FMCW雷达水位计设计
2018-03-21 05:48逯继业武利生赵达森
机械设计与制造 2018年3期
逯继业,武利生,赵达森
(太原理工大学 机械工程学院,山西 太原 030024)
1 引言
水位测量是水文防测工作中的重要内容,与传统接触式测量及超声波测量相比,利用雷达水位计测量水位具有测量精度高、维护方便等优点,目前国内部分水文站已引进国外生产的脉冲型雷达水位计,脉冲型雷达水位计价格昂贵均在十万以上,而FMCW雷达水位计仍处于研究阶段[1]。设计了一款FMCW雷达水位计,并搭建实验平台进行了实验测量,测量结果满足水位计的实时测量及精度要求。
2 雷达传感器工作原理
FMCW雷达传感器大同小异,调制信号控制压控振荡器(VCO)产生调频信号,调频信号作用于发射天线发射调频雷达波,雷达波传递至测量目标后反射形成雷达回波,雷达回波由雷达传感器接收天线接收,雷达回波与发射波经过混频器产生混频信号,混频信号经过滤波放大后输出差频信号。
设计采用锯齿波调制信号,差频信号频率与测量距离成正比,测量差频信号频率可间接测量距离,测量距离可表示为[2]:

式中:R—测量距离;c0—光速;B—调频带宽;T—调制信号周期;fd—差频信号频率。
选用德国Innosent的IVS-179雷达传感器,工作电压为5V,调制电压范围为(0~10)V,调制斜率为50MHz/V,发射频率为(24~24.250)GHz,IVS-179 采用收发天线分离结构,方向样式为 7×28°。
3 水位计硬件组成及工作过程
水位计硬件由雷达传感器、DSP核心电路、供电模块、波形发生器、信号处理模块、温度模块及串口通讯模块几部分组成,水位计硬件组成,如图1所示。其中虚线箭头为供电走向,实线箭头为信号/数据走向。工作过程结合图1简要描述为:DSP通过控制波形发生器向雷达传感器发送调制信号,调制信号作用于雷达传感器,雷达传感器发波、收波、混频及滤波放大处理后输出差频信号,差频信号经过信号处理后进行模拟数字采样,使用鉴频算法计算差频频率并换算成距离,距离数据经过矫正后,通过串口通讯模块上传至上位机显示并存储。

图1 水位计硬件组成Fig.1 Level Meter Hardware
3.1 DSP核心电路
DSP核心电路是DSP运行的基础电路,选择TMS320F28335作为DSP核心芯片[3],它是32位浮点DSP,主频工作在150MHz,具有串行外设接口(SPI)及串行通信接口(SCI),同时内部集成16通道12位精度的AD模块,内部存储具有34K的SRAM及256K的FLASH。DSP核心电路由DSP电源模块、时钟电路、复位电路及JTAG模块组成,另外为了满足数据存储及算法运行需求,扩展了256K的SRAM,存储空间映射到DSP的Zone6区域。
3.2 供电模块
供电模块一方面为DSP核心电路供电,另一方面为雷达传感器、波形发生器等供电,为了兼容工业12/24V直流电源,设计了两级分离电压转换电路。第一级使用TPS5410芯片将输入(10~30)V直流电源转换为约9V电压,最大电流为1A;第二级使用两个线性调压芯片LM1117-5.0得到两路5V电压,最大电流为800mA。
3.3 波形发生器
波形发生器为雷达传感器提供调制信号以发射调频雷达波,设计波形发生器的输出电压范围为(0~5)V,选择DAC8831作为波形发生器的主要元件,DAC8831是16位高精度的单通道模数转换器,具有低功耗、低噪声、高线性度的优点,最快建立时间为1us,DAC8831具有最快可达50MHz的SPI,从而方便与DSP通讯。波形发生器硬件电路,如图2所示。在DAC8831输出端增加缓冲放大器以匹配雷达传感器输入阻抗,从而增强抗干扰能力、减小信号失真。
设计中选择100Hz锯齿波作为调制信号,锯齿波波形由函数生成经过调频线性矫正[4]后保存至DSP内部FLASH中,DSP运行时将波形数组读取至RAM中,通过SPI将波形数据逐个发送至DAC8831,DAC8831接收数据使能后即可建立调制电压波形。
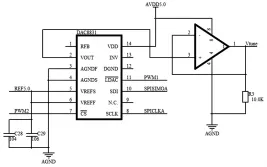
图2 波形发生器硬件电路Fig.2 Waveform Generator Hardware Circuit
3.4 信号处理模块
雷达传感器中压控振荡器(VCO)的非理想性[5]导致原始差频信号中伴有调制泄漏信号,调制泄漏信号严重影响了差频信号的后续处理及测量,而且随着距离的增加差频信号强度明显减弱,因此设计高通滤波可编程放大电路以解决调制信号泄漏及信号强度问题。
采用多路负反馈(MFB)结构设计高通滤波器[6],它具有良好的温度稳定特性及较低的输出阻抗的优点,鉴于采用100Hz的锯齿波作为调制信号,现设计转折频率为1kHz、放大倍数为1的高通滤波器。选用AD8532作为运算放大器,其采用单电源+5V供电,为了兼容后续信号放大及采集须在AD8532的正相输入端加入偏置电压,考虑到DSP内部AD模块量程为(0~3)V,偏置电压选择为1.5V。可编程放大电路选用可编程增益放大器(PGA)MCP6S21,MCP6S21最大放大倍数为31,DSP不断检测输入信号的幅值,根据信号阀值确定放大倍数,通过SPI控制MCP6S21从而使采集的信号尽量布满量程范围。如图3所示。偏置电压可采用电阻分压得到,并使用运算放大器隔离,分压电路与MFB滤波电路及可编程放大电路共同组成了有源滤波放大偏置电路。
距离约为5m的时采集到的原始差频信号、滤波后的信号及放大4倍后的信号,波形显示滤波效果良好,信号放大无明显失真,如图4所示。同时可以观察到,差频信号随调制信号周期变化且在周期过渡处不平稳,因此仅能采用单个周期的部分区间信号以计算差频信号频率。在MATLAB建立滤波器传递函数模型,根据阶跃响应曲线,以0.01的稳定度计算得到图3中设计的滤波器稳定时间为(0.96×10-3),约为调制周期的 1/10,因此初步确定调制周期后90%为有效信号区间。

图3 有源滤波放大偏置电路原理图Fig.3 Active Filter Amplifier Bias Circuit Principle Diagram

图4 滤波及放大效果Fig.4 Filtering and Amplification Effect
3.5 其他模块
考虑温度影响雷达传感器调制斜率及部分元器件的工作性能,需要在不同温度下对水位计的系统参数进行标定,实际测量时从FLASH中读取以矫正,选择电压输出型温度芯片TMP36,TMP36在25℃时输出电压为750mV,温度电压斜率为10mV/℃,温度误差在1℃以内,TMP36输出模拟电压供AD采集,换算后得到温度值。通讯模块将SCI的TTL转为串口,通过串口即可与其他串口设备连接,达到数据传输的目地,设计采用MAX3232芯片,仅需四个0.1μf电容即可实现最高速度为1Mbps的通讯功能。
4 水位计软件设计
4.1 软件工作流程
软件工作流程可分为主程序、定时器中断及通讯中断三部分,其工作流程分别,如图5、图6、图7所示。

图5 主程序流程图Fig.5 Main Program Flow Chart
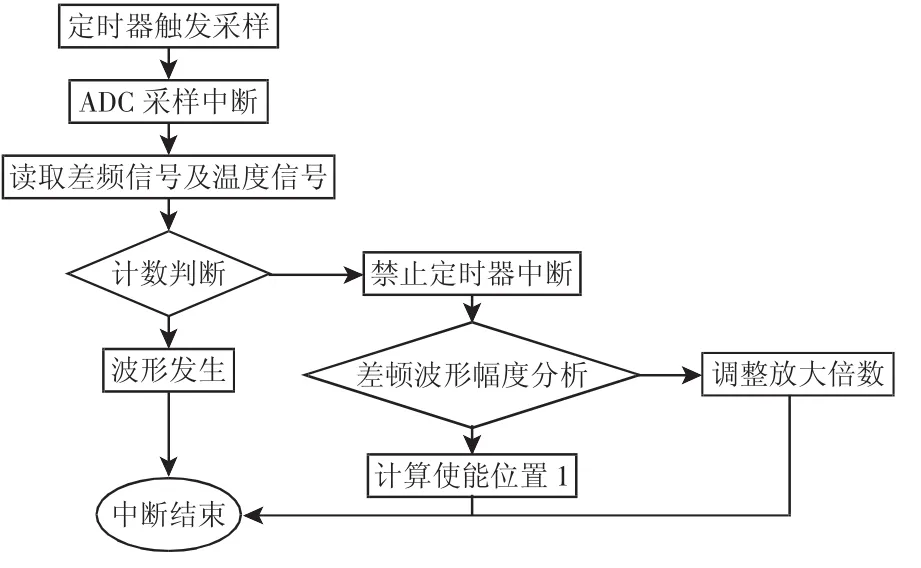
图6 定时器中断流程图Fig.6 The Flow Chart of The Timer Interrupt
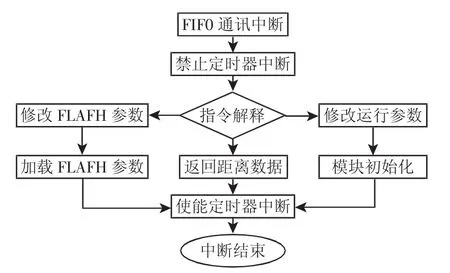
图7 通讯中断流程图Fig.7 Communication Interrupt Flow Chart
主程序主要实现代码移植、设置初始化、参数初始化及距离计算等功能。水位计设计时将运行代码固化于DSP内部FLASH中,运行时将代码移植至RAM中以提高运行速度[7];将调频线性矫正后的锯齿波形及温度矫正系数从FLASH中读取到RAM中,以便直接调用;将距离计算算法中重复计算的部分(算法因子)提前生成,从而节省计算量,算法因子包括窗函数数组及FFT蝶形因子等,基于此,设计时扩展了256K外部SRAM满足以上需求;定时器中断触发采样得到一定数量的信号时,计算使能位置1,完成一次距离计算并保存。
定时器中断实现数据采集及波形发生功能,采用定时器触发ADC采样的方式,采样完成后执行ADC采样中断程序,波形发生在ADC采样中断中执行具有时序稳定及方便有效区间提取的优点,另外SPI从机使能端采用不同的PWM口以实现波形发生与可编程放大器共用SPI,DSP分析采集信号的幅度从而确定可编程放大器的放大倍数。设置采样频率为120kHz,调制周期为100Hz,单个调制周期采样点数为1200点,则锯齿波波形点数设计为1200点,采样得到需要点数的数据后停止采样,将计算使能位置1,主程序进行距离计算。
通讯中断实现数据上传及参数修改功能。设计采用16位FIFO通讯模式,将上位机发送的指令根据自定义通讯格式进行解释,运行参数包括通讯参数、调制频率、采集点数等,修改运行参数需要对应模块重新初始化,FLASH参数包括锯齿波波形数据、温度矫正参数等,修改FLASH参数后需要加载新数据至RAM中,水位测量正常工作时,上位机发送读取距离指令,水位计返回距离数据。
4.2 距离计算实现
距离计算首先使用鉴频算法计算差频信号频率,然后根据式(1)计算出距离,再根据温度矫正参数修正测量距离。在水文测量中,水位计测量精度要求为1cm以下,直接使用快速傅立叶变换(FFT)远不能达到测量精度要求。
采用WIN_FFT_CZT算法提高差频频率估计分辨率,即是采用加窗(WINDOWING)、FFT与线性调频 Z变换(CZT)的结合算法,FFT用来初步估计差频信号的频率,再使用CZT细分FFT主频附近的频率从而提高差频信号的频率分辨率,加窗用于抑制FFT及CZT的频谱泄漏。其中,CZT算法可根据Bluestei等式分解、序列延长后通过线性卷积代替循环卷积的方法实现其快速算法[8]。
设置带宽B为250MHz,调制周期为100Hz,单个调制周期采样1200点提取1024点数据计算差频,窗函数选择为汉宁窗,FFT采用1024点,CZT细分采用1000倍,则理论距离分辨率为0.7mm,笔者采用C语言编写WIN_FFT_CZT[9]算法并对计算过程进行了优化,在TMS320F28335中单次运行时间约为58.5ms,则完成一次测流的时间为68.5ms,即每秒可完成14.6次测量,满足水位计实时测量要求。
5 实验室测量
5.1 水位计样机及实验平台
水位计样机及实验平台实物图,如图8所示。DSP核心板包含DSP核心电路,扩展板包含电源模块、波形发生器、信号处理模块等,水位计样机尺寸为(105×85×40)mm,使用 12V 直流供电,测量数据通过串口转USB设备上传至计算机保存及显示,丝杠装置可调整水位计样机与被测目标的距离,其距离调整精度可达0.025mm。

图8 实物图Fig.8 Real Figure
5.2 温度矫正系数测定
雷达传感器理想调谐斜率S为50MHz/V,调制电压Vtune设置为5V,则理论带宽B为250MHz,但实际中S及Vtune与设计值均有一定偏差,设计中将系统偏差量均归于温度矫正系数。实验中利用丝杠装置高精度距离调整的优点,采用线性拟合法标定系统参数,实现方法为:利用步进等距离测量的数据根据式(1)计算得到距离值,采用线性拟合确定其斜率K,将斜率K与步进距离值L作比值即可得到温度矫正因子Q。在温度为18.2°的室内进行测量实验,采集到步进距离为5mm的50组数据,采用最小二乘法进行线性拟合后计算出斜率K为5.9683×10-3,则温度矫正因子Q为1.1937,在温度为20.5℃时测量温度矫正因子为1.1949。
5.3 实验数据
对某一距离进行100次测量的数据,如图9(a)所示。结果显示距离跳动约为3mm。以某一距离作为起始测量,如图9(b)所示。步进5mm测量的50组实验数据(取100次测量的平均值),对图9(b)中测量数据进行线性拟合后的误差,如图9(c)所示。数据显示线性度较好,但存在一定程度误差,测量精度约为4mm。
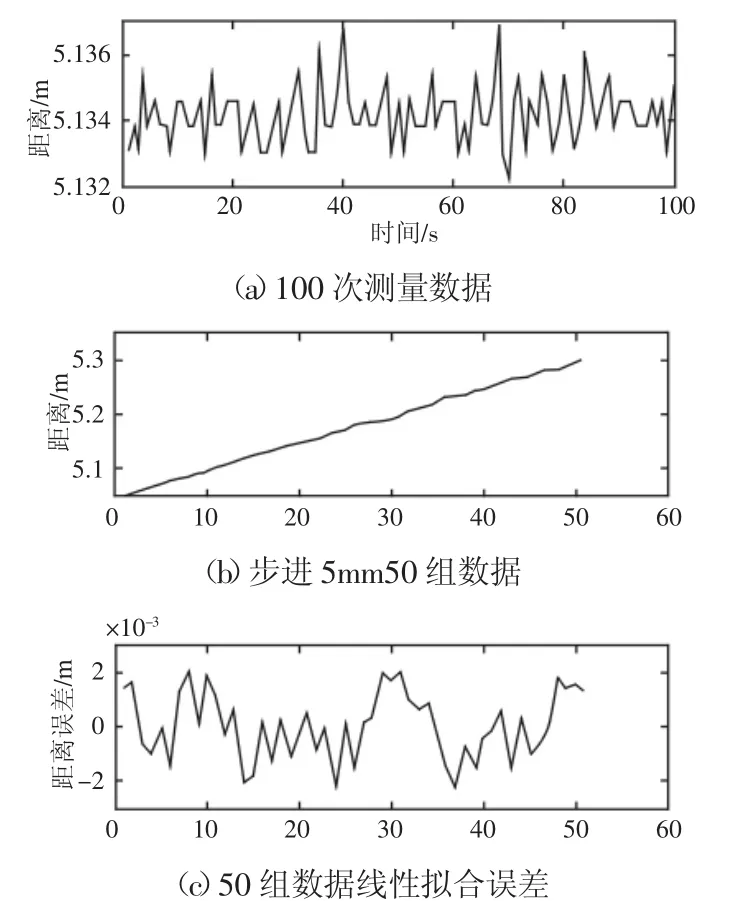
图9 实验数据Fig.9 Experimental Data
6 结束语
采用IVS-179雷达传感器、以TMS320F28335为核心设计了雷达水位计,水位计样机在实验室中单次测量时间约为68.5ms,测量精度约为4mm,满足对水位的实时测量及精度要求[10]。水位计样机尺寸较小、质量轻,当前正在设计水位计壳体以便安装至水文站进行测试,由于河水测量环境多变,水位计需根据实际情况不断改进完善。
[1]许笠,王延乐,华小军.雷达水位计在水情监测系统中的应用研究[J].人民长江,2014,45(2):74-77.(Xu Li,Wang Yan-le,Hua Xiao-jun.The application of radar level meter in hydrologic monitoring system[J].The People of the Yangtze River,2014(2):74-77.)
[2]梁宇强.FMCW雷达水位测量系统的设计[D].太原:太原理工大学,2014.(Liang Yu-qiang.The design of FMCW radar level measurement system[D].Taiyuan,Taiyuan University of Technology,2014.)
[3]张卿杰,徐友,左楠.手把手教你学 DSP-基于 TMS320F28335[M].北京:北京航空航天大学出版社,2015:26-30.(Zhang Qing-jie,Xu You,Zuo Nan.Teach You Learn DSP-holding Based on TMS320F28335[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2015:26-30.)
[4]王旭东,潘明海,蒋晓红.雷达目标模拟器LFM信号线性度校准研究[J].仪器仪表学报,2011,32(10):2388-2392.(Wang Xu-dong,Pan Ming-hai,Jiang Xiao-hong.The radar target simulator LFM signal linearity calibration study[J].Journal of Instruments and Meters,2011,32(10):2388-2392.)
[5]盛怀茂,李玉芳,夏冠群.FMCW毫米波雷达中频滤波器的研究[J].红外与毫米波学报,2001,20(6):472-476.(Cheng Huai-mao,Li Yu-fang,Xia Guan-qun.FMCW millimeter wave radar intermediate-frequency filter research[J].Journal of Infrared and Millimeter Wave,2001,20(6):472-476.)
[6](美)Carter B,Mancini R.运算放大器权威指南[M].姚剑清译.北京:人民邮电出版社,2010:276.(Carter B,Mancini R.Operational Amplifier Authoritative Guide[M].Yao Jian-qing Translation.Beijing:People’s Posts and Telecommunications Press,2010:276.)
[7]陈惠纲,黎驱.基于TMS320F28335的DSP/BIOS系统从FLASH到RAM运行[J].现代电子技术,2015,38(2):65-68.(Chen Hui-gang,Li Qu.The DSP/BIOS system based on TMS320F28335 from FLASH to RAM to run[J].Journal of Modern Electronic Technology,2015,20(2):65-68.)
[8]谷云高.一种基于Chirp Z变换的频谱细化实现方案与仿真[J].电视技术,2009,49(5):93-95.(Gu Yun-gao.A detailed implementation scheme based on Chirp Z transform spectrum and simulation[J].Journal of TV Technology,2009,49(5):93-95.)
[9]RABINER L R,SCHAFER R W,RADE C M.The chirp z Transform[J].IEEE Transactions on Audio and Electroac-oustics,1969,17(2):86-92.
[10]宋景唯.线性度对线性调频雷达距离分辨力的影响[J].电子科技大学学报,1992,21(2):121-126.(Song Jing-wei.The influence of linearity of linear frequency-modulated radar range resolution[J].Journal of University of Electronic Science and Technology,1992,21(2):121-126.)
猜你喜欢
设备管理与维修(2021年15期)2021-09-04
水运工程(2020年2期)2020-02-26
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生导刊(2018年34期)2018-12-18
中文信息(2016年1期)2016-07-03
山东青年(2016年3期)2016-02-28
火控雷达技术(2016年3期)2016-02-06
中国设备工程(2015年5期)2015-12-27
百科探秘·航空航天(2015年4期)2015-11-07