基于改进型模糊控制器的内置式永磁同步电机全速域控制
2018-03-13 06:24:12王慧敏张雪锋李新旻王志强
新型工业化 2018年1期
王慧敏,张雪锋,李新旻,王志强
(天津市电机系统先进设计与智能控制技术工程中心,天津工业大学 天津 300387)
0 引言
内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor,IPMSM))将永磁体埋入转子内部,具有机械强度高、磁路气隙小、转矩密度大等优点,可以在较宽的负载率范围和转速范围内均拥有良好的效率和功率因数特性,在电动汽车领域获得了越来越多的应用[1-4]。为了充分利用磁阻转矩,在逆变器容量不增加的前提下提升系统性能,内置式永磁同步电机在低速运行时采用最大转矩电流比(Maximum Torque Per Ampere,MTPA)控制策略,运行在恒转矩区域;在高速运行时采用弱磁控制策略,运行在恒功率区域[5-9]。无论是MTPA控制还是弱磁控制,都必须基于准确的电机模型参数。然而,实际中,电动汽车用IPMSM系统常存在负载扰动和转速波动等非理想情况,系统参数也会随着运行工况的改变而变化,传统的PI控制策略难以满足系统抗扰性能好、鲁棒性强的要求。近些年来,由于具有不依赖于电机模型参数、鲁棒性强等优点,模糊控制算法在内置式永磁同步电机控制系统中逐渐取得了应用。文献[10]提出了一种模糊控制算法,解决了传统PI控制策略中出现的依赖性强、抗扰性差等问题。文献[11]速度环采用模糊控制器,并设计了暂态和稳态模糊效率控制器,提高了暂态和稳态性能以及系统的运行效率。上述文献均未考虑电机弱磁区运行控制问题。文献[12-13]利用模糊逻辑控制器代替传统PI控制器,提高了系统的动态性能和参数鲁棒性,但是并未考虑模糊控制器存在的稳态误差问题。
本文从控制系统转速外环控制器入手,用改进型模糊控制器代替传统固定参数的PI控制器,设计了模糊控制器输入和输出的隶属度函数,并且根据电机全速域运行电流、电压以及转速的关系设计了模糊规则,并且为了消除稳态误差,在系统中引入了积分控制环节。在此基础上,搭建了基于改进型模糊控制器的IPMSM全速域控制系统,进行了仿真研究,验证了所提控制策略的有效性和正确性。
1 IPMSM全速域控制策略
1.1 电机数学模型
为了简化分析,作如下假设:① 定子绕组感应电动势和转子气隙磁场分布均为正弦波;② 忽略定子铁心饱和、温度变化等影响;③ 不计涡流和磁滞损耗。所建立的内置式永磁同步电机d-q轴数学模型如下:

式中, ud, uq分别为定子电压的直轴和交轴分量; id, iq分别为定子电流的直轴和交轴分量; Rs为定子相电阻;Ld,Lq分别为直轴和交轴电感;p为极对数;ψf为永磁体磁链;ωr为机械角速度;Te为电磁转矩; TL为负载转矩;mB为静摩擦系数;J为转动惯量。
当IPMSM高速旋转时,由于定子相电阻 Rs上的压降较于电机反电势可忽略,忽略微分项,得到电机在全速域电压和电流限制为:

式中, Us为电机定子端电压合成矢量幅值; Usmax为系统输出最大电压; Is为电机定子电流合成矢量幅值; Ismax为电机额定电流。
电机全速域运行电压、电流轨迹如图1所示。
由图中可以看出,内置式永磁同步电机运行区域分为两个部分:① 恒转矩区,为了减小电机损耗,采用MTPA控制策略,即沿图中的OA段运行;② 恒功率区,为了进一步提高电机转速,拓宽电机运行范围,采用弱磁控制策略,即沿图中的恒转矩曲线和电压极限椭圆的交点运行。

图1 电机全速域运行电压、电流轨迹Fig.1 The Voltage and current trajectories of IPMSM at full speed range
1.2 恒转矩区电流控制策略
为了减小电机定子铜耗,满足电动汽车对驱动电机高效率、强动力性的要求,IPMSM在基速以下通常采用最大转矩电流比控制策略。由于具有凸极效应( Lq>Ld),在较高转速时,IPMSM磁阻转矩占有很大比重,所以要考虑磁阻转矩的影响。传统公式法得到的d、q轴电流关系为:

由于这种控制算法的计算量比较大,在实际控制系统中,对控制器的计算速度有较高要求,因此,在不影响控制精度的基础上对式(8)进行简化处理,利用泰勒级数将式(8)展开为:

代入实际电机参数通过计算可以得出,虽然qi的阶数在升高,但是其系数在减小,4阶及更高次项相比较于第一项较小,可以忽略不计。因此,简化后的MTPA算式可以写为:

1.3 恒功率区电流控制策略
当永磁同步电机的端电压达到逆变器能够输出的最大电压时,逆变器输出电压饱和,若不采取措施,逆变器实际输出电压将无法跟随系统电压指令,所以必须采取弱磁控制算法,才能继续升高电机转速。基速以下,电机将沿MTPA轨迹运行,基速以上,电机将不能再遵循MTPA轨迹,为了使电机的损耗最低化,电机运行点选取在电压极限椭圆上。恒功率区d、q轴电流关系为:

和恒转矩区一样,对式(11)进行简化处理,利用泰勒级数将式(11)展开为:

和恒转矩区一样,将4阶及更高次项忽略不计,简化后的弱磁区d、q轴电流关系可表示为:

2 基于改进型模糊控制器的系统全速域控制策略
在上述分析的基础上,本文提出了基于改进型模糊控制器的内置式永磁电机系统全速域控制策略,其系统控制框图如图2所示。

图2 系统全速域控制框图Fig.2 Control block diagram of the IPMSM system
由图中可以看出,所设计的改进型模糊控制器包含3个输入和2个输出,即输入包括电机转速偏差e、转速ωr、转速偏差变化率Δe,输出包括d、q轴电流参考值id*、 iq*,其内部原理如图3所示。当确定了电机恒转矩区和恒功率区的基本方程,就可以设计控制系统各个变量的隶属度函数和模糊规则。其中,量化因子( ke、 kω、 kΔe)和比例因子( kd、 kq)的选取原则是结合理论分析和仿真验证,通过反复试验法得到。
此外,为了消除传统模糊逻辑控制器的稳态误差,控制系统中引入了积分环节,即对转速误差的精确量进行积分控制,再与模糊控制器的输出变量叠加后构成总的输出变量,后续将对此做详细分析。
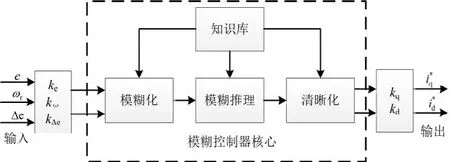
图3 模糊控制器控制框图Fig.3 Block diagram of the fuzzy controller
2.1 输入、输出隶属度函数
模糊控制器的输入包括电机转速偏差e,其模糊论域为[-1,1];电机转速ωr,其模糊论域为[0,3];电机转速偏差变化率Δe,其模糊论域为[-1,1];输出包括d轴、q轴参考电流id*、 iq*,其模糊论域均为[-1,1]。输入、输出的隶属度函数如图4所示。
2.2 模糊规则
当输入、输出的隶属度函数确定后,就可以根据恒转矩区和恒功率区的电流控制策略设计模糊规则。模糊控制器的模糊规则如下所示。
1)如果e为PH(正向大偏差),则 iq为PH(正向大输出);
2)如果e为PL(正向小偏差),则 iq为PL(正向小输出);
3)如果e为ZE(无偏差),则 iq为ZE(输出保持不变);
4)如果e为NL(负向小偏差),则 iq为NL(负向小输出);
5)如果e为NH(负向大偏差),则 iq为NH(负向大输出);
6)如果e为ZE(无偏差)且eΔ为PI(正向偏差),则iq为PL(正向小输出);
7)如果e为ZE(无偏差)且eΔ为NI(负向偏差),则iq为NL(负向小输出);
8)如果ωr为FW1(转速中输入),则iq为PL(正向小输出);
9)如果ωr为FW2(转速大输入),则iq为ZE(输出保持不变);

图4 模糊控制器输入、输出隶属度函数Fig.4 Input and output membership functions of the fuzzy controller
2.3 模糊逻辑控制器存在稳态误差原因分析
传统模糊控制器以误差和误差变化率为输入量,具有比例-微分控制作用,其中比例控制可以加快系统响应速度,减小系统稳态误差,提高控制精度;微分控制可以使系统超调量减小,稳定性增加,但是对干扰较敏感,会降低抑制干扰的能力。因此,传统模糊控制器仅有比例和微分的作用,缺少积分环节,从而存在消除系统误差性能欠佳的缺点,难以达到较高的控制精度。
偏差信号e的物理论域X=[ - a ,a],模糊论域为N={ - nj, - nj+1,…,-1,0,1,…, nj-1, nj},量化因子 k = nj/a ,把输入偏差清晰值e转换成离散论域N中的分档数时,在满足 | ke|<nj的条件下,n由取整公式可以得出,如下所示:

由式(14)可以看出,n等于ek的四舍五入取整值,其正负号与e的符号相同。如果位于平衡点附近,即当n=0(模糊值为0),并不等于输入偏差量e=0。此时,0=int(|ek|+0.5),可以得:

由式(15)可以看出,当取jn=7时,|e|=7 a%,只要输入偏差|e|小于最大偏差a的7%,模糊控制器就认为输入偏差e=0。所以,模糊控制器无法消除|e|<0.07 a时的稳态误差。
基于以上分析,传统模糊控制器存在固定的稳态误差,所以本文在设计模糊逻辑控制器的基础上引入积分环节,对输入转速误差的精确量进行积分,得到的积分量与模糊逻辑控制器的输出变量叠加后构成总的输出变量,从而消除了模糊控制的盲区,使控制系统具有了更高的稳态精度。
3 仿真结果分析
为了验证所提出的改进型模糊控制策略的有效性,本文在MATLAB/Simulink环境下搭建了内置式永磁同步电机全速域控制模型,其中IPMSM各项参数设置如表1所示。

表1 IPMSM参数Tab.1 IPMSM parameter
3.1 恒转矩区仿真分析
针对给定转速为3000r/min时系统空载(LT=0N⋅m)起动性能,本文对所提方法与传统PI控制策略、传统模糊控制策略进行了对比研究,如图5所示。
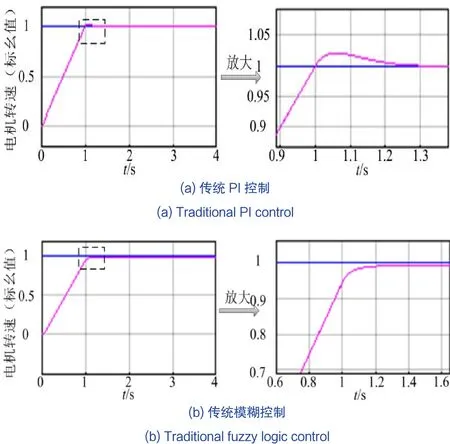

图5 给定转速为3000 r/min时系统空载起动转速波形Fig.5 No-load starting speed waveforms of the system with the given speed is set to 3000 r/min
从图5中可以看出,给定转速为3000 r/min时,传统PI控制空载起动时有较大的超调,且调节时间较长,传统模糊控制虽然无超调,但有稳态误差,而在本文控制策略下,系统空载起动无超调,且能快速准确地跟踪给定转速,调节时间短。
3.2 恒功率区仿真分析
针对给定转速为6000 r/min时系统空载(LT=0 N⋅m)起动性能,本文对所提方法与传统PI控制策略、传统模糊控制策略进行了对比研究,如图6所示。
从图6中可以看出,给定转速为6000 r/min时,传统PI控制空载起动时有较大的超调,且调节时间较长,传统模糊控制虽然无超调,但有稳态误差,而在本文控制策略下,系统空载起动无超调,且能快速准确地跟踪给定转速,调节时间短。
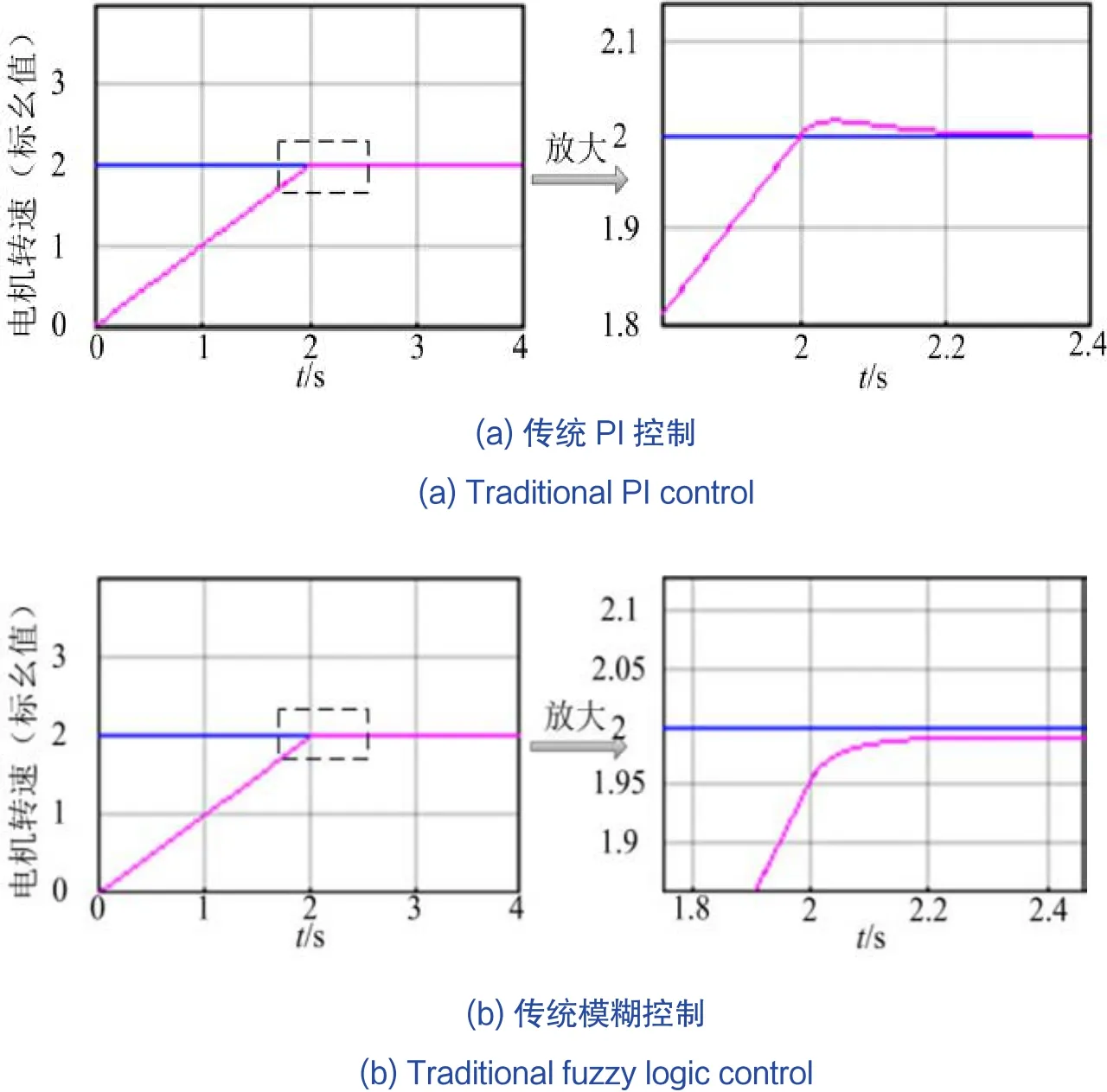

图6 给定转速为3000 r/min时系统空载起动转速波形Fig.6 No-load starting speed waveforms of the system with the given speed is set to 6000 r/min
3.3 全速域仿真分析
图7 是IPMSM在全速域内的转速和电磁转矩响应曲线,其中电机起动时给定转速为3000 r/min,当电机达到给定转速后,在2 s时突加负载扰动50 Nm,在3s时突减负载扰动50 Nm;在4s时加入转速扰动,转速指令为6000 r/min,达到指令转速后,在6 s时突加负载扰动20 Nm,在7 s时突减负载扰动20Nm。
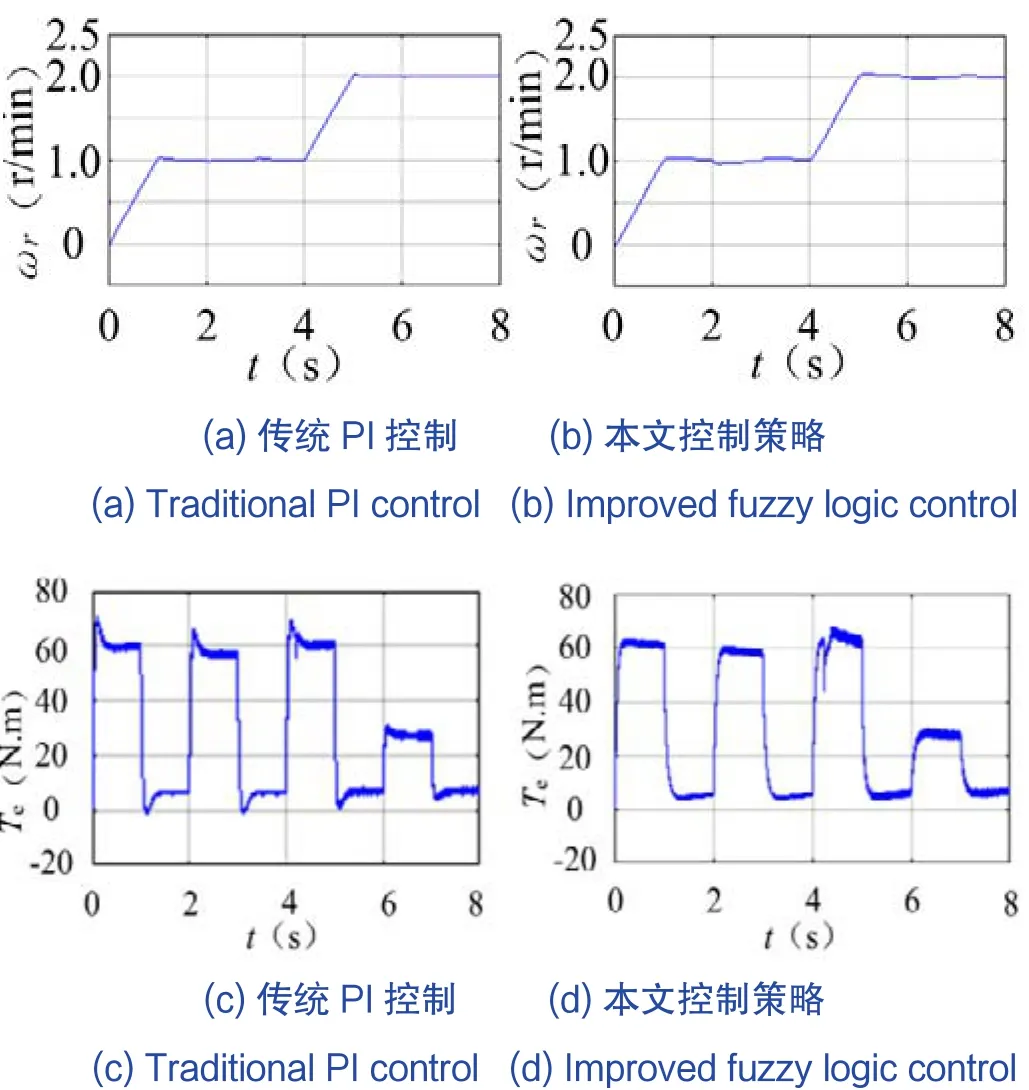
图7 全速域负载、转速扰动响应波形Fig.7 Speed and torque waveforms of IPMSM at full speed range
由图中对比结果可以看出,传统PI控制有较大超调,且调节时间长,而在本文控制策略下,系统空载起动无超调,且能快速准确地跟踪给定转速。在4 s时,电机由恒转矩区向恒功率区过渡,由于两个区域控制算法的差别,导致在切换时会有小幅度的转矩震荡。
综上,本文所提出的控制策略在全速域范围内对负载扰动和转速扰动具有较好的抗扰性能,仿真结果验证了所提策略的正确性和有效性。
4 结论
本文以内置式永磁同步电机为研究对象,提出了基于改进型模糊控制器的全速域控制策略,即首先制定了恒转矩区和恒功率区的电流控制策略,并在不影响控制性能的情况下对其进行了简化处理,提高了控制系统在实际运行时的速度;其次,针对转速外环设计了模糊控制器,包括输入、输出隶属度函数的设计和模糊规则的设计;最后,为了消除稳态误差,增强系统的快速性,在系统中引入积分环节。在此基础上,通过理论分析和仿真验证,得出如下结论:
1)所提出的改进型模糊控制策略对恒转矩区和恒功率区的电流控制策略进行了简化处理,并设计了隶属度函数和模糊规则。结果表明,所提控制策略具有速度响应快、系统效率高的优点。
2)针对传统模糊控制器存在稳态误差的问题,在模糊控制器中引入了积分环节。结果表明,所设计的积分环节可以进一步减小系统的稳态误差,提高了系统的快速性和抗干扰性能。
[1] 朱磊,温旭辉,赵峰,等.永磁同步电机弱磁失控机制及其应对策略研究[J].中国电机工程学报,2011,4(18): 67-72.ZHU Lei, WEN Xu-hui, ZHAO Feng, et al. Control Policies to Prevent PMSMs From Losing Control Under Field-weakening Operation [J] .Proceedings of the CSEE, 2011,4(18) : 67-72.
[2] 朱磊,温旭辉,薛山.车用永磁同步电机弱磁控制技术发展现状与趋势[C]//国际节能与新能源汽车创新发展论坛,2009,7(10):7.ZHU Lei, WEN Xu-hui, XUE Shan. Research Situation and Development Trend of Field-Weakening Control Technology for PMSM in Electrical Vehicle Application[C]//International energy conservation and new energy automotive innovation and Development Forum,2009,7(10):7.
[3] 陈强,吴根忠,叶雷.永磁同步电机变负载自适应神经网络控制[J].新型工业化,2014,4(4):17-22.CHEN Qiang, WU Gen-zhong, YE Lei. Adaptive Neural Control of Permanent Magnet Synchronous Motor with Variable Load [J] . The Journal of New Industrialization,2014,4(4) : 17-22.
[4] 解小刚,陈进.采用i_d=0的永磁同步电机矢量控制系统MATLAB/Simulink仿真[J].新型工业化,2016,6(5):47-54.XIE Xiao-gang, CHEN Jin. Vector Control With id=0 Simulation of PMSM Based on Matlab/Simulink[J] . The Journal of New Industrialization, 2016,6(5):47-54.
[5] SNEYERS B, NOVOTNY D W, LIPO T A. Field-weakening in buried permanent magnet ac motor drives[J].IEEE Transactions on Industry Applications,1985,21(2):398-407.
[6] JAHNS T M, KLIMAN G B, NEUMANN T W. Interior Permanent-Magnet Synchronous Motors for Adjustable-Speed Drives[J]. IEEE Transactions on Industry Applications, 2008,22(4):738-747.
[7] MORIMOTO S, TAKEDA Y, HIRASA T, et al. Expansion of operating limits for permanent magnet motor by current vector control considering inverter capacity[J]. IEEE Transactions on Industry Applications, 1990, 26(5):866-871.
[8] 盛义发,喻寿益,桂卫华,等.轨道车辆用永磁同步电机系统弱磁控制策略[J].中国电机工程学报,2010,30(9):74-79.SHENG Yi-fa, YU Shou-yi, GUI Wei-hua, et al. Field Weakening Operation Control Strategies of Permanent Magnet Synchronous Motor for Railway Vehicles [J] . Proceedings of the CSEE, 2010,30(9) : 74-79.
[9] RAHMAN M A, MILASI R M, LUCAS. Implementation of emotional controller for interior permanent magnet synchronous motor drive[J].IEEE Transactions on Industry Applications, 2008, 44(5):1466-1476.
[10] UDDIN M N, RAHMAN M A. High speed control of IPMSM drives using improved fuzzy logic algorithms[J]. IEEE Transactions on Industrial Electronics, 2007, 54(1):190-199.
[11] UDDIN M N, KHASTOO J. Fuzzy Logic-Based Efficiency Optimization and High Dynamic Performance of IPMSM Drive System in Both Transient and Steady-State Conditions[J]. IEEE Transactions on Industry Applications, 2014, 50(6):4251-4259.
[12] 吴荒原,王双红,辜承林,等.内置式永磁同步电机改进型模糊逻辑控制器设计[J]. 中国电机工程学报,2013,33(33):68-75.WU Huang-yuan, WANG Shuang-hong, GU Cheng-lin, et al. A Flux Weakening Control Scheme of IPMSM for Electric Vehicles Based on Improved Fuzzy Logic Controllers [J] . Proceedings of the CSEE, 2013,33(33) : 68-75.
[13] UDDIN M N, CHY M M I. A Novel Fuzzy-Logic-Controller-Based Torque and Flux Controls of IPM Synchronous Motor[J]. IEEE Transactions on Industry Applications, 2010, 46(3):1220-1229.
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
上海大中型电机(2021年2期)2021-07-21 03:01:32
煤气与热力(2021年4期)2021-06-09 06:16:54
防爆电机(2020年6期)2020-12-14 07:16:54
中华戏曲(2020年1期)2020-02-12 02:28:18
光学精密工程(2016年3期)2016-11-07 09:03:49
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29