
基于UniTire模型的平顺性和操纵稳定性协同研究∗
2018-03-15 10:55张初旭
汽车工程 2018年2期
李 杰,高 雄,王 维,张初旭
前言
平顺性和操纵稳定性是汽车的两个重要性能,以往大多单独对平顺性或操纵稳定性进行研究[1-3],忽略了两个性能之间的联系和相互影响。
开展平顺性和操纵稳定性协同研究,首先应该选用合理的技术路线。试验研究、虚拟样机技术和理论分析是进行协同研究的3种技术路线。
试验研究能检验理论分析成果和发现研究存在的问题,但缺点是需要实物样机、成本高周期长。虚拟样机技术是采用商业化软件如Adams,Carsim和Trucksim等开展研究,省去了理论建模和软件研发等工作,缺点是只能当黑箱使用、前处理工作量巨大和一般也要存在实物样机才能应用。理论分析采用质量、阻尼、刚度和几何参数等描述实际零部件,通过定律和定理建立力学、数学和仿真模型,可合理设置自由度,参数确定的工作量少,求解迅速,效果令人满意,且一般可以无需实物样机。
平顺性和操纵稳定性之间通过轮胎发生联系。当汽车行驶在不平路面上时,会引起轮胎垂直载荷变化,导致轮胎侧偏力变化,因而对操纵稳定性产生影响[4]。
UniTire模型是由郭孔辉提出的表达在各种工况下轮胎特性的模型,具有很好的理论性、实用性和很高的精度[3-5]。
本文中基于UniTire模型,同时考虑路面不平度对平顺性和操纵稳定性进行协同研究,采用理论分析方法建立具有一般意义的协同模型,提出一次实现两个性能协同仿真的算法,既可克服单独研究的局限性,也有助于更好认知两个性能之间的联系,为汽车性能优化和动力学控制等提供新的研究思路。
1 轮胎和路面的模型
1.1 UniTire模型
UniTire模型侧向力表达式[4-5]为
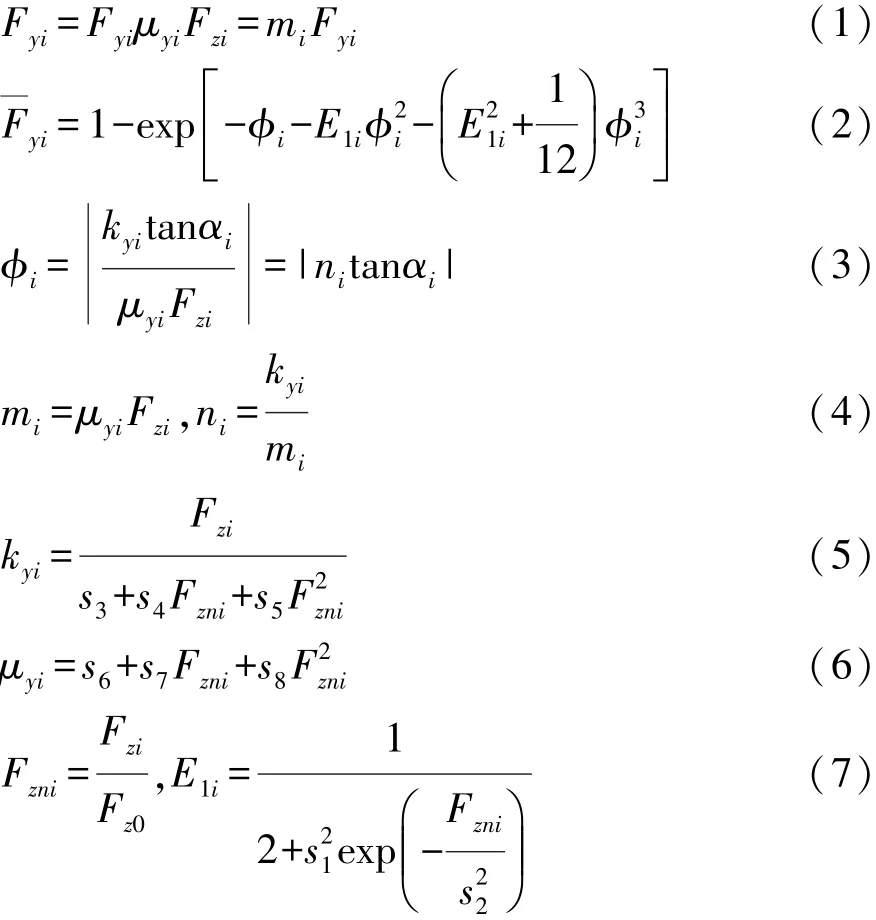
式中:Fyi为轮胎侧偏力;Fyi为无量纲轮胎侧偏力;μyi为侧向摩擦因数;Fzi为轮胎垂直载荷;φi为无量纲侧向滑移率;kyi为轮胎侧偏刚度;αi为轮胎侧偏角;Fzni为无量纲垂直载荷;Fz0为轮胎额定载荷;s1~s8为单一工况UniTire模型侧向特性参数;mi和ni为中间参数。
UniTire模型是非线性模型,它退化为线性模型时,侧向力表达式为

1.2 滤波白噪声路面模型
前轮路面不平度激励 qf的滤波白噪声模型[6-7]为

式中:nq为下限截止空间频率;u为车速;n0为参考空间频率;Gq(n0)为路面不平度系数;w为均值为0、方差为1的标准高斯白噪声。
采用1阶Pade逼近描述同一车道上滞后前轮的后轮路面不平度激励qr[8],推导得

式中:td=(a+b)/u为后轮滞后前轮时间;a,b分别为车身质心到前、后轴的纵向距离。
2 平顺性和操纵稳定性的平面模型
2.1 平顺性4自由度平面模型
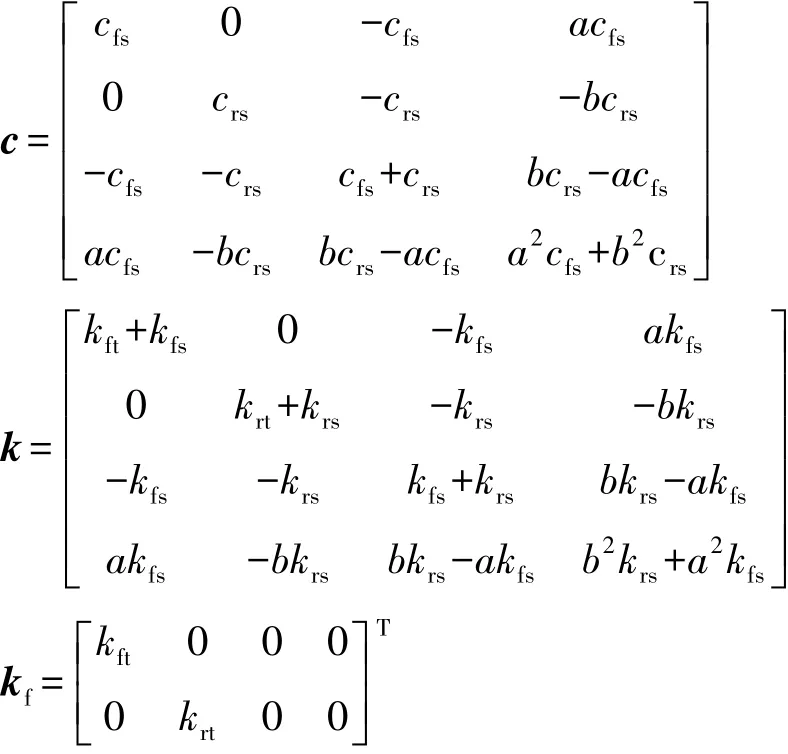
采用平面假设,建立平顺性4自由度平面模型。其中,自由度为车身质心垂直位移zb、车身绕质心角位移zby,前、后轴非簧载质量的垂直位移zf,zr;惯性参数为车身质量mb,车身绕其质心的转动惯量mby,前、后轴非簧载质量mf,mr;阻尼参数为前、后轴悬架的垂直阻尼cfs,crs;刚度参数为前、后轴悬架的垂直刚度 kfs,krs,前、后轴轮胎的垂直刚度 kft,krt。
对平顺性4自由度平面模型,应用拉格朗日方法,有

其中 z=[zf,zr,zb,zby]T;q=[qf,qr]T
前、后悬架动挠度ffd,frd分别为

前、后轴轮胎静载Gf,Gr由静态平衡关系推导得出:

在不平路面上行驶时,前、后轴轮胎动载Ffd,Frd分别为

2.2 操纵稳定性2自由度平面模型
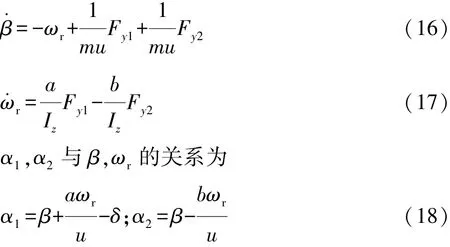
基于平面假设,且假设行驶在不平路面上,汽车简化为2自由度平面模型。其中,自由度为汽车质心侧偏角β,汽车横摆角速度ωr;惯性参数为汽车质量m,汽车横摆转动惯量Iz,轮胎参数为前、后轮胎侧偏角 α1,α2,前、后轮胎侧偏力 Fy1,Fy2;输入为前轮转角δ。
对操纵稳定性2自由度平面模型,应用牛顿第二定律,有
在不平路面行驶时,前、后轴载荷Fz1,Fz2为

汽车质心侧向加速度ay为

3 平顺性和操纵稳定性协同模型与实现
3.1 路面的状态方程
取 q=[qf,qr]T,联立式(10)和式(11),路面的状态方程为


3.2 平顺性的状态方程
对式(15)进行变换,得到平顺性的状态方程为

3.3 操纵稳定性的状态方程
取 x2=[β,ωr]T,联立式(16)和式(17),得到操纵稳定性的状态方程为

3.4 协同模型
综合路面、平顺性和操纵稳定性的状态方程,可建立平顺性和操纵稳定性协同模型。
首先,联立式(21)和式(22),得


其次,联立式(24)和式(23),得


在不平路面上行驶时,Fy1,Fy2与 α1,α2,Fz1和Fz2有关,由UniTire模型决定。为了求解,需要引入下述表示,即
3.5 协同仿真算法
平顺性和操纵稳定性协同模型仿真,是由式(25)结合UniTire模型,在时域内进行求解,获得平顺性和操纵稳定性的响应量序列,具体的仿真算法如下:
(1)总模拟时间、采样时间分别取T,Δt,计算离散点的个数 N=T/Δt+1,离散时间点 ti=i×Δt,i=0,1,2,…,N,i=0,设置{x(0)}=0;
(2)由式(25)计算矩阵M,N和Q;
(3)生成N个离散点的高斯白噪声序列w(i),i=1,2,…,N;
(4)由式(19)、式(14)和式(15)计算Fz1(i)和Fz2(i),i=1,2,…,N;
(5) 给定 δ,由式(18)计算 α1(i)和 α2(i),i=1,2,…,N;
(6)对非线性UniTire模型,由式(1)~式(7)计算Fzn1(i)和 Fzn2(i),E11(i)和 E12(i),ky1(i)和ky2(i),μy1(i)和 μy2(i),m1(i)和 m2(i),n1(i)和 n2(i),φ1(i)和 φ2(i),Fy1(i)和Fy2(i),i=1,2,…,N;
对线性UniTire模型,由式(8)和式(9)计算ky1(i)和 ky2(i),Fy1(i)和 Fy2(i),i=1,2,…,N;
(7)应用4阶龙格 库塔方法求解式(25),得到{x(i)},i=1,2,…,N;
(8)由{x(i)}得到协同模型各响应的时间序列,通过二次差分运算,得到加速度响应。
3.6 协同仿真结果和分析
采用某轿车参数,取B级路面和常用车速u=60km/h,前轮转角δ=0.1rad,单一工况UniTire模型侧向特性参数通过轮胎试验获得。按照协同模型仿真算法,采用Matlab开发仿真软件,对协同模型进行仿真,仿真结果,即路面激励、平顺性和操纵稳定性的响应如图1~图3所示。
由图1可见,前轮和后轮的路面激励在同样的范围变化,且两者存在一定滞后时间,说明基于滤波白噪声模型能模拟前后轮的路面激励。
图2示出车身质心加速度、车身俯仰角加速度、前后悬架动挠度和前后车轮相对动载的变化与范围,由这些结果可分析乘坐舒适性、悬架布置合理性和行驶安全性。而且,这些振动响应量不随轮胎模型而变化。
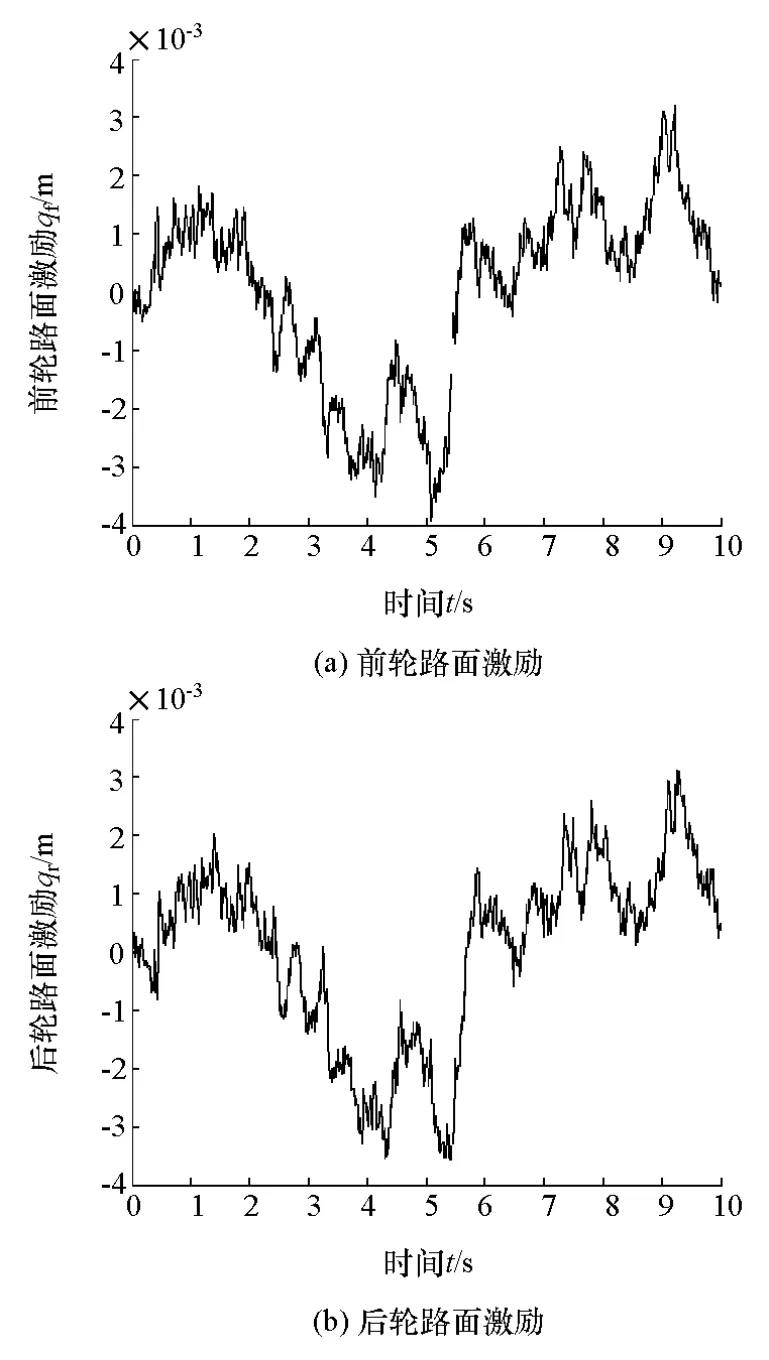
图1 路面激励仿真结果
由图3可见:前轮固定转角输入的质心侧偏角、横摆角速度和侧向加速度的变化与范围;这些响应都会出现一定程度的波动,说明协同模型体现出路面不平度对操纵稳定性的影响;线性UniTire模型和非线性UniTire模型的操纵稳定性结果不同,由图可明显看出,线性轮胎模型仿真得到的质心侧偏角、横摆角速度和侧向加速度,都大于非线性轮胎模型仿真的对应结果,说明以往采用线性轮胎模型研究操纵稳定性偏于保守。
采用响应均方根值并考虑响应正负表示响应的综合效果,协同模型与单独的平顺性模型和操纵稳定性模型结果的比较,如表1和表2所示。应当说明的是,由于均方根值没有考虑响应的负号,如果响应的主要结果是负号,为反映响应的负号,在均方根值前加负号作为综合表示。
由表1可见,平顺性模型和协同模型的车身质心加速度、车身俯仰加速度、前后悬架动挠度和前后车轮相对动载完全相同,说明操纵稳定性模型对平顺性模型没有影响。
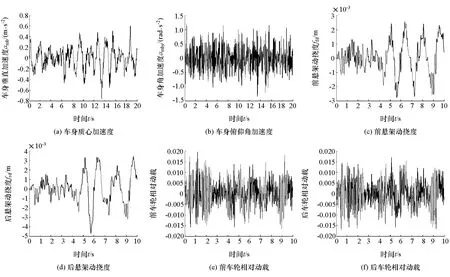
图2 平顺性仿真结果
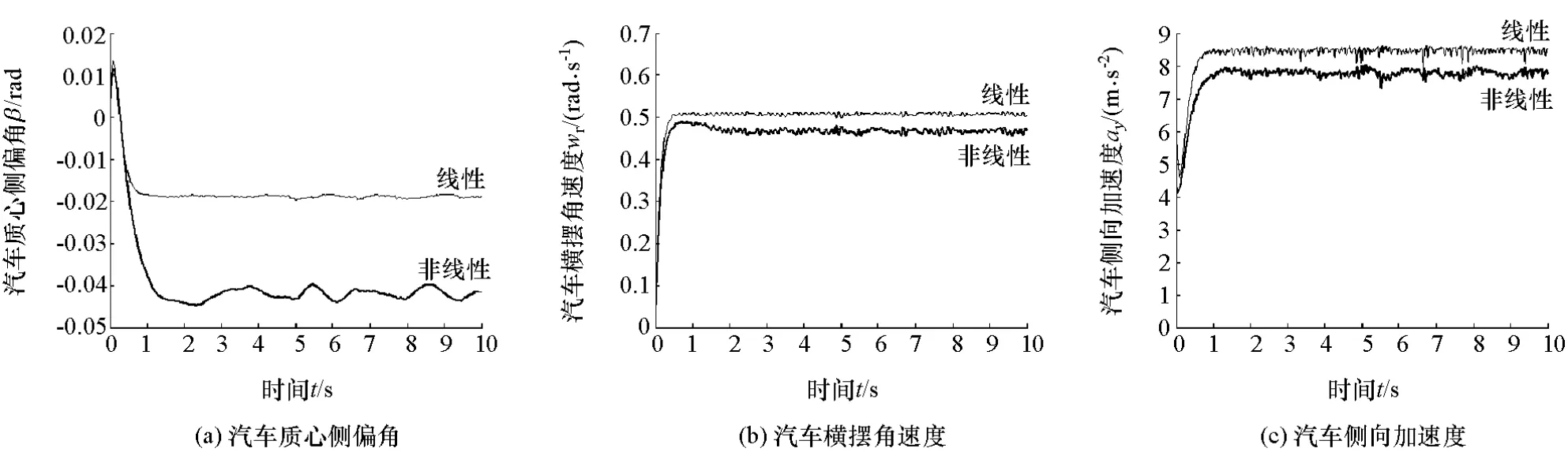
图3 操纵稳定性仿真结果

表1 平顺性模型和协同模型响应的比较

表2 操纵稳定模型和协同模型响应的比较
由表2可见,操纵稳定性模型和协同模型的质心侧偏角、横摆角速度和侧向加速度不同,但两种模型仿真得到3个参数的大小并无一定的规律。
4 结论
基于UniTire模型,考虑不平路面,采用前后轮路面不平度激励的滤波白噪声模型、平顺性4自由度平面模型、操纵稳定性2自由度平面模型,通过状态方程建立了平顺性和操纵稳定性6自由度平面协同模型,并给出了相应的协同仿真算法,开发了相应的Matlab仿真软件,可以一次实现前后轮路面不平度激励、平顺性和操纵稳定性的仿真。
进行了不平路面下某轿车平顺性和操纵稳定性的协同仿真,结果表明:对于操纵稳定性,线性轮胎模型仿真得到的质心侧偏角、横摆角速度和侧向加速度都大于非线性轮胎模型仿真的对应结果;对于平顺性模型和协同模型,两者同样的响应的结果是相同的;而对于操纵稳定性模型和协同模型,两者同样的响应的结果不同,但两种模型仿真得到3个参数的大小并无一定的规律。由此说明,平面协同模型能体现平顺性对操纵稳定性的影响,不能体现操纵稳定性对平顺性的影响,这主要是由于操纵稳定性模型没有与平顺性平面模型耦合的力学量。因此,有必要建立空间协同模型,以便全面反映平顺性和操纵稳定性之间的影响关系。
[1] 余志生.汽车理论[M].北京:机械工业出版社,2010.
[2] 李杰,王文竹,赵旗,等.基于虚拟激励法的军用汽车随机振动分析[J].汽车工程,2016,38(3):368-372.
[3] 郭孔辉.汽车操纵动力学原理[M].南京:江苏科学技术出版社,2011.
[4] 陈焕明,郭孔辉.轮胎性能对车辆操纵稳定性影响的仿真研究[J].汽车工程,2015,37(5):491-494,505.
[5] 郭孔辉.UniTire统一轮胎模型[J].机械工程学报,2016,52(7):89-98.
[6] 陈绍维.微型客车平顺性建模、仿真及参数匹配研究[D].长春:吉林大学,2011.
[7] 朱延蕾.多轴重型特种汽车在不同路面下振动性能的仿真与评价[D].长春:吉林大学,2014.
[8] 陈璐,王雨顺.保结构算法的相位误差分析及其修正[J].计算数学,2014,36(3):271-290.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车工程师(2021年12期)2022-01-17
资源信息与工程(2021年5期)2022-01-15
今日农业(2021年11期)2021-11-27
北京航空航天大学学报(2021年4期)2021-11-24
少儿科学周刊·少年版(2020年9期)2020-03-04
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
科技与创新(2018年10期)2018-05-23
科技创新导报(2016年4期)2016-11-19
