
北京地铁 14 号线速度传感器故障探究
2018-03-20 08:25邱新锋
现代城市轨道交通 2018年3期
邱新锋,张 颖
(1. 新誉庞巴迪牵引系统有限公司,江苏常州 213166;2. 常州剑湖金城车辆设备有限公司,江苏常州 213011)
1 故障概述
北京地铁 14 号线中段从 2016 年 4 月开通以来,一些车辆常常报出速度传感器通道故障,采取更换速度传感器、牵引系统部件等方法,故障依然得不到解决。通过对故障车辆进行跟踪,发现通常会有多个速度传感器报出通道故障。1 个速度传感器装置包含 2 个通道,分别称为通道 A 和通道 B,其故障有以下特点。
(1)跟踪时况信号,发现1个牵引变流器(VVVF)控制的 4 根速度传感器的 4 个通道 A 和 4 个通道 B 同时有刺状跳动(图 1)。图 1 中,通道有效位 1 为有效,0 为无效;0 状态即为故障状态。
(2)1 个VVVF 控制的 4 个速度传感器有 1 个速度传感器报出通道 A 和通道 B 故障。

图1 VVVF 系统软件中速度传感器通道实况图
2 速度传感器工作原理
北京地铁 14 号线车辆所采用的速度传感器为霍尔双通道速度传感器。传感器探头安装位置在齿轮箱小轴端尾部,齿轮箱小轴端处有一模数为 2 的测速齿盘,齿数为80。速度传感器可感应导磁体上凸起的齿或者是凹下的槽,当金属齿经过霍尔传感器前端时,引起磁场变化,霍尔元件检测到磁场变化,并转换成 1 个交变电信号,传感器内置电路对该信号进行放大、整形,输出良好的矩形脉冲信号。
速度传感器测量的速度信号通过内部封装的数字电路进行处理,并将电压信号转换成方波信号进行输出。方波信号和采样周期传递到 VVVF 系统控制单元内的现场可编程门阵列(FPGA)读入并存储,然后由控制单元内的数字信号处理器(DSP)读入并进行处理。
3 传感器故障查找方案
根据以上现象,需要分别对速度传感器硬件部分、牵引控制软件部分、走行部件、车辆运行区间进行分析。为了便于分析,需要从以下几个方面进行查找。
(1)检查速度传感器原件是否存在故障,包括检查速度传感器外观、速度传感器磁性探头是否有损伤或者是否吸附了较多齿轮箱内部的铁粉。
(2)检查速度传感器连接插头处插针是否存在松动、开路、屏蔽层破损等异常现象。
(3)测量测速齿轮与速度传感器磁性探头之间的气隙是否符合安装规范要求。
(4)模拟测试不同工况下的状态,以判断牵引变流器牵引驱动控制软件是否存在缺陷。
(5)在载客运行线路上进行实况测试,找出信号跳动的区域。
4 检查及测试结果分析
4.1 传感器的检查与测量
速度传感器原件的检查结果表明速度传感器外观完好,探头部位无任何磨损,无任何铁粉吸附。更换新的速度传感器,故障仍然存在,说明故障与速度传感器本身无任何关系。
对单个速度传感器的输出脉冲进行了测试,在负载电阻为 750 Ω时,高电平大约为 12 V,低电平小于等于 1 V,符合高电平 0.8Vcc(工作电压,电压为 15 V)要求。
检查速度传感器插头至牵引控制单元处,虽为双端接地,但经过单独单端验证并未发现故障现象消失,可以判断接地不是造成故障产生的原因。
对速度传感器探头与测速齿轮之间的气隙进行了塞尺测量,尺寸在 1.0 mm 左右,符合安装规范中的 1.0 mm±0.5 mm 标准要求。
4.2 牵引控制系统的模拟测试
在实际载客运营中的一段线路上进行了模拟试验,采集相关信号,并对软件系统中的速度信号进行分析。
试验采用 3 种速度下的 2 种工作模式对软件中的速度信号进行了加载测试,并通过上位机进行跟踪采集。工况模式见表1。

表1 模拟测试模式
通过对车辆空载情况下的试验数据进行监控可以看出,速度传感器信号质量存在很大的问题。
图 2 为使用 DSP 上位机监控软件所检测的波形图。从图 2 可以看出,车辆在低速状态时和牵引电机输出恒转矩时的电机电磁角速度信号噪声电平(干扰信号的幅度)比较低,而车辆从恒速开始惰行和 VVVF 被封锁的2 种情况下噪声电平却会增大。

图2 0~45km/h 速度信号的典型轨迹
电机电磁角速度ω与转子机械角速度Ω的关系为:ω=Ω·P,P为磁极对数。
将图 3 上的速度信号时域放大,从图 4 可以看出所监控的通道 A 和通道 B 具有非常相似的跟踪,这表明测量的信号确实包含噪声电平。
由于速度传感器所检测到的电机电磁角速度存在很严重的噪声电平,需要对时域监控的速度信号及牵引控制中平均速度下的速度信号再次分析,以判断较高的噪声电平是否来自于控制系统。
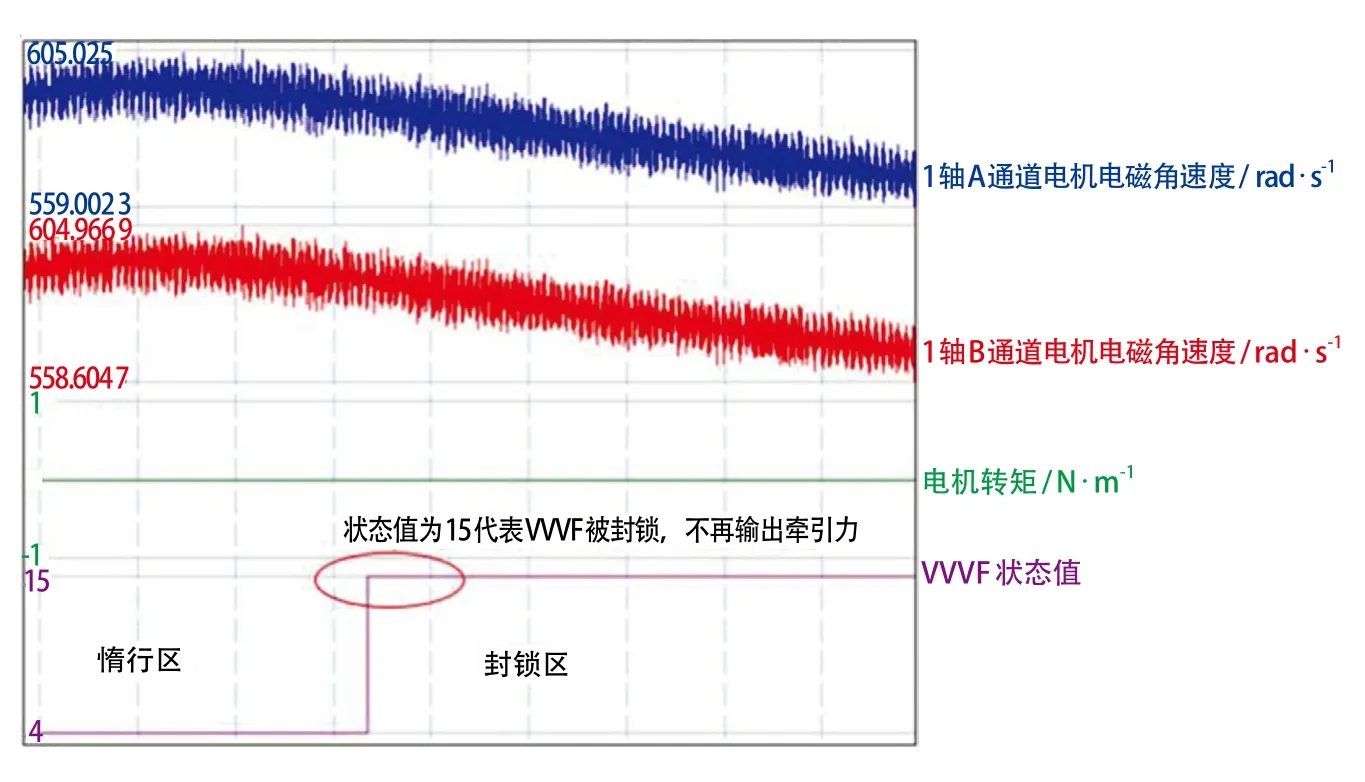
图3 恒速惰行并封锁VVVF状态下的信号监控

图4 速度传感器通道A和通道B监控的电机角速度
4.2.1 加速恒转矩试验
对低速和恒转矩阶段的信号进行频域分析。从图5频域图中可以看出,存在一个 35 Hz 左右的频率峰值信号。虽然直流电路输入滤波器的谐振频率也是 35 Hz,但通过检测直流电路的电压和电流,表明采样值里的 35 Hz 不是出自控制回路或输入滤波器的谐振频率,而且控制信号中包含的 35 Hz 频率很少。
从图 5 的频域图中可以看出,速度传感器输入的 1 轴A 通道的电机电磁角速度中包含了 1 个最高振幅为 35 Hz的信号。
在牵引控制系统中,控制使用的是平均速度信号,对同一时刻平均速度的时域进行频域变换可见,噪声振幅很低,说明控制中使用的平均速度噪声很小(图 6)。
对控制系统中所使用的平均速度信号的测试结果表明,控制回路输出的噪声值很低,对电机电磁角速度信号的影响小。

图5 VVVF 在恒转矩下的速度信号频域图
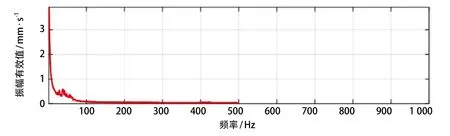
图6 控制中所使用的牵引平均速度频域图
4.2.2 变流器在惰行工况下处于激活状态
如果噪声是由于控制回路引起的,那么在受控制影响较大的低速恒转矩期应该有很高的噪声;惰行情况下,变流器不再控制,噪声也应该减小。从图 7 和图 8 可以看出,在变流器惰行情况下的速度噪声电平比在变流器工作输出牵引力情况下的平均速度噪声电平振幅大。
对变流器惰行状态下的平均速度信号分析也可以看出,信号里面也包含很多个幅值较小的频率信号。
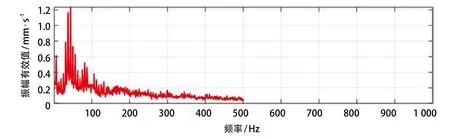
图7 变流器惰行状态时的速度信号频域图

图8 变流器惰行状态时的牵引平均速度频域图
4.2.3 变流器在惰行工况下处于非激活状态
再次将 VVVF 变流器封锁以完全排除控制系统对信号的影响。对 1轴 A 通道电机电磁角速度所测结果见图 9,由此可以更清晰地看出有多个频率信号存在,且振幅比VVVF 激活状态下的更高。这意味着这些异常频率由与电机控制系统无关的外部机械振荡产生。
通过对测试信号的分析可以说明,传感器上的速度信号噪声电平不是来自于 VVVF 的控制系统,这与牵引控制软件无关。
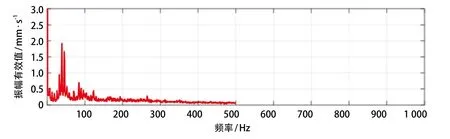
图9 变流器非激活状态下的速度信号频域图
4.3 在运营线路区间跟踪测试
在对牵引控制系统分析完成后,需要进一步分析在何种外部条件下会产生速度信号有效值的跳动。为此,再次对14 号线北京南站—善各庄全程区间进行了跟车监控。
从监控的数据可以看出,速度传感器跳动最密集失效区域一般在图 10 红色圈中的几个区域。所对应的实际路标位置见图 11。

图10 北京南站—善各庄运行区间监控记录
从图 10 和图 11 的监控记录可以看出:在不同运行区间里速度传感器信号会有不同程度的跳动。同一运行区间里同一个转向架上的 2 个速度传感器信号跳动一致;而同一运行区间里的 2 个转向架虽都有跳动,但跳动的密度也有区别。根据这一细微之处的差别分别对 2 个转向架上的 4 组走行轮对进行了初步的检查,发现:
(1)轴 1 的轮对比较平缓,磕碰较少;
(2)轴 2 上的车轮边缘有非常明显的龟裂现象,轮缘上有大的磕碰,存在失圆现象;
(3)轴 3、轴4 上的轮对也存在轴 2 的现象(图12)。
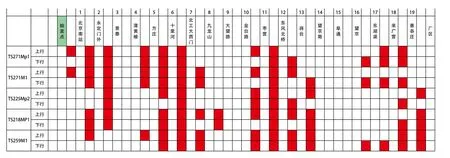
图11 列车运营区间线路速度传感器跳动状态

图12 车轮磨损状态
同时,对运营线路所监控的速度信号选取一个时间段内的信号并展开(图 13、图 14),可以看出有非常相似的轨迹,表明测量的信号包含了外部的噪声(振动)。
在速度传感器内部封装的 2 个霍尔探头固定在不同的位置,相位角相差 180°,故正常情况下的速度传感器信号轨迹不应相同。图 15 为新车上所监控的速度传感器的 4 个通道电机电磁角速度轨迹图。
从测试结果可以看出,速度传感器通道信号故障的发生与车辆运行区间的路况有关,也与走行部件的轮对磨损严重程度有关。单方面改变运行路况或降低车辆车轮的磨损或许可以减少问题的发生。
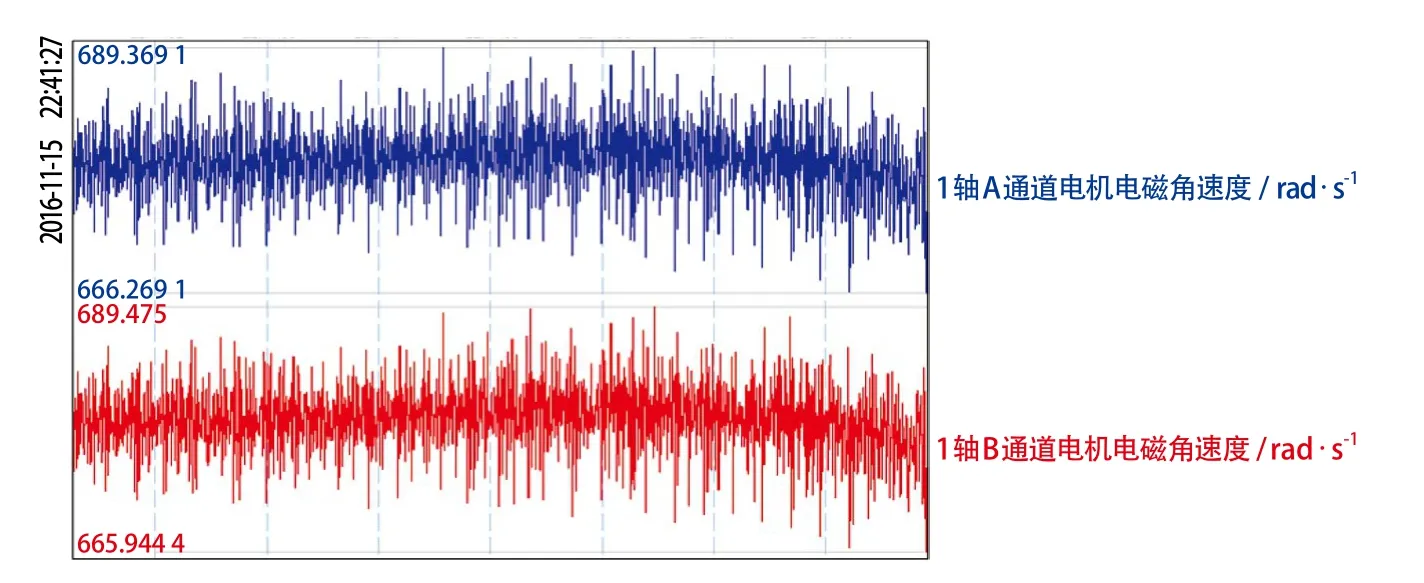
图13 1轴2个通道测量的速度信号

图14 故障速度传感器双通道信号放大图
5 验证
由于改变线路轨道状况工程量较大,只能从车辆入手,即通过对走行部件的轮对进行镟轮,重新恢复车轮的圆整度,可以降低车辆的振动。对镟轮后的结果进一步验证,图 16 为镟轮后的监控数据。
将图 16 与图 10 信号进行对比可以看出,车辆在线路东段运行时全程 4 个速度传感器的 8 个通道有效值一直为 1 并保持不变,未再出现之前的信号跳动现象。
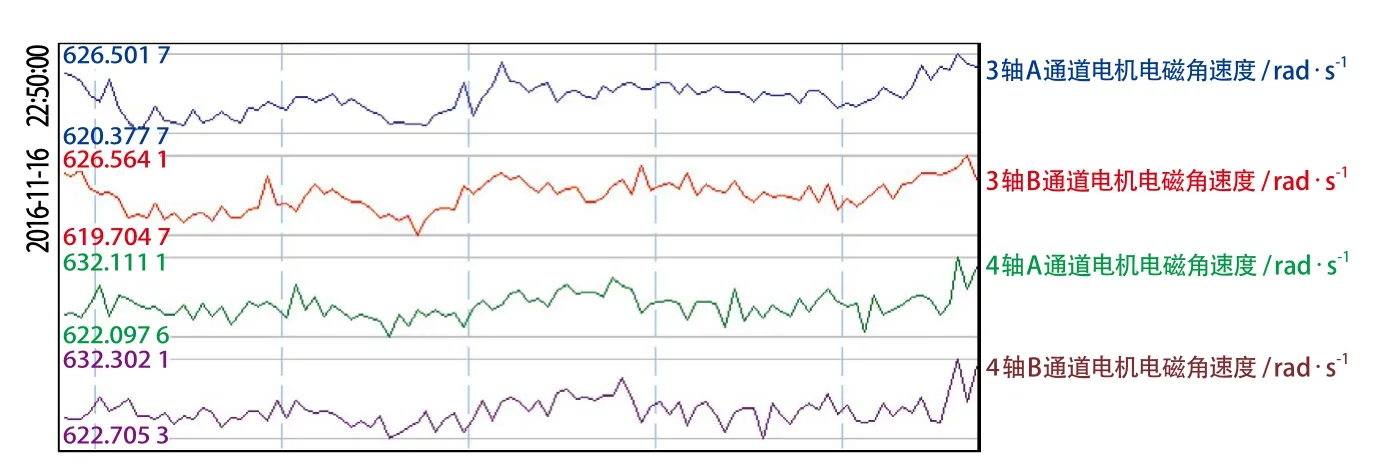
图15 正常速度传感器2个通道信号轨迹
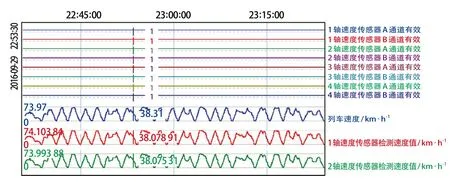
图16 镟轮后速度传感器信号(北京南站—善各庄)
6 结论
通过对车辆牵引控制系统的速度信号及实际运营路况下的信号分析和验证结果可以得知,磨损的车轮经过轨面状况较差的线路,产生的机械振动会影响速度传感器的信号质量。随着车辆投入运营时间的增加,需要定期对磨损严重的轮对进行检修,做好维护保养,以降低速度传感器通道故障现象的发生。
[1]程佩青.数字信号处理教程[M].北京:清华大学出版社,2013.
[2]童敏明,唐守锋,董海波.传感器原理与检测技术[M].北京:机械工业出版社,2014.
[3]宋宇,朱伟华,董括,等.传感器及自动检测技术[M].北京:北京理工大学出版社,2013.
[4]丁荣军,黄济荣.现代变流技术与电气传动[M].北京:科学出版社,2009.
[5]张存礼.消除霍尔传感器误差的有效方法[J].电气时代,2006(4):102-103.
[6]蒋方方.轨道用霍尔传感器的应用[J].电子工程师,2004,30(7):68-69.
[7]李玉江,张向明.霍尔传感器用于角度测量的一种方法[J].电子机械工程,2001(4):25-26.
[8]丁荣军.交流传动机车牵引特性曲线与变流器牵引电机系统的匹配[J].机车电传动,1999(6):11-16.
猜你喜欢
成都信息工程大学学报(2021年1期)2021-07-22
电子制作(2019年10期)2019-06-17
通信电源技术(2018年5期)2018-08-23
雷达学报(2018年3期)2018-07-18
中学生数理化·八年级物理人教版(2017年9期)2017-12-20
北京航空航天大学学报(2017年3期)2017-11-23
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
火控雷达技术(2016年1期)2016-02-06
噪声与振动控制(2015年4期)2015-01-01
