铁路智能电子警冲标设计研究
2018-03-20 06:38杨文韬张义川
铁道运输与经济 2018年3期
史 宏,张 岩,杨文韬,张义川
SHI Hong, ZHANG Yan, YANG Wen-tao, ZHANG Yi-chuan
(中国铁道科学研究院 运输及经济研究所,北京 100081)
(Transportation & Economics Research Institute, China Academy of Railway Sciences, Beijing 100081, China)
1 概述
铁路警冲标是用来确定机车车辆停车位置的信号标志[1],其作用是使停放在道岔后部两线汇合处的车辆不妨碍邻线上的列车运行,保证行车安全[2]。列车进站后,应停于接车线警冲标内方,否则属于越过警冲标事故。随着列车运行监控记录装置的广泛运用和列车超速防护、调车监控系统的不断推广[3-4],对有效防止列车越过警冲标事故起到了良好作用。
目前铁路警冲标还存在以下问题:现有铁路警冲标没有实现电子化,不能判断车辆是否超越警冲标停车并发出明显的报警信息,以提醒司机注意停车位置;现有警冲标不具备声光报警功能,不便于司机和地面调车辅助作业人员在夜间、阴雨、大雾天气进行观察;现有警冲标没有通信功能,不能将警冲标状态发送到地面监控中心,不便于车站监控中心对于压标作业进行监视。为解决现有铁路警冲标面临的问题,亟需设计一种铁路智能电子警冲标,自动判断车辆是否超越警冲标停车,发出报警信息,提醒司机注意停车位置,预防超过警冲标事故。
2 铁路智能电子警冲标设计
2.1 结构及模块功能设计
铁路智能电子警冲标包括警冲标帽、警冲标体、灯罩、走线孔、报警灯、报警控制模块、喇叭、CPU 处理模块、无线通信模块、位置速度传感器数据采集模块、供电单元和电缆孔等模块。铁路智能电子警冲标结构如图 1 所示。
警冲标帽和警冲标体拼装在一起,构成完整的铁路智能电子警冲标。灯罩位于警冲标帽的上方,与传统警冲标不同,铁路智能电子警冲标需要具备透明的灯罩,用来传输报警光源。位置速度传感器数据采集模块,用于接收外接传感器的位置速度信息,并将信息转化为 CPU 处理模块的规范输入格式。位置信息为轨道上两点之间的铁路智能电子警冲标监视区域内是否有列车占用,速度信息为监视区域内的列车运行速度。报警控制模块接收 CPU 处理模块的报警命令,控制报警灯和喇叭发出声光报警信息,CPU 处理模块可以设置报警控制模块的报警持续时间。CPU 处理模块向无线通信模块发送铁路智能电子警冲标状态,包括:空闲、移动占用、停车占用报警和占用报警。无线通信模块采用无线局域网的方式[5-6],将铁路智能电子警冲标状态信息发送至监控中心。同时,无线通信模块可以接收外部手持机、监控中心等设备通过无线发送的标准格式的配置参数,并转送给 CPU 处理模块进行设置[7]。供电单元接入外部太阳能电池,转化成铁路智能电子警冲标内各电子单元的工作电压,通过走线孔实现与各电子单元的供电线路连接。电缆孔用于引入外部太阳能电池和车轮传感器的线缆。

图1 铁路智能电子警冲标结构图Fig.1 Structure of railway intelligent electronic fouling post
2.2 外观与安装方式设计
铁路智能电子警冲标与现有铁路警冲标的尺寸一致,距轨枕顶面高度为 300 mm,一侧为白色,一侧为红、白、红相间,宽度均为 100 mm。铁路智能电子警冲标高出轨枕面距离为 300~350 mm。铁路智能电子警冲标安装位置示意图如图 2 所示,铁路智能电子警冲标设在两会合线路间距为 4 m 的中间,图中铁路智能电子警冲标与线路上的垂直点b 和 d 点之间的距离均为 2 m。当股道间距不足 4 m时,铁路智能电子警冲标应设在两线路中心线最大间距的起点处;在线路曲线部分所设道岔附近的铁路智能电子警冲标与线路中心线的间距,应按限界的加宽增加。a,b,c 和 d 为监视边界点,a 与 b之间和 c 与 d 之间分别为铁路智能电子警冲标旁边的2 条相邻线路上的监视区域。a 与 b 之间的距离 Dab可设置为 20 m;c 与 d 之间的距离 Dcd可以设置为20 m。位置速度传感器采用车轮传感器[8],为了考虑车轮与车头、车尾之间的距离,则需要在轨道上的 a0,b0,c0和 d0共 4 个车轮监视边界点上安装车轮传感器,车轮监视边界点与监视边界点的距离Fa,Fb,Fc和 Fd可以配置为 3.5 m。
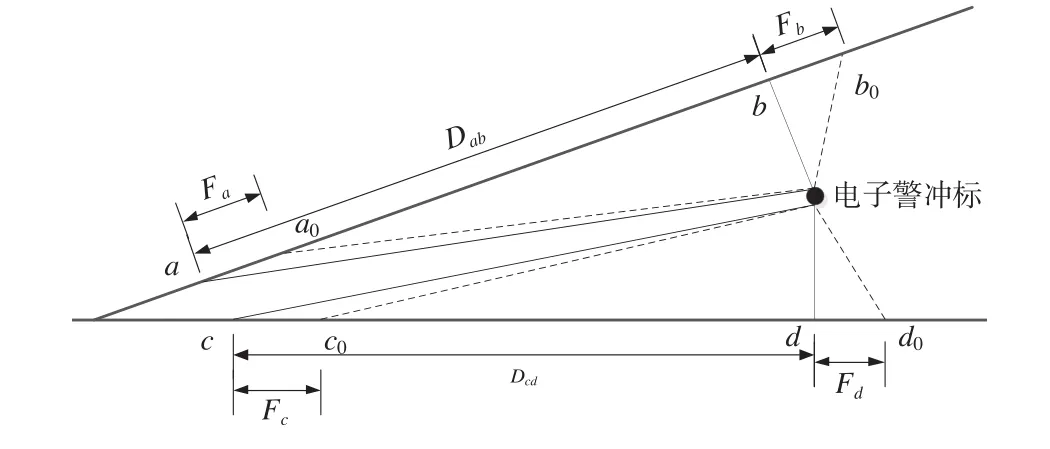
图2 铁路智能电子警冲标安装位置示意图Fig.2 Installation location schematic fi gure of railway intelligent electronic fouling post
2.3 列车占用监测算法
铁路智能电子警冲标利用车轮传感器采集位置信息[9],具体为相同轨道上 2 个监视边界点之间的监视区域内是否有列车占用,需要比较进入和驶离监视区域两端车轮监视边界点的列车轴数,来完成监视区域空闲与占用状态检查。
如果监视区域被列车占用,则需要进一步采集列车速度信息。由于车轮与轨道接触点不连续,只有在列车车轮通过车轮传感器时才能检测出列车速度,需要利用公式计算列车当前速度,计算公式为
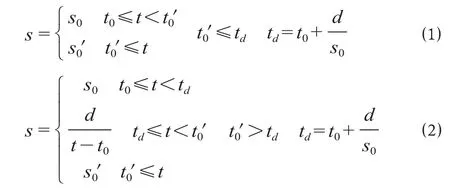
式中:s 为列车速度;s0为车轮通过车轮传感器瞬间测量到的速度;s0′为下一个车轮通过任意车轮传感器的速度;t 为 当前时间;t0为当前车轮经过监视区域任一端的时间;t0′为下一个车轮经过监视区域任一端的时间;d 为 a0和 b0或 c0和 d0之间的距离;td为按列车速度为匀速 s0计算的列车匀速通过监视区域的时间。
在列车加速行驶的情况下,下一个车轮经过监视区域任一端的时间 t0′小于列车匀速通过时间 td。按照公式 ⑴,当前时间 t 在下一个车轮还未经过监视区域之前,列车当前速度 s 为车轮通过车轮传感器瞬间测量到的速度 s0;当前时间 t 在下一个车轮经过监视区域之后,列车当前速度为下一个车轮经过监视区域任一端的速度 s0′。
在列车减速行驶不改变运行方向的情况下,下一个车轮经过监视区域任一端的时间 t0′大于列车匀速通过时间 td。按照公式 ⑵,当前时间 t 在列车匀速通过时间 td之前,列车当前速度 s 为车轮通过车轮传感器瞬间测量到的速度 s0;当前时间 t 在列车匀速通过时间 td之后,在下一个车轮经过监视区域之前,列车当前速度 s 为通过距离除以时间估算列车速度,当估算速度小于规定值时,设 s 为零;当前时间 t 在下一个车轮经过监视区域之后,列车当前速度为下一个车轮经过监视区域任一端的速度 s0′。
在列车减速行驶并改变运行方向的情况下,列车速度值可为负。当下一个车轮经过监视区域任一端的时间 t0′小于列车匀速通过时间 td的时候,可按照公式 ⑴ 计算列车速度;当下一个车轮经过监视区域任一端的时间 s0′大于列车匀速通过时间 td的时候,可按照公式 ⑵ 计算列车速度,当估算速度小于规定值时,设 s 为零。
2.4 工作模式及流程
铁路智能电子警冲标具有停车越界报警和越界报警 2 种工作模式,其中:停车越界报警,需要根据列车的位置信息和速度信息,判断列车是否越过警冲标停车,并控制输出报警命令;越界报警,需要根据列车的位置信息,判断列车是否越过警冲标,并控制输出报警命令。
当铁路智能电子警冲标工作在“停车越界报警”模式下,CPU 处理模块向无线通信模块发送的铁路智能电子警冲标状态包括空闲、移动占用、停车占用报警;当铁路智能电子警冲标工作在“越界报警”模式下,CPU 处理模块向无线通信模块发送的铁路智能电子警冲标状态包括空闲、占用报警。“越界报警”模式下分析处理过程示意图如图 3 所示。“停车越界报警”模式下分析处理过程示意图如图 4 所示。
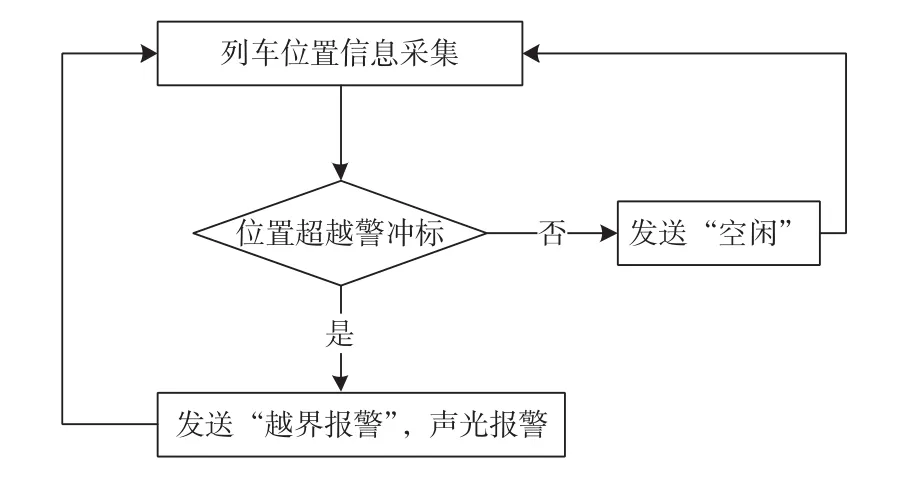
图3 “越界报警”模式下分析处理过程示意图Fig.3 Analysis and dispose process schematic fi gure of crossing the line model

图4 “停车越界报警”模式下分析处理过程示意图Fig.4 Analysis and dispose process schematic fi gure of stopping and crossing the line model
在“越界报警”模式下,CPU 处理模块只根据列车位置信息判断列车是否越过警冲标停车,具体分析处理过程如图 3 所示。位置速度传感器数据采集模块接收列车位置信息,将列车位置发送给 CPU处理模块。CPU 处理模块判断列车位置是否超越警冲标,如否,命令无线发送模块向地面发送警冲标状态为“空闲”并返回初始状态继续采集列车位置信息;如是,CPU 处理模块命令无线发送模块向地面发送警冲标状态为“越界报警”,并命令报警控制模块通过报警灯和喇叭发出时长大于一个控制周期的报警警报。
在“停车越界报警”模式下,CPU 处理模块根据列车的位置和速度信息,判断列车是否越过警冲标,具体分析处理过程如图 4 所示。位置速度传感器数据采集模块接收列车位置和速度信息,将列车位置和速度发送给 CPU 处理模块。CPU 处理模块判断列车位置是否越过警冲标,如果未越过警冲标则命令无线发送模块向地面发送警冲标状态为“空闲”并返回初始状态继续采集列车位置信息,如果越过警冲标,CPU 处理模块判断列车速度是否为零。如果速度不为零则命令无线发送模块向地面发送警冲标状态为“移动占用”并返回初始状态继续采集列车位置信息;如果速度为零,CPU 处理模块命令无线发送模块向地面发送警冲标状态为“停车占用报警”,并命令报警控制模块通过报警灯和喇叭发出时长大于一个控制周期的警报。
2.5 应用效果
铁路智能电子警冲标已经接入到自行研发的车务安全监控平台,一旦探测到越界,则触发报警控制模块,控制报警灯和喇叭发出声光报警信息,并且通过无线通信模块将相关铁路智能电子警冲标的工作状态发送到地面车务安全监控平台,车务安全监控系统接入方案如图 5 所示。现场应用表明,铁路智能电子警冲标具有以下效果:①能自动判断车辆是否超越警冲标停车,并发出明显的声光报警信息,提醒司机注意停车位置;②铁路智能电子警冲标便于司机和地面调车辅助作业人员在夜间、阴雨、大雾天气进行观察;③铁路智能电子警冲标具有无线通信功能,除了发出声光报警,还能将警冲标状态发送到地面监控中心,便于车站监控中心对于压标作业进行监视,及时作出相应的调度调整。

图5 车务安全监控系统接入方案Fig.5 Train operation safety monitoring system access scheme
3 结束语
铁路智能电子警冲标实现了铁路警冲标的智能化、电子化,可以有效警示司机注意停车位置,减少越标停车事故,使得监控中心可以自动采集站场警冲标附近的监控状态信息,为监控中心调度人员的指挥提供信息化手段。铁路智能电子警冲标在全路车务站场的推广应用,将促进站场车务作业管理信息化发展,实现体系架构和安全监控管理模式的创新,提高车务站场调度指挥效率,降低安全风险,减少事故对人员、设备和环境带来的损失。
[1] 陈广存. 铁道信号概论[M]. 北京:中国铁道出版社,2003.
[2] 杨小燕,王立松. 基于威胁分析的高速铁路行车安全风险评估方法[J]. 铁道运输与经济,2017,39(1):71-76.YANG Xiao-yan,WANG Li-song. Risk Assessment Method for High-speed Railway Traffic Safety based on Threat Analysis[J]. Railway Transport and Economy,2017,39(1):71-76.
[3] 武新宇,郭 瑞. 铁路调车作业无线调车机车信号和监控系统的研究[J]. 铁道货运,2014,32(4):26-30.WU Xin-yu,GUO Rui. Study on Wireless Shunting Locomotive Signal and Supervision System of Railway Operation[J]. Railway Freight Transport,2014,32(4):26-30.
[4] 金卫东. 铁路装卸作业防护信号装置安全监控管理的实践[J]. 铁道货运,2017,35(3):31-34,49.JIN Wei-dong. Practice of Safety Monitoring Management of Prevention Signal Equipment of Railway Handling Operation[J]. Railway Freight Transport,2017,35(3):31-34,49.
[5] 郭友波. WLAN 接入控制技术[J]. 现代电子技术,2004,27(19):78-81,83.GUO You-bo. WLAN Access Control Technique[J]. Modern Electronics Technique,2004,27(19):78-81,83.
[6] ZHANG Yan,TANG Tao,LI Ke-ping,et al. Formal Veri fi cation of Safety Protocol in Train Control System[J]. Sci China,2011,54(11):3078-3090.
[7] 张友德. 单片机原理与应用技术手册[M]. 北京:北京航空航天大学出版社,2002.
[8] 周杏鹏. 传感器与检测技术[M]. 北京:清华大学出版社,2010.
[9] 卢 迪,周三强. 车轮传感器电磁分布研究[J]. 哈尔滨理工大学学报,2015,20(2):53-56.
猜你喜欢
数学大王·低年级(2021年2期)2021-02-21
小读者(2019年24期)2020-01-19
现代企业(2019年2期)2019-03-27
汽车观察(2019年2期)2019-03-15
铁道通信信号(2018年5期)2018-06-28
汽车维护与修理(2016年10期)2016-07-10
现代防御技术(2016年1期)2016-06-01
发明与创新·中学生(2016年7期)2016-05-14
诗歌月刊(2015年11期)2015-12-23
小学生·多元智能大王(2015年3期)2015-05-25