太浦闸活动桥面液压同步升降技术的应用
2018-03-13 09:48
水利建设与管理 2018年2期
(太湖流域管理局苏州管理局,江苏 苏州 215011)
1 前 言
太浦闸修建于20世纪50年代,位于江苏省苏州市吴江区境内,西距太湖约2.0km,是太湖流域骨干河道太浦河的泄洪及输水建筑物。为改善太湖航行条件、促进地方经济发展,2012年12月27日水利部批复太浦闸除险加固工程10号节制闸孔变更为套闸的设计报告。为尽量减少对原设计的影响,控制土建投资和满足船舶过闸净空的要求,在不改变太浦闸原有任务和功能的前提下,将套闸交通桥设计成活动桥面。
2 组成原理
太浦闸活动桥面为单跨简支钢梁结构,长12.9m、宽8.5m、高0.7m、重40.1t。活动桥面下部两侧闸墩各垂直安装2个顶推力400kN、升降速度0.3m/min的液压油缸,利用液压同步升降系统使4个液压油缸的活塞杆从0mm(2100m)同步伸出(收缩)至2100m(0mm),带动活动桥面平稳升降。该液压同步升降系统由液压控制系统、计算机控制系统和手动控制系统三部分组成,并具备多种安全保障措施。
2.1 液压控制系统组成原理
液压控制系统由油箱、电动机、高压油泵、溢流阀、电磁换向阀、桥式换向回路、电磁比例流量阀、液控单向阀和液压油缸等主要元件组成。上升活动桥面时,电动机带动高压油泵输出液压油,经溢流阀溢流后产生12MPa的工作压力油,工作压力油经电磁换向阀和桥式换向回路换向后,分4路通过电磁比例流量阀和液控单向阀进入液压油缸,此时4个活塞杆同步伸出,活动桥面上升。下降活动桥面时,经溢流阀溢流产生2.5MPa工作压力油经电磁换向阀换向后,分4路打开液压油缸的液控单向阀,4个液压油缸内的液压油分别经桥式换向回路和电磁换向阀换向后,通过电磁比例流量阀流回油箱,此时4个活塞杆在活动桥面的重力下同步收缩,活动桥面下降。液压控制系统如图1所示。
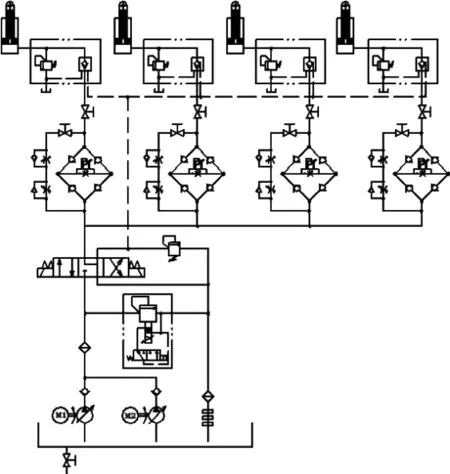
图1 液压控制系统
2.2 计算机控制系统组成原理
计算机控制系统用于控制液压元件,由工控机、触摸屏、可编程逻辑控制器(PLC)、电子比例放大器、位移传感器、压力传感器等主要部件组成。工控机用于远程控制,能实时显示液压元件的运行情况(开度、高差、压力等,下同)并记录整个控制过程供以后查询。触摸屏用于现地控制,可输入开度、高差和压力等上下限控制参数并实时显示液压元件的运行情况。PLC和4组(每个液压油缸1组)位移传感器、电子比例放大器、电磁比例流量阀构成闭环控制,连续检测4个液压油缸之间的行程高差并自动调整同步;当某组的电子比例放大器或电磁比例流量阀出现故障,则打开该组桥式换向回路的高压球阀,其他3组仍可连续检测正常液压油缸与故障液压油缸之间的行程高差并自动调整同步。闭环控制流程及计算机控制流程如图2、图3所示。
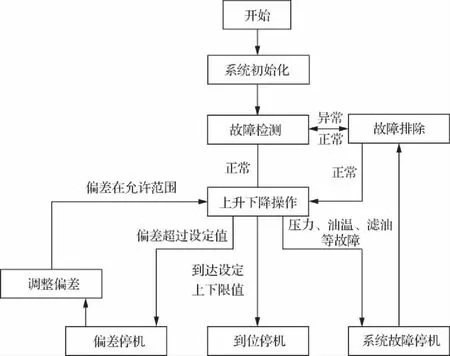
图2 闭环控制流程

图3 计算机控制流程
2.3 手动控制系统组成原理
手动控制系统在上述液压、电气元件的基础上由控制按钮、电磁换向阀手柄、单向节流阀和桥式换向回路的高压球阀手柄等组成,手动控制系统分“按钮控制”和“手柄控制”两种控制方式,在计算机控制系统出现故障无法正常使用时应急升降活动桥面。“按钮控制”时,首先按高压油泵的启动按钮,延时10s后按液压油缸的上升(下降)总按钮,活动桥面平稳上升(下降);在活动桥面运行过程中,当4个液压油缸的行程高差超过控制参数时,立即按液压油缸的停止总按钮,然后逐个点动4个液压油缸的调整按钮使液压油缸行程同步。“手柄控制”时,首先打开4个高压球阀手柄,接着按高压油泵的启动按钮,延时10s后根据活动桥面上升(下降)的要求操作电磁换向阀换向手柄,活动桥面平稳上升(下降);在活动桥面运行过程中,当4个液压油缸的行程高差超过控制参数时,逐个调整4个高压球阀手柄使液压油缸行程同步。
3 安全措施
由于太浦闸套闸用于船舶通航,涉及人员和船舶的生命、财产安全,活动桥面升降的可靠性和船舶过闸的安全性至关重要。为此,液压同步升降系统在PLC程序的设计和液压元件硬件的配置中采取多项安全保障措施。
3.1 PLC程序设计中的安全措施
a.活动桥面上升(下降)过程中,位移传感器连续检测4个液压油缸的行程,电磁比例流量阀自动调节流量,确保同步高差不大于10mm;当同步高差大于20mm时报警,大于30mm时高压油泵停止运行。
b.活动桥面上升(下降)过程中,4个位移传感器中的任意1个因卡阻等故障导致液压油缸位移数据停止变化5s时,高压油泵停止运行。
c.活动桥面处于全开位置时,由于液压油缸内部泄漏导致下滑量达到100mm时,主高压油泵启动将活动桥面上升至全开位置;如主高压油泵未能启动,继续下滑量达到200mm时,副高压油泵启动将活动桥面上升至全开位置,同时发出报警信号。
3.2 液压元件硬件配置中的安全措施
a.液压系统管路中装有油压压力传感器,当油压超过额定压力时发出报警信号,达到最高压力时高压油泵停止运行。
b.液压油箱中装有油温传感器和油位传感器,当油温过高时发出报警信号,油位过低时高压油泵停止运行。
c.由于活动桥面下部的4个液压油缸之间通过高压橡胶软管连接,一旦软管爆裂后果不堪设想,为此每个液压油缸的缸体上都装有液控单向阀,可在故障时及时锁定液压油缸,确保活动桥面不会下滑或倾斜。
4 注意事项
虽然太浦闸活动桥面的液压同步升降系统已经在PLC程序的设计和液压元件硬件的配置中采取了多项安全保障措施,但是在日常的运行管理和维护保养中还应注意以下事项。
4.1 运行管理注意事项
a.同步升降系统必须配备经过专门培训、考试合格、持证上岗的专业操作人员。
b.活动桥面升降前,同步升降系统的软、硬件均应处于正常、可靠状态,各岗位工作人员通信联络畅通。
c.活动桥面升降过程中,计算机控制系统出现故障无法正常使用时,从手动控制系统中选用“按钮控制”或“手柄控制”方式进行应急控制。
d.活动桥面升降过程中,严禁无关人员、车辆及船舶靠近,现场工作人员必须密切监视活动桥面的运行工况。
e.活动桥面升降到位、液压油缸锁定可靠后,闸室内和交通桥上的船舶、人员、车辆才能通航或通行。
4.2 维护保养注意事项
a.液压油缸的位移传感器安装在室外,工作条件恶劣,必须采取防潮湿、防沙尘等措施,以免位移数据跳跃而影响活动桥面的正常升降。
b.手动控制系统“手柄控制”时,活动桥面上升(下降)的同步高差依赖4个高压球阀手柄的调整精度,因此日常维护保养时高压球阀手柄精度的调整工作不容忽视。
c.PLC、位移传感器、电子比例放大器和电磁比例流量阀构成的闭环控制过程需要一定的时间,因此高压油泵的流量和液压油缸的速度不宜调整得过大、过快,否则活动桥面在升降过程中容易发生抖动现象,从而影响同步精度。
5 结 语
太浦闸除险加固工程自2014年9月16日完工移交运行管理单位以来,活动桥面已安全运行百余次(含船舶通航和日常维护),实践证明由液压控制、计算机控制和手动控制3种功能组成的同步升降系统是安全、可靠的,工程管理单位运行管理和维护保养方法是正确的。
猜你喜欢
探索科学(学术版)(2021年5期)2021-06-10
装备制造技术(2020年11期)2021-01-26
冶金设备(2020年2期)2020-12-28
水电站机电技术(2019年11期)2019-12-02
纤维复合材料(2018年2期)2018-12-07
电子制作(2018年11期)2018-08-04
水电站机电技术(2018年2期)2018-03-05
广东技术师范大学学报(2016年5期)2016-08-22
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10