
基于多目标优化的图像增强算法研究
2018-03-15 11:09郑瑾
武夷学院学报 2018年12期
郑 瑾
(福建船政交通职业学院 信息工程系,福建 福州350007)
图像增强的目的是提高图像的亮度、对比度和细节,以此更好地表达图像的视觉信息。与传统的图像增强技术[1-2]相比,基于噪声的信号增强和图像处理是一种全新的技术[3-5]。由于非线性系统中噪声能够增强微弱信号的检测能力,因此该类技术能够在输入图像或信号中加入噪声以提高算法的性能。这种信号、噪声和非线性随机系统所产生的协同现象被称为随机共振。主要贡献是设计了一种基于多目标优化的图像增强方法,通过求解有约束的多目标优化问题,得到增强图像所添加噪声的最优参数。
1 问题建模
主要研究如何改进现有的几种图像增强算法,并保持其结构不变,包括算法的参数不变。为了达到这一目标,首先将图像增强问题建模为带有约束条件的多目标优化问题,如下所示:


多目标优化问题(1)的目标是同时优化函数f1(x)和 f2(x,y),其中,函数 f1(x)表示了增强后图像 x 的特性;函数f2(x,y)是增强后图像x与原始图像y的相似度;约束条件用于防止图像过增强 (over-enhancement)现象的出现,即保证了经过增强处理后的图像至少与原始图像具有一定的相似性。增强后的图像表示为 x=D(y),D 是图像增强算法。 由问题(1)可知,扩大解的可行域能提高算法的性能。在扩大可行域之后,通过求解带有约束的MOOP就能产生帕累托前沿(即非支配解),然后使用标准从帕累托前沿中选择更合适的解。降低s的值是扩大可行域的另一种方法。但是,如果将s值设置过低,则可能无法保持增强图像与原始图像之间的相似性。因此必须将s设定为一个合理的常数,并使用随机共振噪声来扩大可行域。
假设n是随机共振噪声,其概率密度函数为Pn(n)。我们将噪声添加到原始图像的每一个像素中,得到具有噪声的图像z,其中z=y+n。对噪声图像z应用图像增强算法D,能得到带有噪声的增强图像x',即x'=D(z(n))。 此时,对于每一个原始图像 y,我们将可行域从x扩大成为x'。接下来,我们使用凸组合进一步扩大可行域。我们给每一个参与组合的增强图像分配相等的权重,可得

式(2)中,K是凸组合中增强图像的个数,每一个增强图像的权重是1/K。对于给定的K,我们根据相互独立的概率分布函数Pn(n)生成最多K个噪声矩阵。至此,我们通过添加噪声和凸组合的方式,扩大了多目标优化问题的可行域。扩大可行域后的多目标优化问题如下所示:

然而,确定随机共振噪声的最优概率密度函数取决于图像增强算法 D、f1(x)、f2(x,y)和原始图像的性质。 因此,我们需要预先确定噪声的形式及其参数。虽然这种做法并不能找到最优的噪声参数,但能使算法易于实现。这是因为在实际应用中难以找到确定噪声最佳形式所需的信息。我们从噪声库中选择合适的噪声形式,噪声库中包含多个具有可调参数的随机共振噪声,例如高斯噪声。帕累托最优前沿包含了最优噪声的非支配解,是通过求解优化问题(3)得到的。增强图像的最终解决方案是根据式(4)所示的准则从帕累托最优前沿中选择噪声的最佳参数。
一般来说,很难得到多目标优化问题(3)的解析解。因此,采用带精英策略的非支配排序遗传算法求解优化问题(3),即寻找优化问题(3)的帕累托最优前沿。如果引入噪声会降低增强图像的质量,则不会使用噪声。事实上,从人视觉的角度出发,从帕累托最优前沿中选择的噪声并不一定能保证增强图像会有更好的质量。因此,我们提出一个符合人类视觉系统标准的选择方案。优化问题(3)中的两个目标函数分别代表不同的图像特征,将它们结合起来能使增强图像更符合人类视觉系统的标准。使用两个目标函数的线性组合作为评价图像质量的标准,并以该标准从帕累托最优前沿中选择合适的解。对于权重w1、w2,若帕累托最优前沿的解满足优化问题(4),该解即为合适的解。
这种选择方案的优点是能够通过线性组合同时考虑增强图像的不同特征。此外,在人类视觉系统的指导下,可以显著降低解集的大小。我们选择特定的目标函数对来说明该图像增强算法的有效性。对于函数f2(x,y),我们采用结构相似度函数来度量增强图像和原始图像的一致性,该函数如式(5)所示。

Sim(x,y)的值越高,则说明增强图像和原始图像的相似度越高。图像的对比敏感度信息是图像质量的重要指标。 对于函数 f1(x),我们选择函数 CS(x)(如式(6)所示)作为图像对比敏感度的度量,以提高增强图像的对比敏感度。式(6)中,L、W 分别是图像的长和宽,co(m,n)是分解系数,csf(m,n)是对比敏感度函数,计算方式如下所示[6]:

接下来是采用多目标遗传算法求解优化问题。适应度函数的定义如下:FitFun(z,y)=w1f1(C(z))+w2f2(C(z),y),其中(z,y)变量对代表一个个体。 如果适应度函数中的权重值(即、)是常数,那么算法的搜索方向就会被固定。为了不陷入局部最优解,我们采用随机的权重值,从不同的搜索方向出发搜索帕累托最优解。随机权重的计算方式如公式(7)所示。

其中,Ui服从[0,1]的均匀分布,因此是属于区间[0,1]的实数。在多目标遗传算法的执行过程中,每一代都要存储和更新一组帕累托最优解。从每一代的集合中随机选择一定数量的个体,这些个体被称为精英。这种精英保护策略在维持种群多样性方面具有一定的作用。算法的伪代码如下所示。该算法提出一种基于非支配排序的遗传算法,通过结合父代和后代种群并选择最好的帕累托解来创建一个匹配池。该算法的主要伪代码如表1所示。
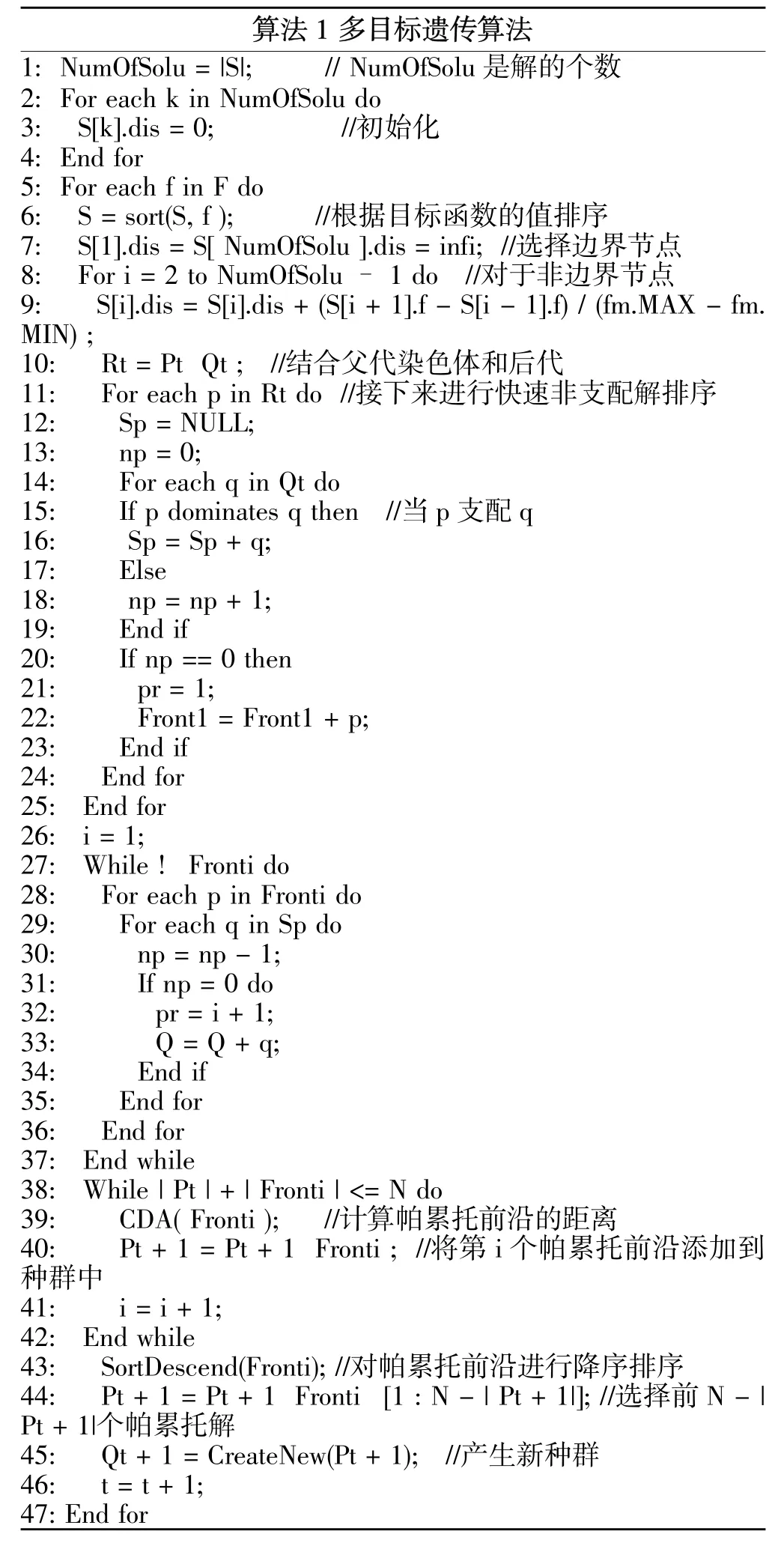
表1 多目标遗传算法Table 1 Multi-objective genetic algorithm
2 性能评估
本节对提出的算法性能进行评估。实验的参数设置如下:遗传算法的种群规模为100,算法迭代的代数为50,参数K为35,参数s为0.6。我们将提出的算法与基于非线性传递函数的方法(NTrF)[7]和基于对比度的方法(ConB)[8]进行比较,考察该算法在图像指标和视觉效果两方面的性能。考察的图像指标包括了平均偏差、信息熵、标准差、相关性以及计算开销。我们从谷歌数据库中选取了20多幅图像作为测试图像,由于篇幅有限,仅呈现其中3幅图像的实验结果。表2是三种算法在不同图像指标下的结果,图1呈现了三种算法在视觉效果方面的实验结果。结合表2和图1的结果可知,该算法不仅有较好的图像指标,而且还有很好的视觉效果。

表2 三种算法的图像指标结果Table 2 Result of image indicator among three algorithms

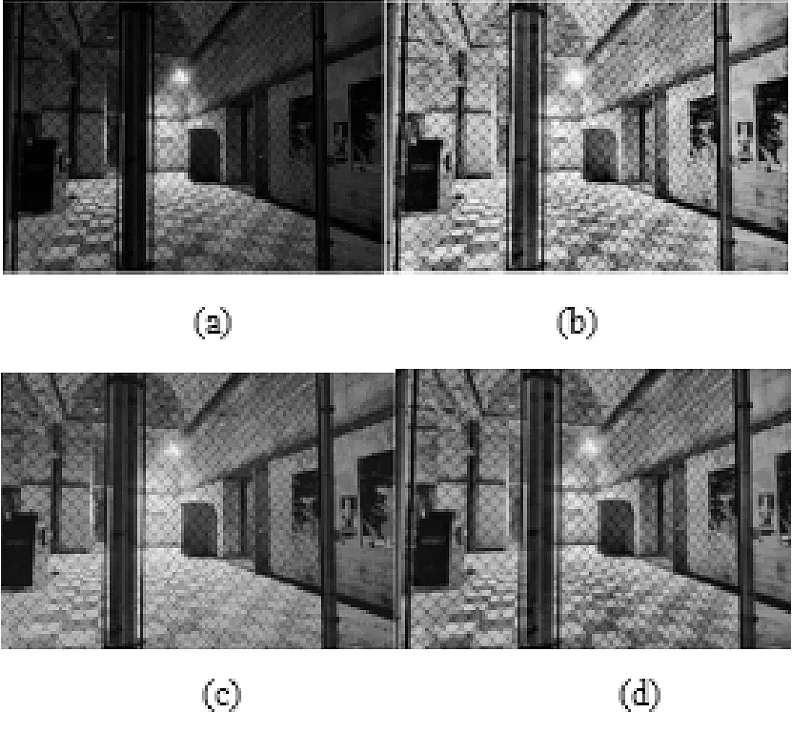
图1 三种算法的视觉效果Figure1 Result of visual effect among three algorithms
3 结论
将图像增强问题建模为一个带有约束的多目标优化问题,通过加入随机共振噪声改善解的帕累托最优前沿,并采用多目标遗传算法求解最优噪声参数。实验结果表明,该算法具有良好的性能。未来的研究方向在于研究不同随机共振噪声对图像增强的影响。
猜你喜欢
燃气涡轮试验与研究(2021年6期)2021-08-01
成都信息工程大学学报(2021年1期)2021-07-22
海洋信息技术与应用(2020年4期)2021-01-18
中国生物医学工程学报(2019年5期)2019-07-16
中山大学法律评论(2018年2期)2018-03-30
北京航空航天大学学报(2017年3期)2017-11-23
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
天津经济(2016年10期)2016-12-29
现代计算机(2016年34期)2016-02-28
智能系统学报(2015年4期)2015-12-27
