基于LED的可见光MISO定位系统中波束成形的研究
2018-03-19 05:26梁尚雨周盈君张梦洁熊良明
照明工程学报 2018年1期
梁尚雨,周盈君,乔 梁,张梦洁,熊良明,迟 楠
(1.复旦大学,上海 200433;2.长飞光纤光缆股份有限公司,湖北 武汉 430070)
引言
由于安全、节能以及无电磁干扰等特点[1],基于LED的可见光通信技术受到越来越多的关注[2-4]。正是由于可见光技术绿色节能的特点,该技术已被越来越多的应用于室内定位系统中[5]。文献[6]提出了一种上行室内三维可见光定位系统。该系统使用角度分集接收机和分布式光电二极管实现定位功能。文献[7]提出了一种反转三维可见光定位系统,该系统仅使用两个光电二极管即可实现室内定位功能。上述文献中的方法确实实现了可见光室内定位,但是他们都忽略了定位信息在同一位置叠加后带来的影响。受系统设备、传输路径或者多路定位信号本身等带来的系统延时的影响,由多个LED发送的定位信息在同一接收机上叠加,接收信号的强度会发生波动,影响定位精度。
1 可见光通信系统传输模型
1.1 单LED发光模型
LED具有辐射特性,当接收的角度不同,接收到的光强度也会不同。我们一般可把LED当作为点光源,其发出的光服从朗伯发光模型[8]。则LED的发光强度可表示为
I(φ)=I0cosmφ
(1)

(2)
其中,光照度的单位为勒克斯(lx),d为传输距离,φ为光线入射角。
1.2 多LED接收模型
图1为基于LED的MISO室内可见光定位系统示意图。图1中的LED1和LED2表示固定在天花板上的发射机,PIN接收机表示定位目标。当定位目标与两个发射机之间的距离不同时,定位信息到达接收机的时间也就不同,从而两路定位信号就可产生相位差。当有相位差的两路信号在同一个接收机上叠加时,信号强度会发生波动,影响定位精度。

图1 室内可见光定位系统示意图Fig.1 Schematic of VLC indoor positioning system
根据公式(2)所示的光照度表达式,考虑到由器件和路径差导致的信号延迟,令LED1发送的信号为s(t)cosωt,LED2发送的信号为s(t)cosω(t+t1+Δt),则在同一个接收机上两路信号叠加后的信号强度为

sinωtsinω(t1+Δt)]
=s(t)cosωt[A1+B1cosω(t1+Δt)]-
B1s(t)sin(ωt)sinω(t1+Δt)
(3)

当我们理论分析出在该种条件下定位精度下降的原因时,就可以运用延迟波束成形的方法控制波束。时延波束成形是指在阵元之间插入时延使波束控制在不同的方向。通过对信号时延波束成形,我们控制在接收端多路信号叠加时是最佳时机,对系统延时差异进行人为的补偿,那么补偿后的信号就不一样了,多路信号叠加后的幅度一直处于相干增强状态,提高定位精度。
2 仿真及结果
根据前文的介绍,通过改变载波频率ω,器件延时t1和路径差延时Δt来研究接收信号的强度。在实验中,由器件导致的延时很难控制,所以我们只仿真由载波频率和路径延时差对接收信号带来的影响。
仿真中,设置中心发光强度为12.73 cd,发光半角设置为45°,LED的高度设置为1.5 m。通过改变接收机PIN和LED的位置,载波频率和路径差延时,得到叠加后的接收信号强度结果如图2所示。当接收机位置按图1所示固定时,随着三个参数的变化,仿真结果如图3所示。

图2 接收信号强度仿真结果Fig.2 Simulation results of the superimposed received signal
从图2的仿真结果中可以很清楚的看到,当LED2发送的信号有一个延时,当两路信号叠加后,随着接收机位置的改变,接收信号的强度会发生干涉现象。从图2的(b)和(d)可以看出,当接收机沿着X轴往正方向改变位置时,接收信号的强度先增加后减小,且按原点呈对称变化。从图2的(c)和(e)可以看出,随着两个LED之间的距离增加,干涉的程度也会相应的增加。另外,随着载波频率的增大,干涉程度也会相应增大。
在图3中,随着传输距离,信号间延时以及载波频率的改变,我们比较在某一固定位置上接收信号的强度变化。从图3(a)可以看到,在不同的接收位置,同一传输距离的条件下,叠加后的接收信号强度有抖动,并且随着传输距离的增加,接收信号的强度呈下降趋势。在图3(b)中,随着两个LED间的距离增加,仿真结果和图3(a)相似。在图3(c)中,当LED2的信号延时为π相位时,接收信号的强度最小。在图3(d)中,当载波频率从500~900 MHz变化时,接收信号的强度在每一位置均有浮动。当载波频率为700 MHz时,接收信号的强度最低。
3 实验及结果
根据上述仿真结果,我们通过实验来调整波束以提高定位精度。实验框图和设置图如图4和图5所示。在实验中,我们使用脉冲幅度调制(PAM)技术。
从图5我们可以看到,调制后的数据输入到任意信号发生器(AWG,Tektronix AWG510)中。AWG将数据输出到均衡电路中。电放大器(EA)用来对信号进行放大,然后通过交直流耦合电路对信号叠加直流信号,接着将信号加载到LED上进行传输。在接收端,两路信号进行叠加,接收机进行光电信号的转换。之后进行离线的信号解调和数字处理。在图5中,LED1和LED2代表固定在天花板上的发射机,PIN代表定位目标。我们通过MATLAB调整载波频率的大小,通过调整接收机的位置改变传输路径。
实验中,为了研究延时对系统精度的影响,我们对LED2发送的数据进行一定的延时,即进行波束的调整和选择,并在接收端测试系统误码率。通过这种方式,既可以直观的看到延时时间对系统性能的影响,又能看出波束成形技术在提高定位精度方面的作用。不同波特率下,系统误码率随LED2信号的延时时间的变化如图6所示。此时,传输距离为1.5 m,接收机位置在两LED的中轴线上。

图3 固定位置接收信号强度仿真结果Fig.3 Simulation results of the superimposed received signal on fixed position
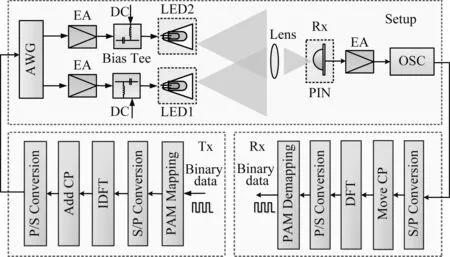
图4 可见光实验系统框图Fig.4 Block diagram of VLC experiment system

图5 实验设置图Fig.5 Experimental setup
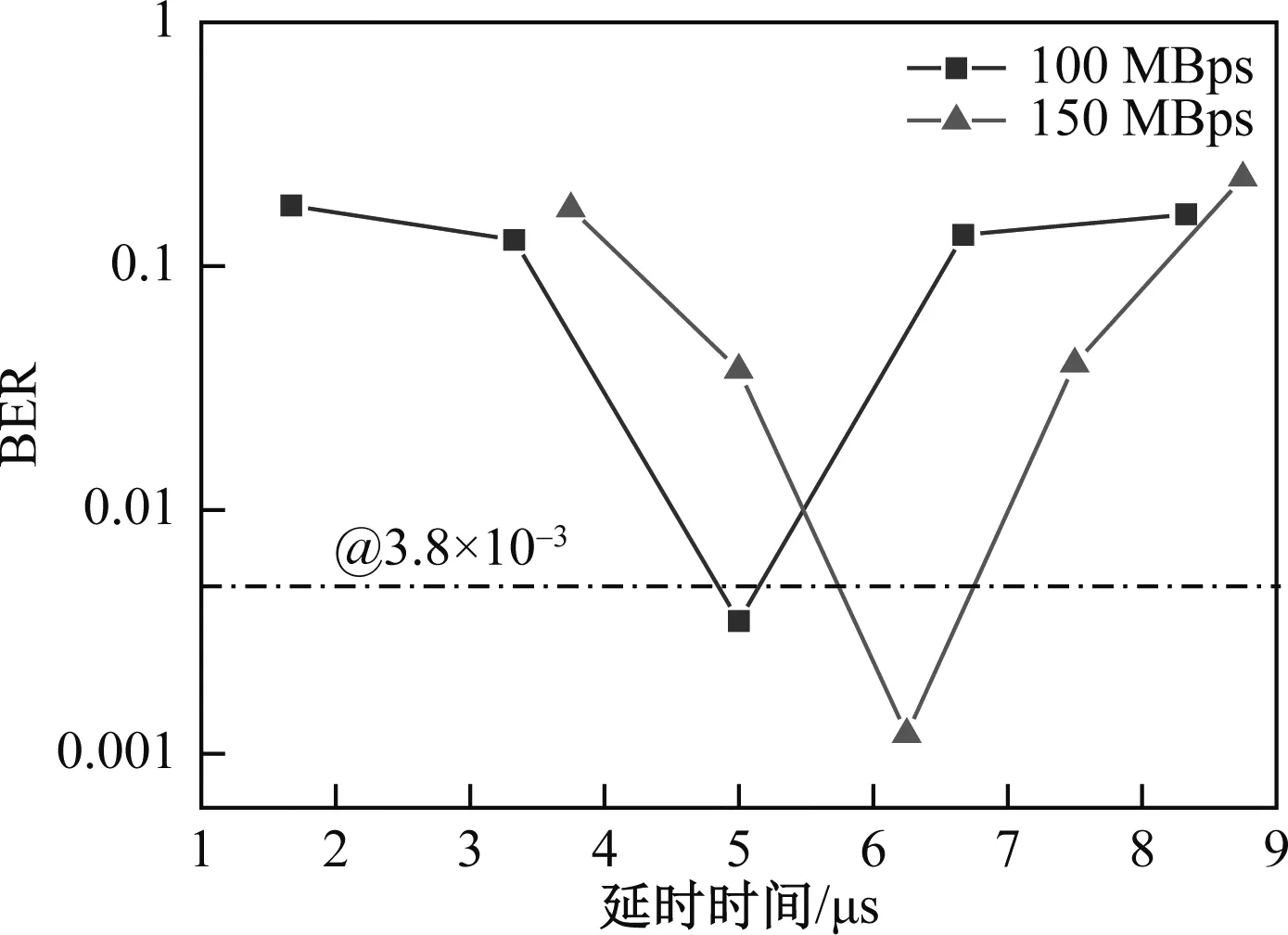
图6 不同波特率下系统误码率随信号延时时间变化曲线Fig.6 BER with different delay time under the condition of different baud rate

图7 系统误码率变化曲线Fig.7 BER curve
从图6我们可以看出,当发射机和接收机在固定位置时,即系统延时为固定时,在LED2发送信号的延时能抵消系统延时的条件下,系统误码率最低。当系统传输波特率为150 Mbps条件下,LED2的信号延时为6.25 μs时,系统的误码率最低。另外,我们还可以看到,系统传输速率越低,误码性能相对较差。当系统误码率为最低时,LED2的信号延时时间即为系统带来的信号间延时差。根据此结果可以看出,如果我们对LED2发送的原始定位信息在该种情况下进行确定的6.25 μs延时调整,则此波束即可减少该条件下由系统延时带来的定位精度下降的问题,而其他延时时间的波束则和系统延时不匹配,使系统的误码率升高。
当发射机固定时,系统误码率随接收机位置变化的曲线如图7(a)所示。当接收机固定时,系统误码率随LED间距离变化的曲线如图7(b)所示。此时,发射机和接收机之间的距离为1.5 m。从图7(a)中可以看到,当接收机在不同位置时,即系统延时不同时,在LED2信号的延时时间抵消系统延时的条件下,系统误码率最低。当接收机分别在LED1和LED2正下方以及中垂线上时,系统的延时时间分别为7.5 μs、5 μs和6.25 μs。从图7(b)中可以看到,随着LED间距离的改变,接收信号的强度也会发生波动。当LED间的距离分别为0.8 m,1.1 m和1.5 m时,系统延时分别为5 μs、6.25 μs和7.5 μs。同样地,根据此结果可知。如果我们对LED2发送的原始定位信息进行相应的确定的延时时间调整,则波束可减少由系统延时带来的定位精度下降的问题。
4 总结
为了提高室内三维可见光定位系统的定位精度,我们对基于LED的MISO可见光通信系统中的波束复型进行了研究。通过实验,我们发现当定位目标接收来自不同LED的定位信息时,由于系统延时的存在,接收信号的强度会发生波动,这种现象会降低定位精度。当我们对某个发射机的信号进行延时后发现,在该延时在能抵消系统延时的波束成形条件下,系统误码最低,提高了定位精度。
[1] 高飞,郑炳松.中国绿色照明工程发展与实施回顾[J].照明工程学报,2017,27(4) :1-7.
[2] CHI N, SHI J, ZHOU Y, et al. High speed LED based visible light communication for 5G wireless backhaul[C]. Proc. 2016 IEEE Photon Soc Summer Topical Meeting Ser, 2016: 4-5.
[3] WANG Y, TAO L, HUANG X, et al. 8-Gb/s RGBY LED-Based WDM VLC System Employing High-Order CAP Modulation and Hybrid Post Equalizer[J]. IEEE Photonics J, 7(6): 1-7.
[4] 程宇. 白光LED无线通信的研究进展[J]. 照明工程学报, 2016, 27(3): 107-112.
[5] 牛衍方,孙德栋. 可见光通信在智能照明中的室内定位应用[J]. 照明工程学报, 2016, 27(6): 104-107.
[6] YIN L, WU X, HAAS H. Indoor visible light positioning with angle diversity transmitter[C]//Vehicular Technology Conference (VTC Fall) 2015 IEEE 82nd. 2015: 1-5.
[7] XU Y, ZHAO J, SHI J, et al. Reversed Three-Dimensional Visible Light Indoor Positioning Utilizing Annular Receivers with Multi-Photodiodes[J]. Sensors, 16(8): 1254.
[8] WEAST R C. CRC Handbook of Chemistry and Physics[M].64 edition. Boca Raton: CRC Press, 1983.
[9] 梅卫平. 基于白光LED的可见光通信系统的研究[D]. 长沙:中南大学, 2011.
猜你喜欢
雷达与对抗(2022年1期)2022-03-31
自动化仪表(2020年10期)2020-11-13
通信学报(2020年10期)2020-11-03
电子制作(2019年14期)2019-08-20
计算机与数字工程(2019年7期)2019-07-31
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
雷达学报(2017年1期)2017-05-17
舰船电子对抗(2016年6期)2017-01-18
对联(2015年22期)2015-06-11