GPS导航电子地图的应用研究[D].上海:同济大学,2007.
猜你喜欢
科学与财富(2022年6期)2022-07-04
齐齐哈尔大学学报(自然科学版)(2022年4期)2022-06-15
计算机应用(2020年5期)2020-06-07
智族GQ(2019年9期)2019-10-28
汽车工程师(2019年7期)2019-08-12
车迷(2018年12期)2018-07-26
电脑知识与技术(2018年8期)2018-05-07
电子技术与软件工程(2018年1期)2018-03-22
青年时代(2017年7期)2017-03-28
现代电子技术(2009年6期)2009-05-31
