全内腔Nd:YVO4微片激光器稳频研究
2018-03-21 05:48马志强
机械设计与制造 2018年3期
邓 勇,马志强,江 奕,蔡 婷
(南通大学 机械工程学院,江苏 南通 226019)
1 引言
半导体激光器(Laser Diode,LD)泵浦的掺钕钒酸钇(Nd:YVO4)微片激光器结构简单紧凑,与半导体激光器相比,前者具有激光线宽窄、光束质量好、相干长度长等优点,因此在位移测量领域有着良好的应用前景[1-2]。将Nd:YVO4激光器作为光源的干涉仪,对被测物进行测量时,测量结果最终将溯源到光源的波长上,故而系统的测量精度将取决于光源波长的准确性和稳定程度[3]。激光器的波长又取决于频率,要想提高系统的测量精度,实现纳米分辨率,稳频是必不可少的环节。全内腔Nd:YVO4微片激光器,由于使用的晶体尺寸较小,常用的稳频方法因其较短的腔长而无法采用,需重新研究新的方案。F-P腔稳频、兰姆凹陷稳频、塞曼稳频、PDH稳频、自然介质的线性吸收稳频以及饱和吸收稳频[4]都是现在广泛使用的稳频方法,但都不适用于全内腔微片激光器。实验发现微片的温度变化是影响全内腔微片激光器频率变化的决定性因素,着手于晶体的温度控制方面,分析了温度对频率的影响,设计了温控稳频结构,并分析了其他影响频率温度的因素。
2 系统结构
LD向微片发射的功率是激光器所产生热效应的主要来源。端面泵浦的激光器有着自己独特的温度分布、热透镜效应以及应力分布[5]。作为增益介质的固体微片Nd:YVO4晶体的折射率、体积、形状会都随着温度和应力发生变化而变化。这些都会造成Nd:YVO4激光器的频率变化。系统要尽可能避免产生多余的热量,实验中采用尽量窄的LD发光频率从而提高增益介质的吸收效率。泵浦过程中产生的热量是无法避免的,周围环境的温度变化也会影响微片温度。作为晶体固有性质的折射率与尺寸是无法改变的,故而控制微片的温度,保持微片的温度稳定就成了稳频的关键。针对上述原因,设计了系统的机械结构。系统结构,如图1所示。该系统主要使用的是 Nd:YVO4微片,其尺寸为(3×3×0.7)mm,所使用的LD为海特光电的808nm大功率半导体激光器,其输出功率为500mW,使用直流稳压源进行供电。LD和微片都固定在铜块中,并将铜块作为热沉使用;铜块前后两端装有TEC,即半导体致冷器(Thermoelectric-Cooler,TEC)对微片进行加热和制冷;铜块外面包裹有由聚四氟乙烯板加工而成的保温层,保温层外面则是铝块制成的热沉,增加与外界的接触面积。LD出线端装有温度探测器PT100,对光源的温度进行探测并输入到采集卡中进行后续控温处理。温度测量时,需要实时检测微片中心附近温度场变化,将传感器紧靠微片端面,传感器信号实时输入后续控制电路,调节TEC电流,控制TEC的制热或制冷,使腔内热量保持平衡。

图1 温控系统机械结构示意图Fig.1 Mechanical Structure Diagram of Temperature Control System
3 稳频方法
3.1 稳频方案设计
稳频方案,如图2所示。可分为三个部分:由LD泵浦的Nd:YVO4微片激光器所构成的光源,数字PID补偿控制系统和TEC的驱动控制系统。系统工作时PT100实时监测微片的温度,温度信号经过放大处理后送入采集卡,采集到计算机里,由PID温度补差系统计算输出控制信号,控制TEC进行加热或制冷工作,使系统温度保持在预设温度处。激光振荡频率主要由谐振腔的谐振频率决定,即:

式中:ν—谐振频率;c—光速;n—腔内的折射率;q—纵模序数。
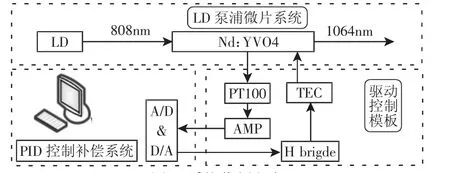
图2 系统稳频方案Fig.2 Frequency Stabilization Plan
从上式中可以看出,若腔长或者腔内的折射率n发生变化,则激光器的振荡频率也将随之改变。

式中:Δv—频率的变化量;ΔL—腔长的变化量;Δn—折射率的变化量。
故频率的稳定问题,可以归结为如何设法保持腔长和折射率稳定的问题。而环境温度的起伏或者激光器工作时发热,都会使腔材料随着温度的改变而伸缩,以致引起频率的漂移。

式中:ΔT—温度变化量;α—谐振腔间隔材料的线膨胀系数。
实验用的Nd:YVO4晶体,工作过程中折射率基本不变,激光器频率变化主要受温度影响,其热膨胀系数为α=4.43×10-6/K,温度变化一度,频率漂移将达几GHz,稳频对于系统是必不可少的一环,为使频率稳定度达到(10-7~10-8),用以下硬件来实现温度的稳定。
3.2 稳频执行元件—TEC
TEC是温控系统的执行元件,是利用半导体材料的珀尔帖效应制成的。当直流电流通过两种半导体材料组成的电偶时,会出现一端吸热,一端放热的现象,这种现象称为珀尔帖效应。当有电流从TEC流过时,电流产生的热量会从TEC的一侧传到另一侧,在TEC上产生热侧和冷侧,这就是TEC的加热与致冷原理[6]。TEC的应用途径非常广泛,激光器的温控和PCR的温控是最典型的应用。众所周知,激光器对于温度非常敏感,在该系统中尤其如此,因而对TEC的要求较高。根据系统结构和稳频目标,实验中所采用的是型号为TES1-3104的TEC,极限工作电流为4.0A,极限工作电压为3.8V,最大温差66℃,其最大制冷功率为8.1W,能够满足系统的需求。
3.3 MAX1978
作为实验系统的核心部分的控制器和执行器,其主要作用是驱动TEC,在温度信号的参考下,精准控制TEC的制热或制冷。MAX1978是用于TEC模块的最小、最安全且最精确的完全单片温度控制器。其工作电路,如图3所示。片内的超低飘移的斩波型放大器芯片使得温度稳定性能够维持在(±0.001)°C。MAX1978工作于单电源,TEC连接在两个同步buck稳压器之间,提供电流为(±3)A的双极性输出。双极性工作实现了无死区的温度控制,避免了轻载电流时的非线性问题[7]。MAX1978的主要工作由片内放大器实现,预设的温度值和实时温度值所对应的电压值分别输入第一个斩波自稳零仪表放大器两端。模拟PID控制电路置于第一个放大器的输出端和第二个积分放大器的反相输入端之间。电路一端接内部参考电压,输出端的电压用来控制TEC电流的大小与方向。输出电压与参考电压进行做差比较,两者差值用来控制TEC的电流方向,即控制TEC制热或制冷。温度传感器实时监测着TEC的温度,输出电压值构成温度控制回路[8]。根据MAX1978工作原理,设计了芯片的电路接线图,如图4所示。
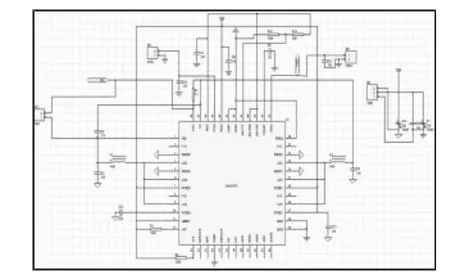
图3 MAX1978典型工作电路Fig.3 Typical Circuit of MAX1978
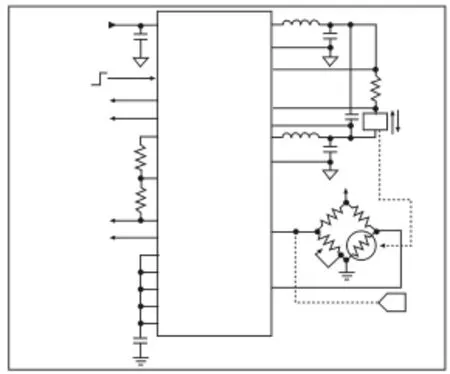
图4 MAX1978电路接线图Fig.4 Circuit Wiring Diagram for MAX1978
3.4 PID系统补偿电路
为了实现最终的稳频目的,需要对温度进行准确控制。模拟比例积分微分(PID)控制器的温度控制是一种相当简单有效的控制电路,确保系统能够对TEC进行准确控制,从而对温度进行有效的调节[9]。比例积分项协同工作,精确地伺服TEC的电流,以保持系统对温度的预设值。与此同时,微分项负责对完成上述工作的速率进行调节,优化总体系统响应速度。实验时通过手动调节PID参数,观测实验结果,以达到最好的控温效果。首先设定目标温度,将PID参数设为零,此时TEC输出为0,即不制冷也不加热。然后从0开始调节比例P,每次增加时等待30s至几分钟,观察当前温度和目标温度的差异;直至得到一个P值,能使当前温度尽可能的接近目标温度并且不产生振荡,温度差在±0.01°间为宜。继而调节积分参数I,积分的作用是清除误差。I值太少则误差消除慢,温度稳定时间加长;I值太大,则易产生温度振荡,温度不容易稳定。最后调节参数D,即快速响应的温度控制。一般不使用参数D,这里D设为0,如果温度变化比较频繁,可适当设置加大D的值,以得到温控目的。最终参数设置为Kp=2,Ki=0.08,Kd=0。实验中同时也可以对PID补偿监控系统进行数学建模以使用数学方法调整系统参数来实现控温目的。斩波放大器、H桥、PWM调节、计算机和数字采集卡构成了整个系统。其中,50倍的斩波放大器、PWM调节和H桥可看作已知的比例环节,剩下的未知环节则需要由实验来测定。通过测量系统的开环幅频特性曲线,计算得到最终的传递函数。
4 实验结果
激光器的输出频率、晶体温度与输出功率这三者相互影响,相互作用。温度变化一直都是影响频率最主要的因素,温度减小会使频率增加。输出频率在增益带宽内移动时又会使输出功率发生变化,激光器腔内功率同步输出功率的变化,对功率变化做出反应,最终又会改变温度和频率[10]。Nd:YVO4激光器用做测量时,将使用波长作为尺子,所以测量结果将最终溯源到波长上。故而系统对频率稳定度的要求较高。波长与频率的关系为

式中:λ—波长;c—光速;ν—频率。
回馈干涉仪在测量位移时,位移计算式为:

式中:ΔL—位移;λ—波长;Δφ—相位变化量。
将式(5)在v0处做泰勒级数展开代入式(6)得
其中,物体移动距离ΔL=50mm,测量误差ε=10nm,激光器波长 λ0=1064nm 时,则波长变化量为 Δλ=1.064×10-13,计算得到频率稳定度应在10-7内。
实验分别对激光器的频率和输出功率进行了测量,并对他们做了定性分析。实验在室温26℃的环境下测量了微片激光器的频率漂移情况和激光器的功率漂移情况,在10h内频率漂移在200MHz内,4h的功率变化为0.3mW,如图5所示。
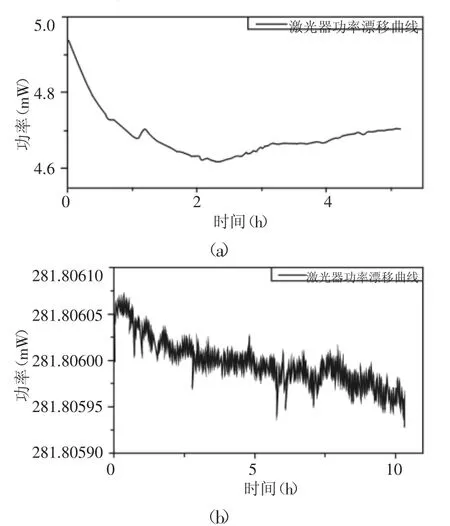
图5 频率和功率测量曲线Fig.5 Measuring Curve of Frequency and Power
晶体温度的变化后,会导致其尺寸发生微小形变,从而致使腔长变化,腔长发生变化后频率会同步变化,最终导致温度的变化和频率的变化相反。频率曲线和功率曲线整体上变化趋势呈反相,表明谐振腔内的频率在激光器增益曲线中心频率的右侧,频率减小时功率增大,反之则功率减小。在增益曲线范围内激光频率发生移动时,输出功率也会随之改变。从图中可看出输出功率并不同步频率变化。频率在50 min左右开始减小时输出功率依然有约90 min的下级趋势,此时输出功率约下降了0.2mW。由公式(8)可得腔内激光功率约变化了5mW:Pi1064=49×Po1064(8)式中:Pi1064—激光器的输入功率;Po1064—激光器的输出功率。
此时腔内会发热,其热量来源与变化的功率,发热致使晶体温度上升腔长变长而频率进一步减小。功率变化5mW对应频率几百兆赫的变化量级。多次试验后,计算得到频率10h内的变化量在 100MHz之内,稳频精度为 4.5×10-7,重复性不超过 110MHz。不考虑外界干扰的情况下,1min时间频率变化约4MHz,频率的稳定度可达到10-8量级,满足设计要求。
5 结论
对全内腔Nd:YVO4微片激光器的稳频进行了研究,提出了有效的温控方式。介绍了系统的各个环节的设计过程和PID环节传递函数的计算。全内腔微片Nd:YVO4激光器在未稳频的环境下,会有几GHz的频率漂移,使得回馈干涉仪的测量误差达到μm量级。温控稳频后的全内腔Nd:YVO4激光器频率稳定度能达到(10-7~10-8),测量误差在100nm内,达到了设计要求。稳频后的回馈干涉仪不仅显著减小了测量误差,也明显提高了仪器的工作性能,对于后续的仪器研究与应用具有重要推动作用。
[1]陈艳,赵洋.LD 泵浦 Nd:YAG 微片激光器[J].光学技术,1997(2):4-7.(Chen Yan,Zhao Yang.LD-Pumped Nd:YAG microchip lasers[J].Optical Technology,1997(2):4-2.)
[2]陈光霞,卢尧军,曾晓雁.Nd:YAG激光器金属零件激光快速成型工艺研究[J].机械设计与制造,2007(05):132-134.(Chen Guang-xia,Lu Yao-jun,Zemg Xiao-yan.Technics study on laser rapid prototypinq for metal part with Nd:YAG laser[J].Machinery Design&Manufacture,2007(5):132-134.)
[3]张亦男,谈宜东,张书练.用于全内腔微片激光器稳频的温度控制系统[J].红外与激光工程,2012(1):101-106.(Zhang Yi-nan,Tan Yi-dong,Zhang Shu-lian.Temperature control system for frequency stabilization of total Internal cavity microchip laser[J].Infrared and Laser Engineering,2012(1):101-106)
[4]王丽霞,蒋燕义,毕志毅.基于纵模拍频控制的激光稳频技术[J].中国激光,2007(9):1198-1202.(Wang Li-xia,Jiang Yan-yi,Bi Zhi-yi.Laser frequency stabilization based on control of intermode beat note[J].Chinese Journal of Lasers,2007(9):1198-1202.)
[5]杨永明.LD端面泵浦固体激光器中晶体的热效应研究[D].西安:西安电子科技大学,2007.(Yang Yong-ming.The research on thermal effect of the crystal in LD pumped solid-state laser[D].Xi’an:Xidian University,2007.)
[6]钟跃明.光回波损耗测试仪设计与研究[D].合肥:合肥工业大学,2007.(Zhong Yue-ming.The research and design of optical return loss meter[D].Hefei:Hefei University of Technology,2007.)
[7]曹锋.超低剩余反射计的研究与设计[D].武汉:华中科技大学,2006.(Cao Feng.Research and design of ultra-low residual reflectometer[D].Wuhan:Huazhong University of Science and Technology,2006)
[8]刘繁明,赵亚凤.一种新型的基于TEC的精密温控器设计[J].中国惯性技术学报,2004(6):63-66.(Liu Fan-ming,Zhao Ya-feng.Design of a new tec-based accurate incubator[J].Journal of Chinese Inertial Technology,2004(6):63-66.)
[9]欧艳华.基于神经网络的自适应PID控制器设计[J].机械设计与制造,2014(6):263-265.(Ou Yan-hua.The design of adaptive PID controller based on neural network[J].Machinery Design&Manufacture,2014(6):263-265.)
[10]刘宁,邓勇,曹红蓓.Nd:YAG 激光回馈干涉仪稳频研究[J].激光与红外,2014(5):506-510.(Liu Ning,Deng Yong,Cao Hong-bei.Research on frequency stabilization of Nd:YAG laser feedback interferometer[J].Laser&Infrared,2014(5):506-510.)
猜你喜欢
理化检验(物理分册)(2021年3期)2021-03-23
装备制造技术(2020年12期)2020-05-22
河北省科学院学报(2020年4期)2020-03-19
原子与分子物理学报(2020年5期)2020-03-17
科学(2020年6期)2020-02-06
汽车维护与修理(2019年14期)2019-08-08
橡塑技术与装备(2018年17期)2018-09-01
电子制作(2018年9期)2018-08-04
铜仁学院学报(2018年6期)2018-07-05
通信电源技术(2016年4期)2016-04-04