基于随机载荷功率谱的电动拖拉机复合能量系统研究
2018-03-13 03:51刘孟楠周志立徐立友赵静慧
农业机械学报 2018年2期
刘孟楠 周志立 徐立友, 赵静慧 孟 涛
(1.西安理工大学机械与精密仪器工程学院, 西安 710048; 2.河南科技大学车辆与交通工程学院, 洛阳 471003;3.中国一拖集团有限公司, 洛阳 471039)
0 引言
拖拉机作业机组主要通过驱动入土部件进行土壤作业。土质不均匀、转向等因素导致的耕宽不稳定等会使耕作阻力产生波动。悬挂犁耕作业中的耕深调节、耕宽调整、偏牵引调整、正位调整等主动控制过程,会产生随机额外功率波动和行驶阻力波动。旋耕机组作业时的寄生功率会对拖拉机传动系统产生干扰[1-3]。文献[4]指出,当小功率拖拉机以正常速度作业时,单一农具产生的水平扰动力频率可达2 Hz,幅值可达2 kN。相较道路车辆,拖拉机进行农田作业时的载荷特性更为复杂,峰值功率和高频功率较多。因此,采用主要通过匹配最大功率和续航时间的传统后向型设计方法设计电动拖拉机能量系统,将无法满足拖拉机载荷波动特性,不能提供充足的峰值功率或高频功率,致使电动拖拉机的动力性降低。
采用基于复合电源的能量系统方案可以有效实现对负载功率需求的分流控制[5-6]。文献[7]对由燃料电池、蓄电池、超级电容器组成的电动汽车复合电源能量管理策略进行了研究,取得了较好的功率分流效果。文献[8]采用模糊控制器设计了纯电动汽车复合电源能量管理策略,仿真结果表明,模糊控制器在汽车起停阶段对超级电容器的利用效率较高。文献[9]采用燃料电池和蓄电池组成电动汽车复合电源,以蓄电池作为主能源,燃料电池作为增程器,通过样本训练神经网络的方法,有效解决了控制映射的非线性问题。上述研究在电动汽车复合电源功率分流方面取得了较好的研究成果。但是,由于其被控对象为道路车辆,载荷波动频率较低,载荷谱特性和拖拉机工况差异较大,无法直接用于电动拖拉机能量系统控制过程。文献[10-11]通过对动力电池组和柴油发电机组串、并联组成复合电源,提高了电动拖拉机续航里程;但是未对能量系统的频率控制开展研究,且其能量系统依然需要传统型能源,无法满足设施农业零排放的技术要求。
本文通过对电动拖拉机驱动系统功率流、载荷波动功率谱密度、电源放电特性等进行分析,基于犁耕、旋耕作业工况载荷特性研究电动拖拉机能量系统设计方法和控制策略,并开展模型在环测试。
1 电源方案分析
1.1 载荷功率谱描述
拖拉机农田作业时,驱动轮、动力输出轴(PTO)和提升臂处的势变量近似符合正偏态分布[12]。由于农田作业拖拉机驱动轮、PTO和提升臂处的流变量较为稳定,负载功率需求近似符合正偏态分布。将载荷分解为均值载荷h和以D为方差的波动载荷,为
μ(h,D)=h+μ(0,D)
(1)
由于拖拉机载荷波动具有随机性,需要通过自相关函数进行随机信号处理[13],为
(2)
式中R(τ)——自相关函数
ci——精度系数
n——组成项的总数
αi——衰减特性参数
βi——振荡特性参数
τ——信号间相对位移
根据狄利克雷-阿贝尔判别法可以证明R(τ)满足判定条件,通过Fourier变换计算拖拉机载荷波动功率谱函数为

(3)
对式(3)作标准单边化处理,为
(4)
式中G(ω)——自功率谱函数
G′(ω)——标准自功率谱函数
根据课题组前期研究成果[13-16], 将18.5 kW拖拉机田间试验所得ci、αi、βi代入G′(ω),以单峰函数(n=1)拟合拖拉机犁耕作业随机载荷功率谱,以多峰函数(n>1)拟合拖拉机旋耕作业随机载荷功率谱。计算可得文献[14]作业条件下,18.5 kW拖拉机犁耕作业时载荷波动的基频为0.5 Hz;截止频率超过12 Hz;最大谱密度出现在基频附近位置; PTO高挡旋耕作业时,基频为3 Hz;截止频率超过30 Hz;最大谱密度出现在基频附近位置。由于作业车速较为稳定,整体频宽较窄。
1.2 电源特性分析
相较Thrvenin、Rint等模型,采用PNGV模型建立蓄电池的等效电路模型能够较好反映蓄电池的频率特性[17]。为表征蓄电池的双层电容效应,采用PNGV模型对蓄电池建立等效模型,符合带通滤波电路特征。
蓄电池的双层电容效应导致高频电流不能流经电荷转移反应。根据文献[18],典型铅酸电池正、负极放电过程的截止频率分别为10、100 Hz。若采用蓄电池作为单一电源,将无法满足电动拖拉机作业时的高频功率需求。蓄电池长期高频放电,将大幅降低其放电效率,加剧动态温度上升,降低使用寿命。此外,由于铅酸、Ni-MH、Li-I等常用类型蓄电池的实际比功率通常较小,无法有效提供峰值功率需求,采用蓄电池作为单一能量系统,将难以实现功率突变时的功率补偿。超级电容器的比功率可达蓄电池的10~100倍, 能够达到3 kW/kg,;具有良好的暂态性能,可以对蓄电池大功率放电过程和高频放电过程进行功率补偿,平衡部分峰值功率和暂态功率,减少高频电流对蓄电池效率和寿命的影响。因此,采用蓄电池组和超级电容共同组成复合电源的能量系统方案。
2 复合电源方案设计
电动拖拉机能量系统方案如图1所示,包括动力电池组、超级电容、双向功率变换器和辅助电路模块。蓄电池和超级电容器通过双向DC-DC转换器并联组成复合电源;蓄电池组采用N串M并网络的方式组成动力电池组;超级电容器通过并联基于全互补射极跟随器,通过均压电路运算放大器A的开环增益,使超级电容间产生均压电压,实现串联超级电容器之间的动态均压效果。采用双向DC-DC转换器作为执行器,通过分别控制Mosfet栅极开关Q1、Q2、Q3、Q4的占空比,实现功率流方向控制。
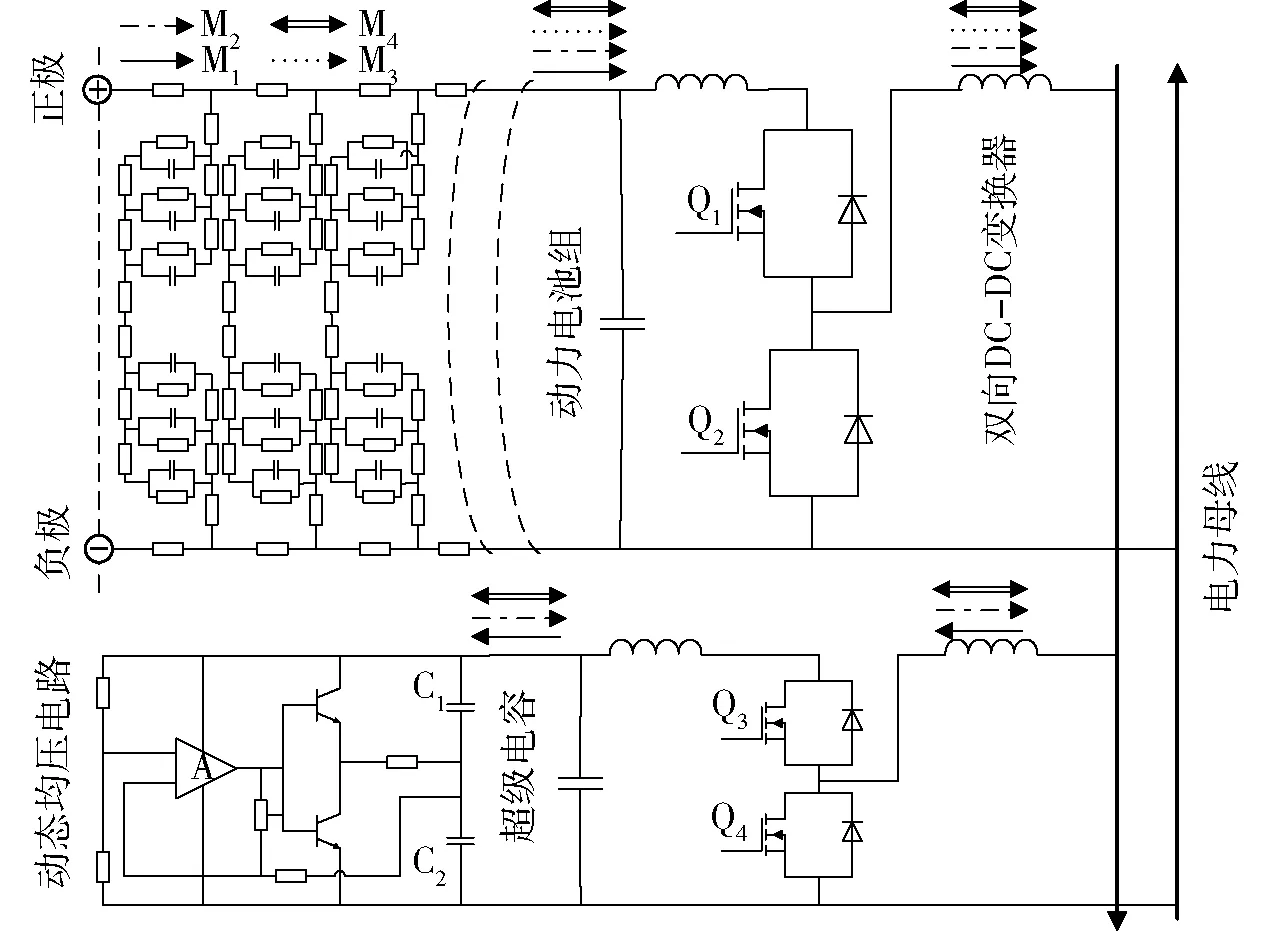
图1 电动拖拉机能量系统方案Fig.1 Power scheme of electric tractor
建立18.5 kW电动拖拉机续航时间约束、动力系统功率约束、最大使用重力约束、载荷稳态特性约束、载荷动态特性约束函数,结合产品型录,确定18.5 kW电动拖拉机能量系统参数如表1所示。
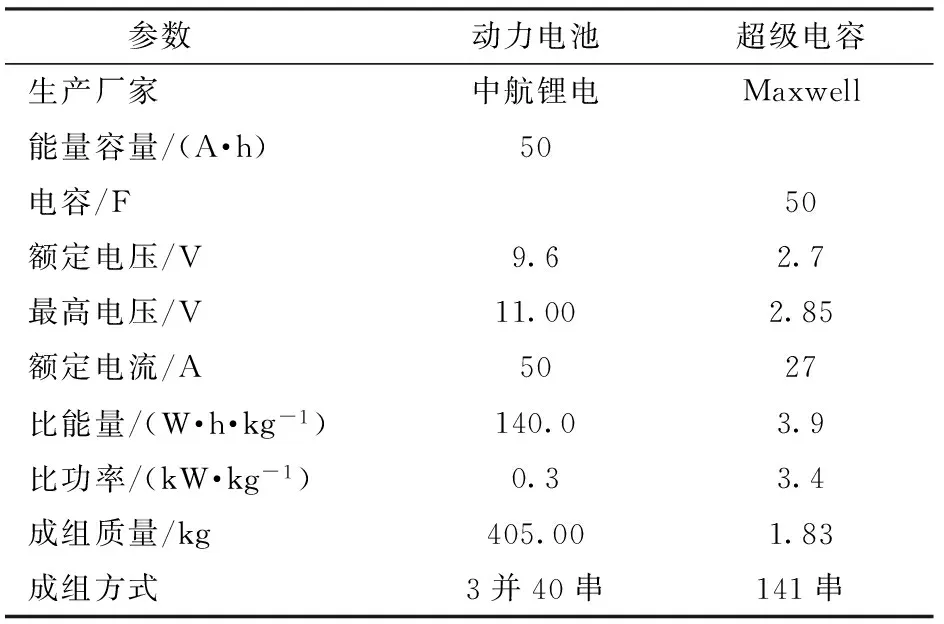
表1 电动拖拉机能量系统参数Tab.1 Parameters of electric tractor’s energy systems
根据拖拉机作业特点划分能量系统工作模式为:功率补偿模式(M1)、峰值放电模式(M2)、主电源供电模式(M3)和停车初始化模式(M4)。其中,功率补偿模式下,超级电容平衡动力电池组的过盈放电功率;峰值放电模式下,动力电池组和超级电容共同承担载荷所需的峰值功率;主电源供电模式下,动力电池组单独承担电动机所需的电功率;停车初始化模式下,通过和蓄电池间的电量交互,控制超级电容的SOC保持在初始值,从而保证下次启动时超级电容具备充足的功率缓冲能力。
采用逻辑算法实现电动拖拉机能量系统模式控制。设置控制参数: 驱动系统稳定功率需求为Pa;驱动系统总功率需求为Pb;超级电容器截止放电SOC为SSOCD;超级电容器初始SOC阈值为[SintD,SintU],其中SintD>SSOCD。
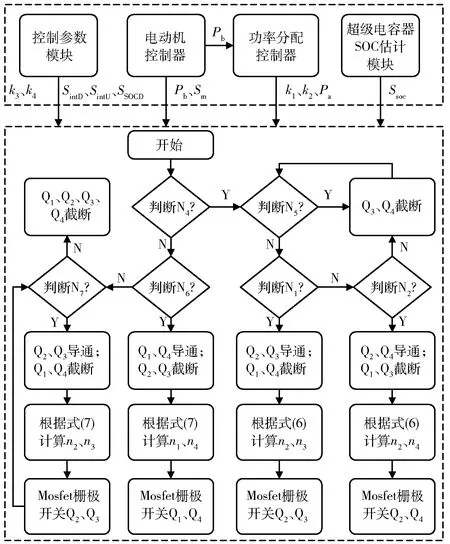
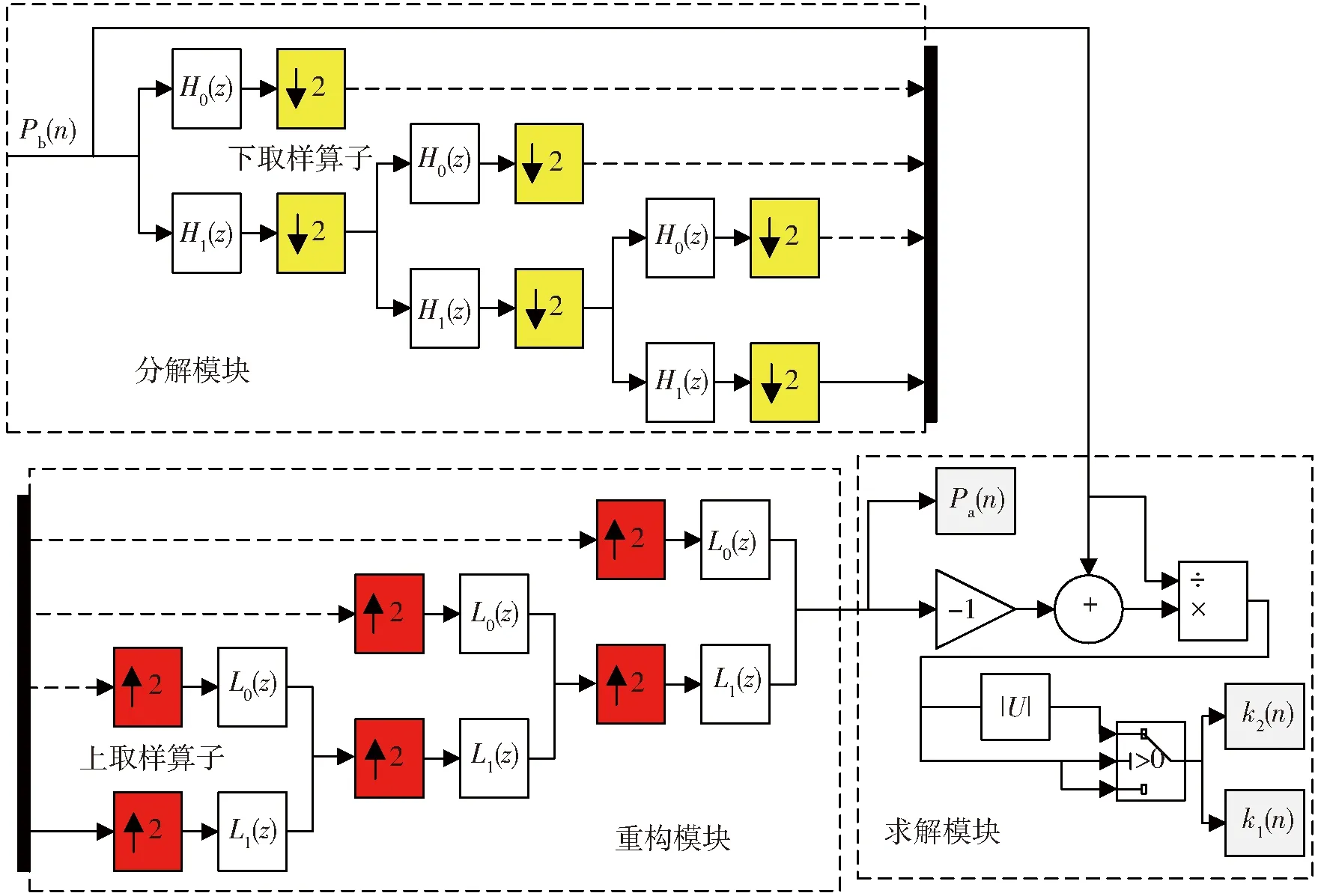
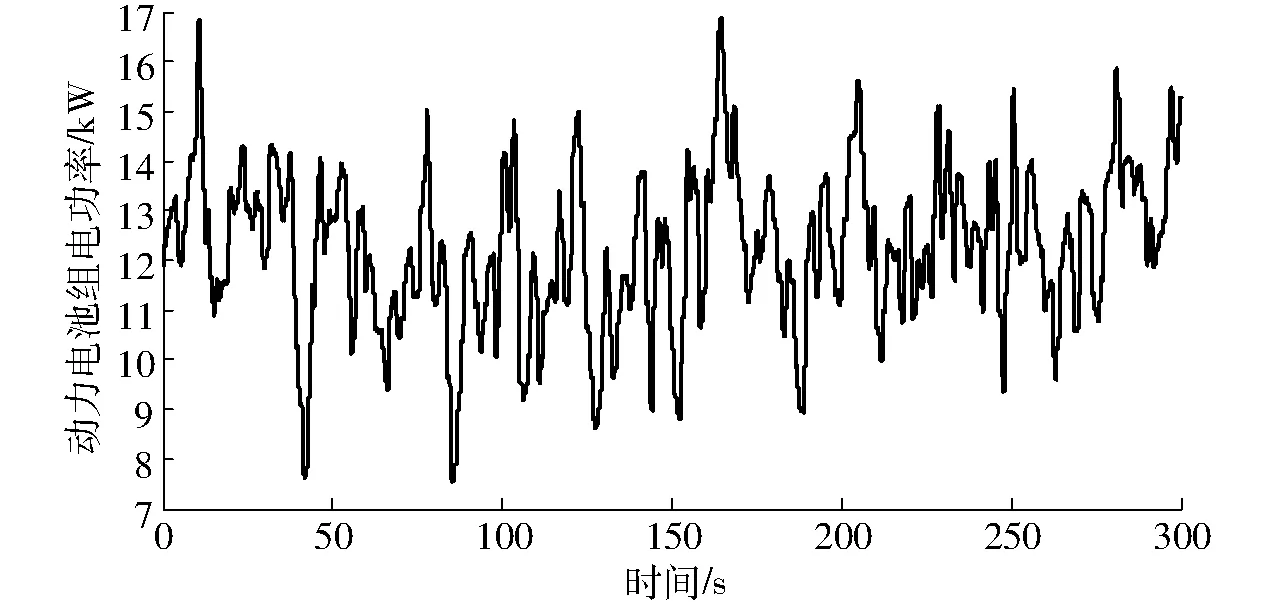
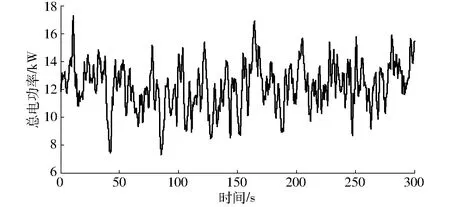
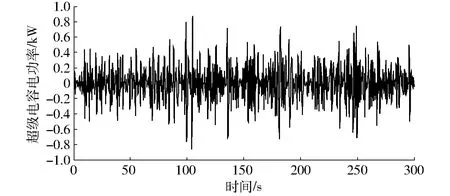
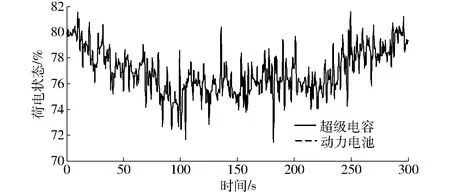
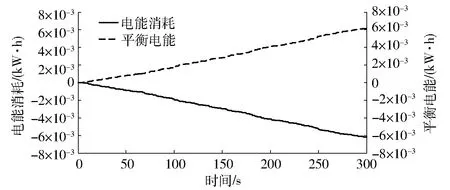
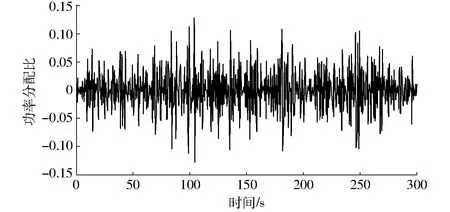
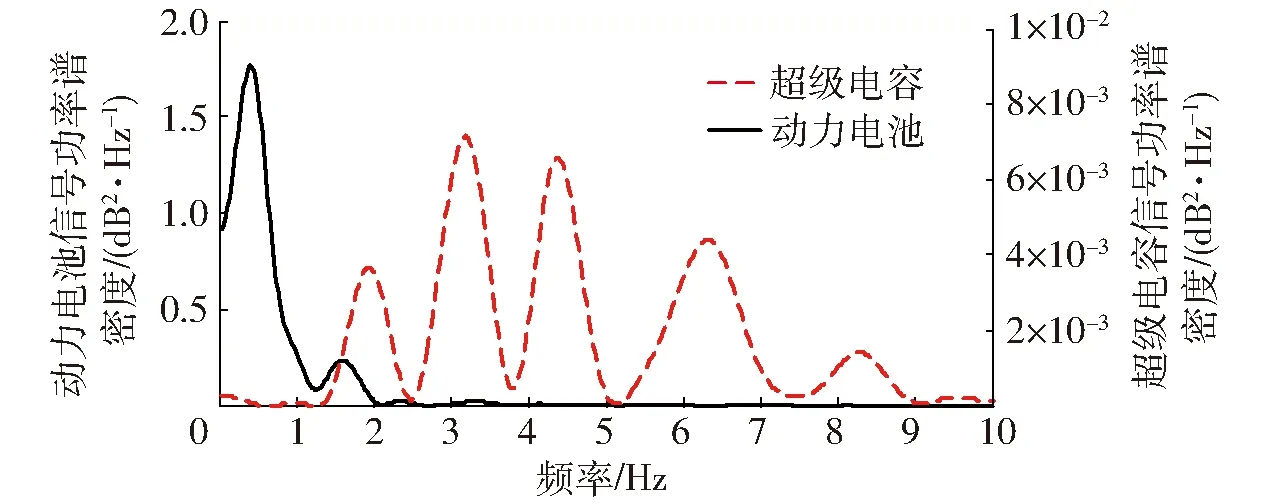
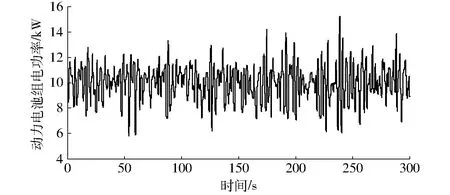
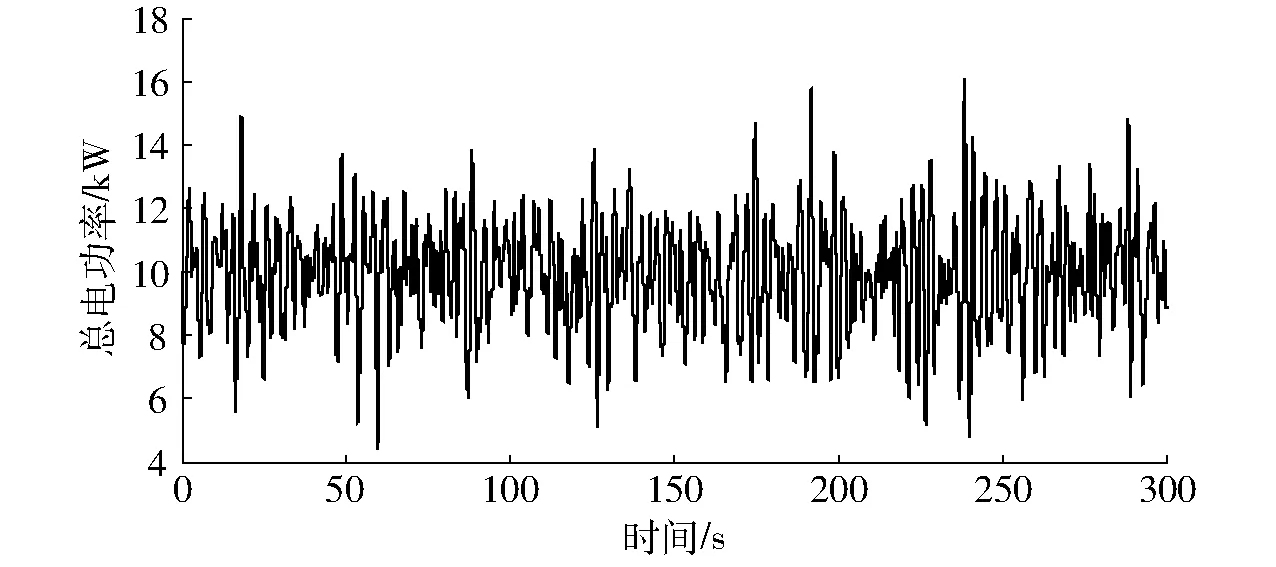
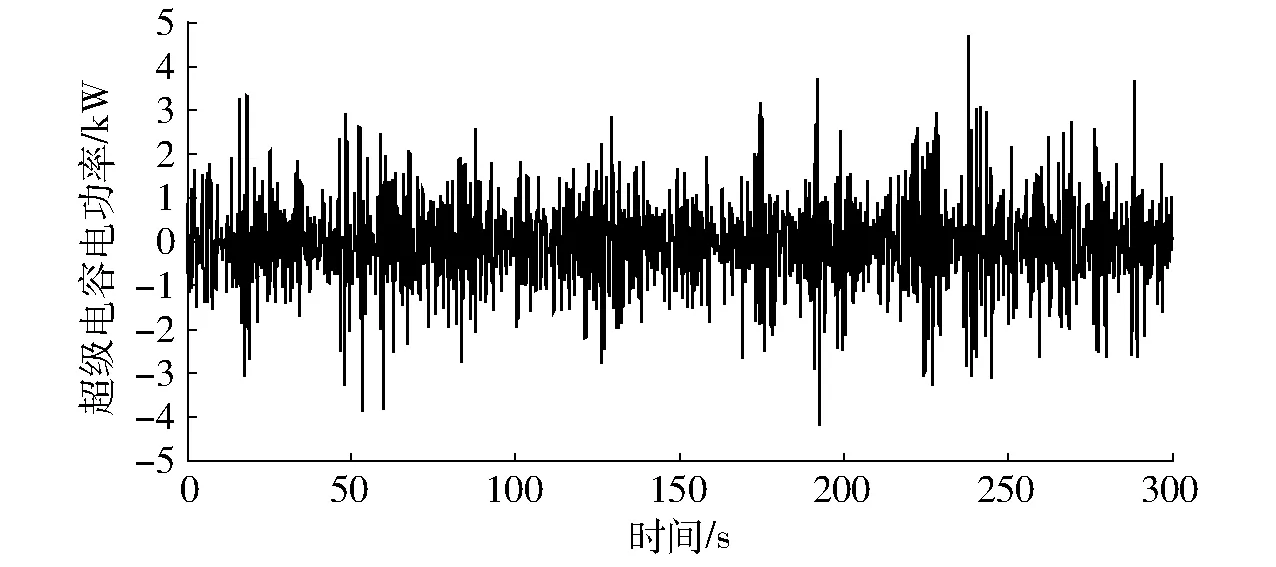
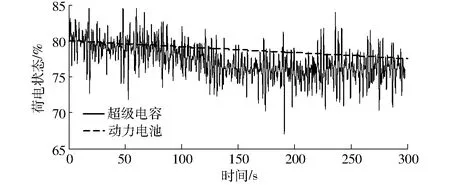
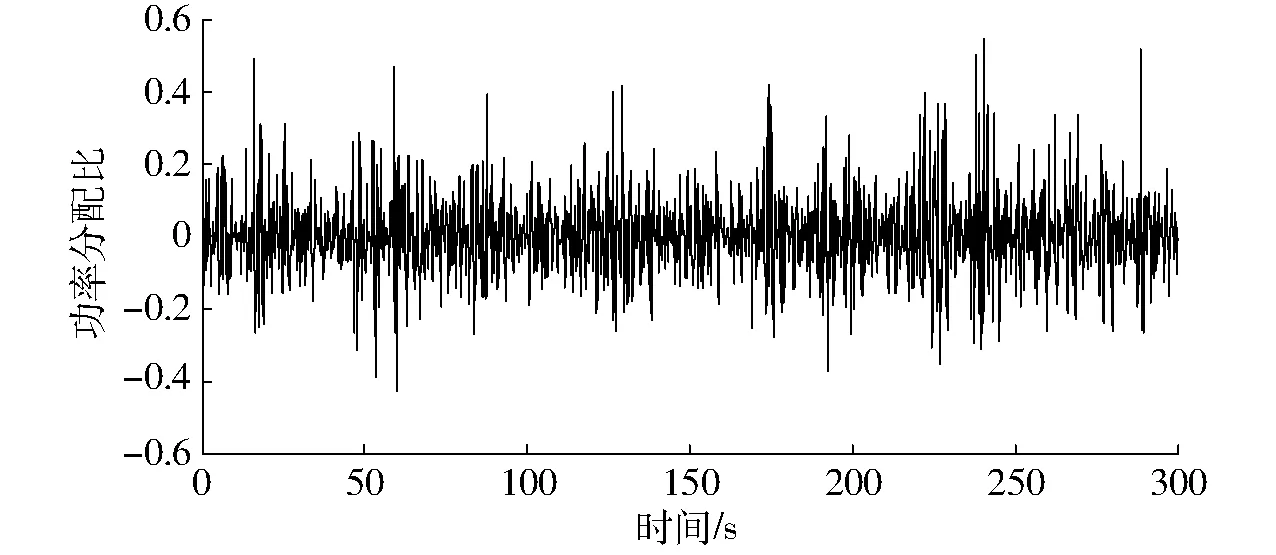
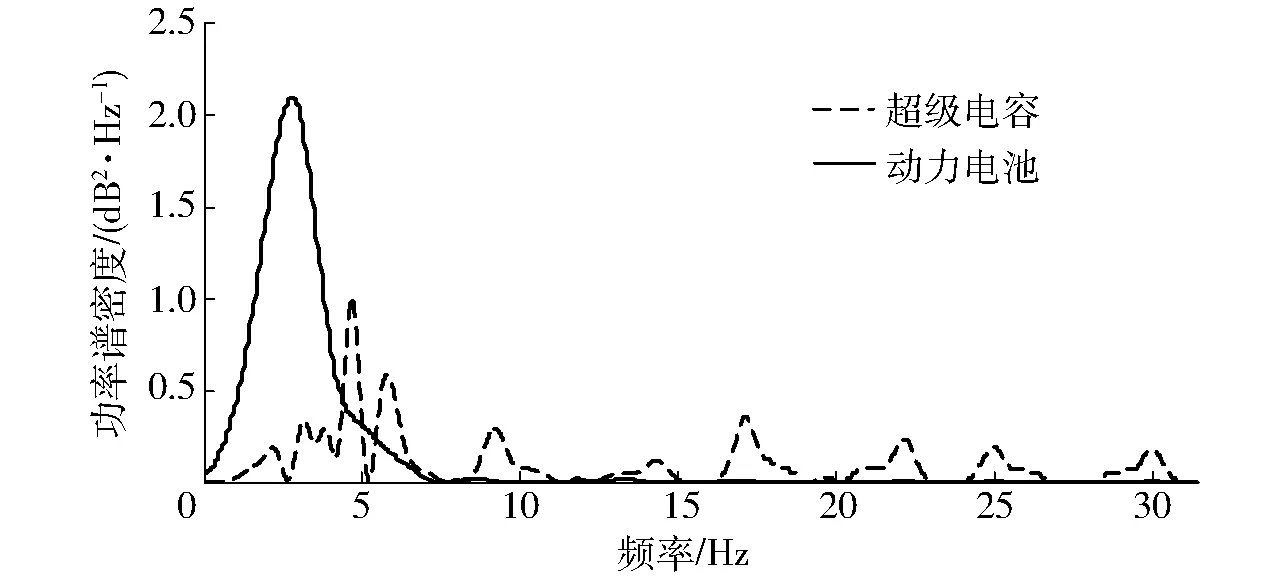
判断条件设置:“Pb>Pa”为N1; “Pb (5) 式中R——判断规则 定义复合电源功率分配比ki为超级电容器电功率和动力电池组电功率之比, 则4种作业模式下的ki为 (6) (7) 式中k1、k2、k3、k4——M1、M2、M3、M4模式下的功率分配比 n1、n2、n3、n4——栅极开关Q1、Q2、Q3、Q4导通状态下的占空比 K——与充电速率相关的常数 图2 电动拖拉机能量管理策略框图Fig.2 Control scheme of electric tractor energy systems 电动拖拉机复合电源能量管理策略如图2所示,从图2可以看出,控制器根据上层超级电容器SOC估计模块、电动机控制器、控制参数模块和功率分配控制器输出控制参数,根据式(5)的逻辑关系判断控制模式;通过改变双向DC-DC转换器的Mosfet栅极开关的导通状态,控制蓄电池和超级电容之间的电功率流。由超级电容器SOC估计模块输出超级电容器的SOC情况;由电动机控制器根据负载情况输出Pb和Sm;由功率分配控制器输出M1、M2模式所需的动态功率分配比k1、k2和稳定功率需求Pa;由控制参数模块输出M3、M4模式的静态功率分配比k3、k4和SSOCD、SintD、SintU等常量。根据式(6)、(7)调整Mosfet栅极开关占空比,实现动力电池组和超级电容之间的功率分配。 由图2可以看出,电动拖拉机能量管理策略对动力电池组和超级电容电功率的动态控制效果主要是由功率分配控制器对Mosfet栅极开关发出的控制信号决定的。根据作业模式功能需求和拖拉机载荷波动功率谱函数可知,功率分配控制器的主要作用是将载荷信号基频附近的稳定功率需求Pa和高频载荷的功率需求分别提取,计算动态功率分配比k1、k2。功率分配器需要同时具备一定的时间分辨率和频率分辨率。因此,功率分配控制器需具备对信号的时频分析功能和对实际物理量的滤波功能。 小波变换(Wavelet transform,WT)和窗口傅里叶变换(Short time Fourier transform,STFT)都具有对信号的时频分析功能。相比STFT,WT高频部分具有较高的时间分辨率,适用于对随机信号的分析[19]。此外,文献[20]通过对平稳正弦信号中加入阶跃信号后进行对照分析,验证了WT比STFT有更好的非稳定信号分析能力。因此,本文选择WT作为滤波工具。 小波变换分析效果主要由小波函数决定。相比其他小波函数,Haar小波具有最简单的形式和最短的滤波长度,其小波变换与反变换相等。选用Haar小波可以较大程度地降低功率分配控制器的分解运算复杂度,从而简化程序,提高代码执行率[21]。 本文设计基于Haar小波的双通道滤波器组,实现功率分配控制器对载荷功率信号的动态快速分解。 Haar小波尺度函数和小波函数正交,以尺度函数φ(n)作为父函数,小波函数φ(n)为母函数构造正交空间WJ和VJ,总功率需求PbJ(n)∈VJ-1,可以证明WJ-1是VJ-1对于VJ的正交补空间。因此,通过定义wJ-1(n)∈WJ-1,可以得到 (8) 令PbJ(n)=Pb0(n)+wJ′(n), 则载荷波动信号分解为稳定信号和细节信号,细节信号为 (9) 式中al、bl、l——离散化后的尺度因子和平移因子 J——信号分解层数 图3 功率分配控制算法框图Fig.3 Algorithm scheme of power distribution 根据18.5 kW拖拉机负载功率谱密度,定义滤波过程的上限频率为所属作业模式载荷波动基频+1 Hz。犁耕作业下,设计滤波器分解并重构至第1层,保留J′≤1,J∈Z+部分的细节信号;旋耕作业下,分解并重构至第3层,保留J′≤3部分的细节信号;即按照拖拉机载荷波动功率谱特性对电动机功率需求Pb进行分解。基本信号和细节信号通过上取样和重构滤波器,得到稳定功率需求Pa,即可实现对总功率需求的分解。 基于Haar小波双通道正交滤波器组的电动拖拉机动态功率分配算法如图3所示。通过阶梯函数对载荷波动信号Pb(t)进行相似离散化,得到离散化信号Pbj(n)。 图3中对应旋耕作业时采用的3阶分解重构算法,包含分解模块、重构模块和求解模块。PbJ(n)经由高通离散滤波器H0(z)和低通离散滤波器H1(z)分解为基本信号和细节信号,经过降幅为2的下取样过程,通过修改小波系数对信号进行滤波后,通过滤波器L0(z)和L1(z)对滤波信号进行重构,输出Pa(n)。并根据求解模块得到动态功率分配比k1、k2。根据式(8)和Haar小波函数,设计滤波器组为 (10) 式中b1~b8——滤波器状态参数 基于课题组前期开发的电动拖拉机机组仿真平台[22],采用CRUISE/Simulink API联合仿真的方法建立18.5 kW电动拖拉机牵引犁耕和旋耕机组能量管理控制算法模型在环仿真平台,测试控制行为。 建立电动拖拉机仿真工况时,需要同时对流变量特性和势变量特性进行定义。由于犁耕作业和旋耕作业属于拖拉机重载作业模式, 作业速度通常较为稳定,因此分别定义犁耕机组和旋耕机组的仿真流变量为车速和PTO转速,分别取18.5 kW拖拉机进行犁耕作业和旋耕作业时的推荐作业速度和PTO高挡转速。则犁耕作业流变量取5.5 km/h,旋耕作业流变量取2.4 km/h和1 050 r/min。 根据式(1)~(4),通过对以u(h,D)分布的正态分布白噪声整形的方法,得出符合18.5 kW拖拉机犁耕作业和旋耕作业载荷波动功率谱的随机载荷。 根据线性系统理论,正态分布平稳过程通过线性系统后,输出仍为正态分布过程,滤波整形过程为 G(ω)=|H(ω)|2U(ω) (11) 式中H(ω)——整形器频率响应函数 U(ω)——符合拖拉机随机载荷率密度分布的白噪声信号功率谱函数 以0为均值,D为方差的标准正态分布白噪声为基波,U(ω)为D。根据式(1), 将符合u(h,D)的正态分布白噪声信号分解为均值载荷和基波的线性叠加,由谱分解定理,可得u(0,D)整形器的传递函数为 (12) 式中H(s)——整形器传递函数 首先通过randn函数生成u(0,D)的正态分布白噪声,并根据整形器对其频率响应特性进行整形滤波,然后和均值载荷进行线性叠加,可得符合拖拉机载荷波动功率谱的随机载荷信号模块。 采用基于车速控制的驾驶员模型,设定动力电池组和超级电容器的初始SOC为80%,滚动阻力系数为0.1,环境温度为15℃,坡度为0%,无风。 对于单独采用蓄电池作为能量系统的电动拖拉机,忽略DC-DC转换器处能量损失,可以认为其蓄电池用于作业的功率等于电动机总功率。因此,采集电动机总功率特征,同时进行横向和纵向对照分析。 电动拖拉机犁耕作业过程中的动力电池组电功率消耗情况如图4所示,从图4可以看出,循环工况内,动力电池处于放电阶段,最大输出电功率为16.8 kW,最小输出电功率为7.5 kW;动力电池波动符合正偏态分布特征,均值为12.13 kW,方差为2.44 kW2。 图4 犁耕作业动力电池组电功率情况Fig.4 Electric power of batteries with plowing 电动机总电功率消耗情况如图5所示,最大电功率为17.3 kW,最小电功率为7.3 kW;其概率密度符合正偏态分布,均值12.25 kW,方差2.66 kW2。对比可知,作业过程中,动力电池组最大电功率比最大总电功率下降0.5 kW,动力电池组最小电功率比最小总电功率大0.2 kW。控制策略的功率分配控制器对于动力电池组具有一定的峰值功率抑制作用。 图5 犁耕作业电动机总电功率情况Fig.5 Total electric power of electric motor with plowing 犁耕循环工况,电动拖拉机能量系统超级电容器的电力特性如图6~8所示。由图6可以看出,超级电容器主要承担了电动机功率总需求中的高频部分。循环工况中,其电功率均值为0.004 kW,方差为0.06 kW2,近似符合标准正态分布。 图6 犁耕作业超级电容电功率情况Fig.6 Electric power of super capacitors with plowing 图7 犁耕作业能量系统SOC情况Fig.7 SOC characteristic of energy system with plowing 犁耕作业过程电动拖拉机能量系统动力电池组和超级电容的SOC情况如图7所示。从图7可看出,整个过程中,二者初始SOC均为80%,动力电池组SOC下降速率较为稳定,超级电容器处于动态充放电状态下。循环结束时,动力电池组SOC为77.11%,超级电容器SOC为79.3%。动力电池组放电率范围为0.12~0.30 C,放电率均值为0.20 C,属于小电流放电,可忽略温度变化对于电能损失的影响,根据Peukert方程估算其最大续航时间为3.35 h,满足设计指标对续航性能要求。 犁耕作业过程电动拖拉机能量系统超级电容器电能消耗情况如图8所示,从图8可看出,循环时间内,由于控制策略的功率平衡作用和犁耕作业载荷波动截止频率较低以及高频载荷的功率谱密度较低的特征,导致超级电容电能消耗和平衡电能基本相等。 图8 犁耕作业超级电容电能消耗情况Fig.8 Energy output of super capacitors with plowing 犁耕作业工况循环内ki的变化情况如图9所示,从中可以看出,由于基于Haar小波的双通道滤波器同时具有一定的时间分辨率和频率分辨率,基于功率分流控制策略的电动拖拉机能量系统ki与随载荷波动间存在正比关系,满足控制需要。不通过双向DC-DC转换器,直接并联蓄电池和超级电容的能量方案,其超级电容器同样具有平衡高频电功率的功能,但是其ki不可控,无法有效发挥超级电容的功率平衡作用。 图9 犁耕作业过程功率分配比Fig.9 Power distribution coefficient in plowing 动力电池组和超级电容功率控制信号功率谱密度情况如图10所示。可以看出,经过能量管理策略的功率分配作用,动力电池组的截止频率在2 Hz附近,承担了能量系统主要的低频功率输出;超级电容器功率信号的功率谱密度较小,承担了系统主要的高频功率输出。 图10 犁耕作业能量系统载荷信号功率谱密度Fig.10 Power spectral density of energy system in plowing 旋耕作业工况下动力电池组电功率情况如图11所示,动力电池组最大电功率输出为15.2 kW,最小电功率输出为5.7 kW;概率密度符合正偏态分布,均值为9.92 kW,方差为1.89 kW2。电动机电功率消耗情况如图12所示,最大功率输出为16.11 kW,最小功率输出为4.83 kW;概率密度符合正偏态分布,均值为9.91 kW, 方差为2.83 kW2。 图11 旋耕作业动力电池组电功率情况Fig.11 Electric power of batteries with rotary tillage 图12 旋耕作业电动机总电功率情况Fig.12 Total electric power of electric motor with rotary tillage 对比犁耕作业可知,由于旋耕作业载荷波动截止频率较高,采用基于Haar小波的3阶双通道滤波器组的功率分配策略对于动力电池组抑制峰值功率的效果更加明显。 旋耕作业工况下超级电容器电功率情况如图13所示,循环工况内,超级电容器最大放电功率为4.73 kW,最小放电功率为4.14 kW;其中放电功率均值为0.005 6 kW,方差为0.77 kW2,可认为超级电容器电功率概率密度近似符合标准正态分布。 图13 旋耕作业超级电容电功率情况Fig.13 Electric power of super capacitors with rotary tillage 旋耕作业能量系统SOC情况如图14所示。从中可以看出,动力电池组始终处于放电状态,其SOC下降至77.54%;超级电容器处于动态充放电状态,虽然超级电容器电功率均值近似为0,但是其充放电过程存在一定的能量耗散,超级电容器SOC下降至75.29%。 图14 旋耕作业能量系统SOC情况Fig.14 SOC characteristic of energy system with rotary tillage 旋耕作业工况内ki的变化情况如图15所示。对比图9可知,由于旋耕工况负载波动频率较高,因此,旋耕工况内ki的频率较高。 图15 旋耕作业过程功率分配比Fig.15 Power distribution coefficient in rotary tillage 旋耕作业能量系统载荷信号功率谱密度如图16所示。由于能量管理策略对功率需求信号的分流作用,动力电池组承担电动机功率需求中的低频分量;超级电容器承担其中的高频分量。动力电池组端功率信号截止频率为7 Hz,小于动力电池组放电截止频率,满足控制要求。整个能量系统功率控制信号的最大谱密度在基频(3 Hz)附近,符合 PTO高挡作业转矩功率谱密度特征。 图16 旋耕作业能量系统载荷信号功率谱密度Fig.16 Power spectral density of energy system in rotary tillage 对比犁耕作业工况和旋耕作业工况下的电力特征可知。采用动力电池组和超级电容器组成的复合电源能量系统方案,能够有效解决单一电源类型无法满足拖拉机载荷频率特性的问题。电动拖拉机能量系统参数设计能够满足续航性、峰值载荷、拖拉机使用性能等要求。能量管理策略能够对总功率需求进行分流,对于犁耕作业工况,由于载荷特性截止频率较低,因此高频信号分流幅值较低;对于旋耕作业工况,由于载荷波动频率较高,其高频信号分流功率谱密度较高,ki最大值可达0.51,采用基于Haar小波的双通道三阶滤波器组作为功率分配控制器时的控制效果较为明显。 (1) 分析了拖拉机工况的载荷功率谱密度和动力电池放电特性,论证了单一能量系统无法较好满足拖拉机工况时频特性,设计了基于超级电容并联动力电池组的电动拖拉机能量系统方案,计算了系统参数。 (2) 针对系统方案设计了基于模式控制的电动拖拉机能量管理策略,采用Haar小波设计了基于双通道滤波器组的功率分配控制算法。 (3) 开展了模型在环测试,结果表明:犁耕作业和旋耕作业下,复合电源能够有效解决单一能量系统高频放电问题,能量管理策略可使动力电池组提供基频附近的功率需求,超级电容器提供高频信号,实现对峰值功率的分配。 1 谢斌,张超,陈硕,等.双轮驱动电动拖拉机传动性能研究[J/OL]. 农业机械学报,2015,46(6):8-13. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150602&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.06.002. XIE Bin, ZHANG Chao, CHEN Shuo, et al. Transmission performance of two-wheel drive electric tractor[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(6): 8-13.(in Chinese) 2 DAVIES D B, FINNEY J B, RICHARDSON S J. Relative effects of tractor weight and wheel-slip in causing soil compaction[J]. Journal of Soil Science, 1973, 24(3): 399-409. 3 WONG J Y. Terramechanics and off-road vehicle engineering: terrain behaviour, off-road vehicle performance and design[M]. 2nd ed. Oxford: Elsevier Ltd,2010: 129-149. 4 陈秉聪, 秦维谦, 张兰义,等. 农具机组负载模拟器[J]. 吉林工业大学学报, 1991(4): 34-40. CHEN Bingcong, QIN Weiqian, ZHANG Lanyi, et al. Load simulator of tractor-implement combination[J]. Journal of Jilin University of Technology, 1991(4): 34-40. (in Chinese) 5 葛智元, 周立新, 赵巍,等. 超级电容器与蓄电池并联混合电源放电特性[J]. 电源技术, 2014,38(5): 886-913. GE Zhiyuan, ZHOU Lixin, ZHAO Wei, et al. Discharging performance of hybrid power of supercapacitor in parallel with lead acid battery[J]. Chinese Journal of Power Sources, 2014,38(5): 886-913. (in Chinese) 6 SIKHA G, NPOPOV B. Performance optimization of a battery-capacitor hybrid system[J]. Journal of Power Sources, 2004, 134(1): 130-138. 7 ZHANG X, MI C, MASRUR A, et al. Wavelet-transform-based power management of hybrid vehicles with multiple on-board energy sources including fuel cell, battery and ultracapacitor[J]. Journal of Power Sources, 2008, 185(2): 1533-1543. 8 石庆升, 张承慧, 崔纳新. 新型双能量源纯电动汽车能量管理问题的优化控制[J]. 电工技术学报, 2008, 23(8): 137-142. SHI Qingsheng, ZHANG Chenghui, CUI Naxin. Optimal control of energy management in novel electric vehicle with dual-source energy storage system[J]. Transactions of China Electrotechnical Society, 2008, 23(8): 137-142. (in Chinese) 9 胡瑾瑜, 宋珂, 章桐. 基于神经网络的增程式电动汽车能量管理策略研究[J]. 佳木斯大学学报:自然科学版, 2011, 29(6): 829-832. HU Jinyu, SONG Ke, ZHANG Tong. Study on the energy management policy of extended-range electric vehicle based on neutral network[J]. Journal of Jiamusi University:Natural Science Edition, 2011, 29(6): 829-832. (in Chinese) 10 FLORENTSEV S, IZOSIMOV D, MAKAROV L, et al. Complete traction electric equipment sets of electro-mechanical drive trains for tractors[C]∥Proceedings of 2010 IEEE Region 8 International Conference on Computational Technologies in Electrical and Electronics Engineering, 2010: 611-616. 11 CARLINI M, ABENAVOLI R I, KORMANSKI H, et al. A hybrid electric propulsion system for a forest vehicle[C]∥Proceedings of the 32nd Intersociety Energy Conversion Engineering Conference 1997, 1997: 2019-2023. 12 冯锡曙, 郑松林, 李国英,等. 拖拉机载荷二维概率分布模型及其工程应用[J]. 拖拉机,1992(3): 10-24. FENG Xishu, ZHENG Songlin, LI Guoying, et al. The two-dimension model and application of load probability distribution of tractor[J]. Tractor, 1992(3): 10-24. (in Chinese) 13 方在华, 周志立, 杨铁皂,等. 拖拉机随机载荷的功率谱函数[J]. 洛阳工学院学报, 1999, 20(4): 1-4. FANG Zaihua, ZHOU Zhili, YANG Tiezao, et al. The power spectral function of the random loads in tractor[J]. Journal of Luoyang Institute of Technology, 1999, 20(4): 1-4. (in Chinese) 14 赵波, 牛毅, 周志立,等. 拖拉机旋耕机组载荷随机特性的实验[J]. 洛阳工学院学报, 1995, 16(1): 69-74. ZHAO Bo, NIU Yi, ZHOU Zhili, et al. Experiment on the statistical characteristic of loads for rotocultivator and tractor unit[J]. Journal of Luoyang Institute of Technology, 1995, 16(1): 69-74. (in Chinese) 15 方在华, 周志立, 杨铁皂,等. 犁耕和旋耕作业发动机载荷的统计特性[J]. 农业工程学报, 2000, 16(4): 85-87. FANG Zaihua, ZHOU Zhili, YANG Tiezao, et al. Statistical properties of working load of engine in plowing and rototilling[J]. Transactions of CSAE, 2000, 16(4): 85-87. (in Chinese) 16 方在华, 周志立, 杨铁皂,等. 正态随机载荷的计算机仿真[J]. 洛阳工学院学报, 2000, 21(1): 1-3. FANG Zaihua, ZHOU Zhili, YANG Tiezao, et al. Computer simulation for normal random load[J]. Journal of Luoyang Institute of Technology, 2000, 21(1): 1-3. (in Chinese) 17 韩智强, 姜久春, 孙丙香,等. 锂离子动力电池电路模型的频率特性分析[J]. 电源技术, 2015, 39(2): 268-272. HAN Zhiqiang, QIN Jiuchun, SUN Bingxiang, et al. Frequency characteristics analysis of lithium-ion power battery circuit model[J]. Chinese Journal of Power Sources, 2015, 39(2): 268-272. (in Chinese) 18 JOSSEN A. Fundamentals of battery dynamics[J]. Journal of Power Sources, 2006, 154(2): 530-538. 19 BOGGESS A, NARCOWICH F J. A first course in wavelets with Fourier analysis[M]. 2nd ed.New York: John Wiley & Sons, 2010: 121-207. 20 章步云, 周书民. 非平稳信号的快速傅里叶变换与小波分析的比较[J]. 通信技术, 2002(7): 1-2. ZHANG Buyun, ZHOU Shumin. The difference of between analyzing by fast Fourier translation and analyzing by wavelet[J]. Communications Technology, 2002(7): 1-2. (in Chinese) 21 ZHANG X, MI C. Vehicle power management: modelling, control and optimization[M]. London: Spring, 2011: 124-126. 22 刘孟楠,徐立友,周志立,等. 增程式电动拖拉机及其旋耕机组仿真平台开发[J]. 中国机械工程,2016,27(3):413-419. LIU Mengnan,XU Liyou,ZHOU Zhili,et al. Establishment of extended range electric tractor and its rotary cultivator’s simulative platforms[J]. China Mechanical Engineering,2016,27(3):413-419. (in Chinese)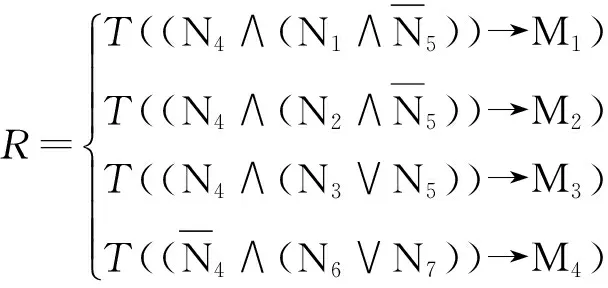
3 功率分配控制算法推导
3.1 小波选择
3.2 基于Haar小波的双通道正交滤波器组设计

4 控制模型在环测试
4.1 随机载荷模块建立

4.2 犁耕作业工况测试
4.3 旋耕作业工况测试
5 结论
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
中学生数理化·中考版(2022年4期)2022-04-26
中学生数理化·中考版(2020年12期)2021-01-18
中学生数理化·中考版(2020年12期)2021-01-18
物理之友(2020年12期)2020-07-16
电子制作(2019年22期)2020-01-14
新高考·高一物理(2017年7期)2018-03-06
消费导刊(2017年19期)2017-12-13
电子制作(2017年7期)2017-06-05
中学生数理化·高二版(2016年10期)2016-12-24