旱地回转扎穴式播种器设计与试验
2018-03-13 01:58:15李沐桐李天宇官晓东赵广阔周福君
农业机械学报 2018年2期
李沐桐 李天宇 官晓东 赵广阔 周福君
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
近年来,保护性耕作在中国得到了广泛推广,扎穴免耕播种技术也是实施保护性耕作重点内容之一,其有着播种均匀性高、株距稳定、投种点低、可膜上作业的显著优点,但机具阻力过大、单体作业方式复杂、关键部件堵塞壅土等问题制约着扎穴播种技术的进一步发展[1-2]。李复辉等[3]针对种子排播过程中碰撞随机性较大的问题,研制了内嵌勺盘式舵轮免耕施肥播种机,解决了播种均匀性差的问题;戴飞等[4]针对膜上作业过程穴播机构水平分速度不一致导致的撕膜问题,研究设计了近等速机构的全膜双垄沟直插式电动穴播机;奚如如等[5]应用新的鸭嘴开启机构,将气吸排种原理与舵轮穴播技术相结合,简单、有效地实现了入土成穴。然而,在该领域的研究中针对堵塞、壅土问题解决方式与结构创新较少,且由鸭嘴实现排播的传统作业方式粒距变异系数的改善上仍有待提高。所以,扎穴部件的创新和可靠性研究已成为提高穴播机具作业质量的重要手段。
为进一步提高播种均匀性并解决扎穴排播过程中的壅土堵塞现象,需实现充种、扎穴排种和清堵组合动作构成的一体化穴播作业方式,由于传统的机械式排种器动力学建模分析方法不能详细地设计和分析这种组合机构,因此,对于新型播种器的原创设计和研究是解决以上问题的关键。
本文结合东北地区精播农艺要求,设计一种旱地回转扎穴式播种器,其主要由偏心凹轮、 回位压簧和扎穴活塞等关键部件组成,其核心部件工作机理及其运动规律是评价可靠性的关键,需基于严谨理论分析和仿真计算,对关键部件进行优化设计和材料选定,并结合不同条件的试验检测其整体性能与适用性,本机构旨在以小体积、高灵活性的特点适用于覆膜穴播、平播、垄作等各种地块的不同作业方式。
1 机构组成与工作原理
1.1 机构组成
偏心凹轮式扎穴播种单体如图1、2所示,主要由扎穴臂外壳、型孔凹轮、扎穴活塞、压簧、清种毛刷、防卡片和摆杆装配构成,在扎穴臂外壳内设有存种腔、活塞腔和排种腔,在壳体的壁部上开设防卡片安装槽口,在所述型孔凹轮上设置渐变式型孔、防卡种环槽、非圆凹面滑道与动力轴连接孔,摆杆的两端分别铰连在扎穴臂外壳和安装架固定轴上,固装在安装架上的主轴插配在型孔凹轮上的动力轴连接孔内;本机构单体采用主轴偏心方式驱动型孔凹轮转动,从而带动机构整体运动,集成取种与扎穴排种匹配联动于一体机构,完成扎穴与排种同步连续作业。
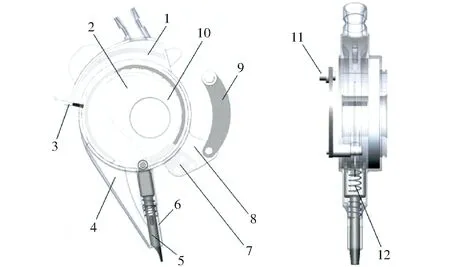
图1 偏心凹轮式扎穴排种机构三维模型示意图Fig.1 Schematic diagram of three dimensional model of off-centre pin hole metering mechanism1.存种腔 2.主轴 3.清种毛刷 4.排种腔 5.扎穴活塞 6.活塞腔 7.防卡片 8.扎穴臂外壳 9.摆杆 10.型孔凹轮 11.安装架固定轴 12.压簧
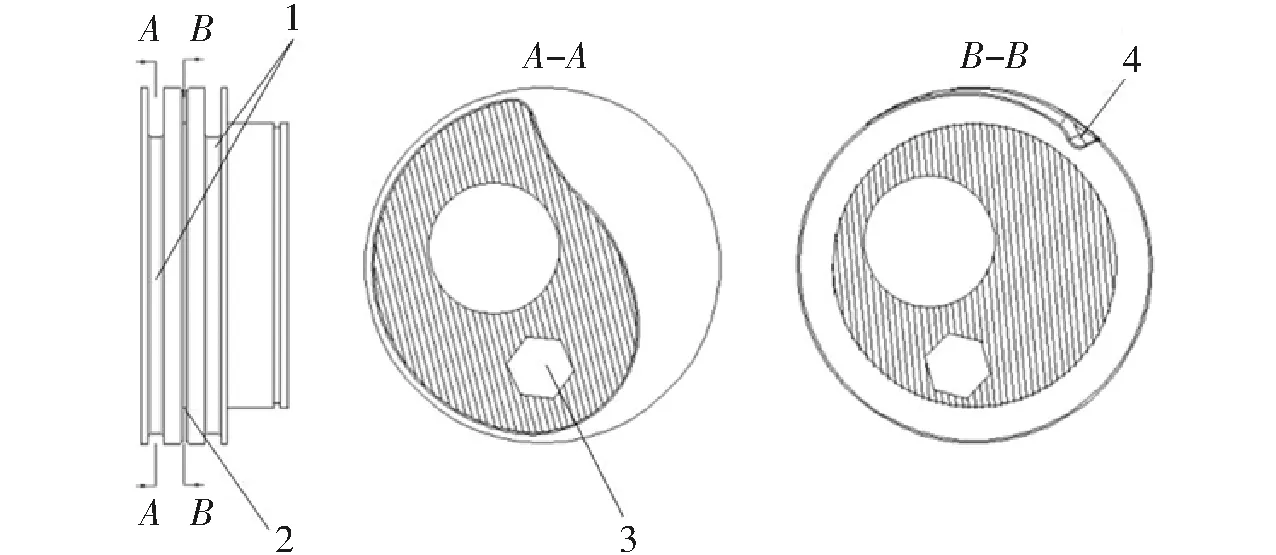
图2 型孔凹轮组合剖视图Fig.2 Off-centre concave wheel cutaway view1.非圆凹面滑道 2.防卡种环槽 3.动力轴连接孔 4.渐变式型孔
1.2 工作原理
作业时,型孔凹轮上的动力输出连接孔作为动力输入端,在转动的主轴驱动下实现型孔凹轮偏心转动,其中,型孔凹轮内设有非圆凹面滑道,扎穴臂外壳内的活塞腔配装压簧,两者组合驱动末端配装轴承的扎穴活塞在扎穴臂外壳中的活塞腔内做直线往复运动;同时,型孔凹轮带动扎穴臂外壳做往复回转摆动;当型孔凹轮上的渐变式型孔转至存种腔区域内时,预存在存种腔内的种粒在重力作用下落入渐变式型孔内部,此时,如渐变式型孔内充入多余种粒,固装在充种区域末端的清种毛刷将多余的种粒刷回至存种腔内,完成精量取种过程;当扎穴臂外壳上与已充入种子的型孔凹轮转动至近地位置时,渐变式型孔将种粒甩至扎穴臂外壳内的排种腔,扎穴活塞由非圆凹面滑道作用下从活塞腔内伸出,扎入土壤内成穴口;当扎穴活塞由处于压缩状态的压簧的作用力向上运动时,种粒从扎穴臂外壳的排种腔内甩出至活塞腔内,经活塞腔下端的连通口排种到穴口内;此刻,如种粒滞留在渐变式型孔内,防卡片反作用力将种粒从渐变式型孔内顶出至排种腔内,从而完成取种、成穴、排种连续运动[6-7],其单体实物如图3所示。

图3 单体实物图Fig.3 Mechanism monomer physical photo
2 关键部件结构设计
2.1 扎穴原理及数学模型的建立
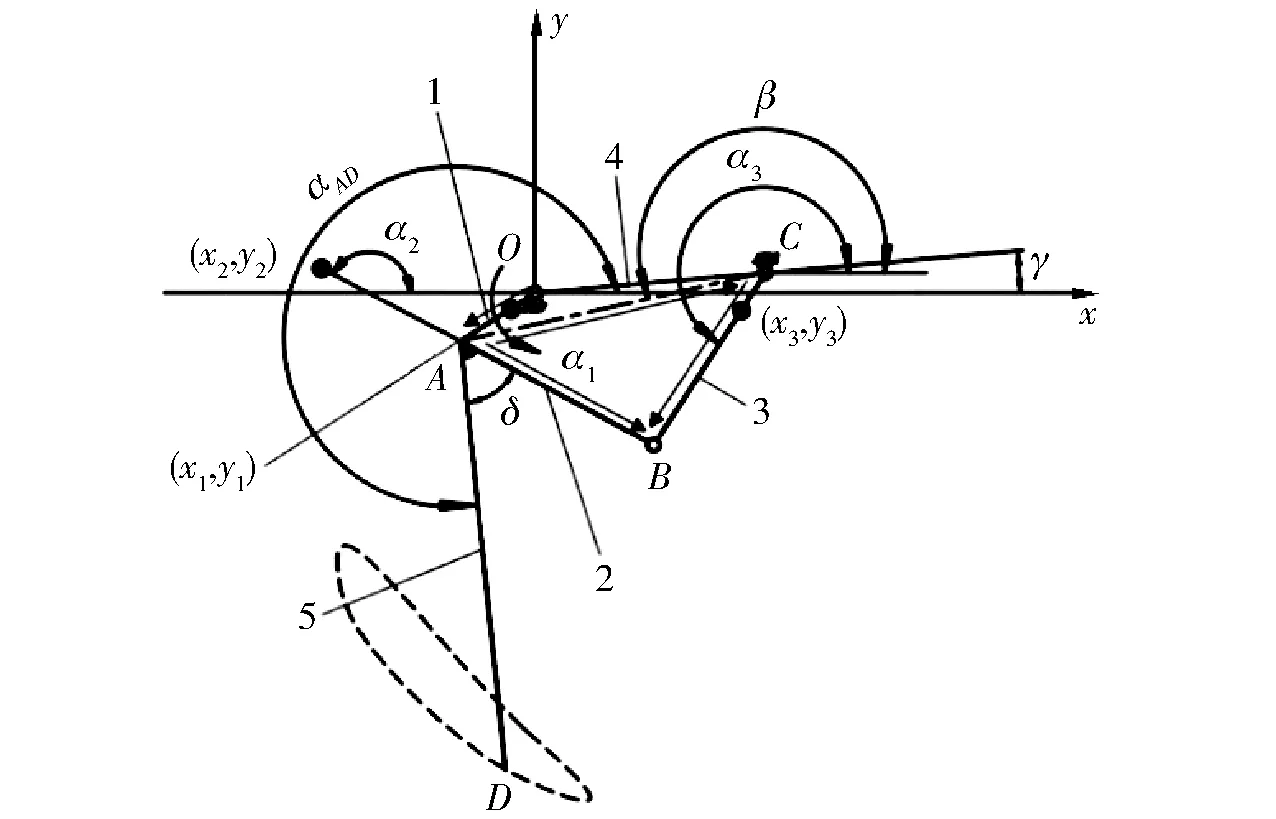
图4 运动数学模型Fig.4 Mathematical model of motion1.摇臂 2.连接柄 3.摆杆 4.固定梁 5.扎穴臂
如图4所示,机构主要由摇臂、扎穴臂、连接柄、摆杆构成,其中,O点为摇臂回转中心点并与机架主传动同轴配装,C点为摆杆末端与机架铰接点,OC距离为L4,与水平面夹角为γ,摇臂与连接柄夹角为δ并共同与摇臂铰接于A点,连接柄与摆杆铰接于B点,D点为入土点尖端。当扎穴机构作业时,摇臂绕O点作圆周运动,带动扎穴臂进行周期性摆动,进而引起扎穴臂尖端运行轨迹的变化。通过参数调整,获得满足扎穴排种机构工作要求的绝对运动轨迹,以实现扎穴尖端出土返回轨迹与扎穴入土轨迹夹角在0~10°范围内,从而减少土壤带回现象。
建立机构的矢量方程
lOA+lOB=lOC+lCB
转换为解析形式可表示为
(1)
(2)
式中L1——连接柄OA长度, mm
L2——连接柄AB长度,mm
L3——摆杆BC长度, mm
α1——摇臂OA转过的角度,(°)
α2——连接柄AB与x轴夹角,(°)
α3——摆杆BC与水平线夹角,(°)
设AC连线与x轴夹角为β,则
(3)
将式(2)、(3)简化后得
(4)
因α3-β为△ABC的内角,故α3-β在0~π之间, 由此可求得α3。
OA杆质心坐标为
(5)
AB杆质心坐标为
(6)
(7)
BC杆质心坐标为
(8)
式中L1O——OA质心到O距离,mm
L2A——AB质心到A距离,mm
L3C——BC质心到C距离,mm
则扎穴尖端D点的相对运动位移为
(9)
式中LAD——扎穴臂AD长度,mm
αAD——扎穴臂AD与x轴夹角,(°)
扎穴尖端D点的绝对运动位移为
(10)
式中H——玉米株距,mm
假设扎穴机构水平前进速度v1=0,则扎穴尖端D点的相对速度方程为
(11)
当扎穴机构水平前进速度v1≠0,则扎穴尖端D点的相对速度方程为
(12)
2.2 联动参数确定
将上述数学模型转换为C语言并运用VB软件编写程序对扎穴机构各结构参数进行优化选定[8]。通过scale法进行坐标变换,将坐标变换成直角坐标以方便模型的编程实现。程序主要优化扎穴机构的各结构参数。参数设置界面放置在右侧,可方便直接调试各参数值,在主界面观测扎穴臂尖端各种运行轨迹并分析数据的可靠性。
为达到扎穴入土流畅、不带土、不扬土,扎穴尖端的运动轨迹应满足[9]:①土壤扰动(穴口)最小,尖端入土轨迹与出土轨迹夹角小于10°。②轨迹穴口在12~20 mm范围内。③扎穴入土深度30~50 mm。④穴距范围200~300 mm。为提高扎穴质量并改善机构的动力学特性,设定目标优化参数L1、L2、L3、L4、L5、γ、δ等。通过调整参数值,动态调整主界面扎穴臂尖端运动轨迹,采用定位实时坐标方法选取满足上述条件的最优轨迹,如图5所示。优化后参数值为:L1=50 mm、L2=135 mm、L3=120 mm、L4=130 mm、L5=220 mm、γ=5°、δ=55°。测得优化结果下扎穴尖端入土时与水平面夹角约为76°,扎穴臂入土深度为44.6 mm,穴口纵向长度13.8 mm,穴距为245 mm,尖端轨迹呈前倾状,满足设计要求。
图6 凹轮滑道与扎穴活塞运动分解图Fig.6 Diagrams of non circular concave wheel slide and pricking hole of piston motion
图5 绝对运动轨迹图Fig.5 Absolute motion locus of pricking mechanism
2.3 凹轮滑道的设计
凹轮滑道与压簧组合控制扎穴活塞在扎穴臂外壳的活塞腔内进行轴向往复运动,其非圆轨滑道轮廓直接影响种粒排播是否顺利,图6为扎穴活塞运动过程中的3种连续状态,凹轮廓线主要参数由δ0、δ′0、δ和r0组成,如图6a所示。
对于扎穴排播动作而言,若提前完成扎穴活塞的向上回位动作,易导致扎穴动作失效,即进行扎压土壤前,扎穴活塞尖端已开始向上回位,并未形成穴口;相反,若活塞回位动作滞后,可能造成种粒未能及时排出,增加了重播率。由此可见,为得到凹轮轮廓线曲线轨迹,需针对扎穴机构内部的活塞与种粒运动状态进行分析。
首先对于目标种粒进行运动分析,种粒从型孔中沿切向以一定初速度甩入排种腔内,以种粒重心O为原点,建立直角坐标系Oxy,如图6b所示,种粒由型孔以切线速度v0运动到连通口处所需时间为t,则在此时间内种粒下落竖直位移为
(13)
其中
v0=ωDm/2
式中S——投种点与活塞腔连通口垂直高度,取160 mm
Δδ——扎穴运动角,(°)
由于渐变式型孔曲率过大不利于种粒充填,一般型孔轮直径在80~200 mm,结合前期设计确定的扎穴联动机构参数,选取凹轮设计大端面直径Dm=175 mm,其型孔具体内部结构参数本文不做详细说明。
对于扎穴活塞的动力学分析相对复杂,假设整个过程中回位压簧复位时间无损耗,按活塞运动先后顺序可分为扎穴—回位—二次扎穴三步连贯动作。首先设定活塞由垂直伸长(种粒脱出瞬时)状态至收缩回位状态所需时间为t′,则
(14)
若要保证种粒排出后顺利通过连通口,需满足活塞回位时间小于种粒下落到底端连通口的时间,即
T=t′-t≤0
(15)
为得到凹轮轮廓线曲线轨迹,设定坐标系的y轴与扎穴活塞轴线重合,建立Oxy坐标系,B0点为凹轮推程廓线的起始点。开始时扎穴活塞尾部轴承中心处于B0点处,当凹轮转过θ角时,扎穴活塞产生相应的位移Δs,此时轴承中心处于B点,如图7所示。
其直角坐标为
(16)
式中r0——理论基圆半径,mm
式(16)为凹轮理论轮廓线方程式。因为工作廓线与理论廓线在法线方向的距离应等于轴承半径rr,故当已知理论廓线上任意一点B(x,y)时,只需沿理论廓线法线方向取距离为rr,即得凹轮工作廓线对应点B′(x′,y′)的坐标为
(17)
此式即为凹轮的工作廓线轨迹方程式。
由于在凹轮机构中,过小的回程运动角δ′0会增大凹轮轮廓线的压力角,即增加了机构受力并降低了动作灵活性,为减小扎穴活塞尾部轴承与凹轮内壁的刚性冲击,根据前期设计确定的扎穴联动机构参数并结合上述条件,初步设定活塞尖端伸长量s0为22 mm,基圆半径r0设定为72 mm,休止角δ为192°、推程运动角δ0为138°、回程运动角δ′0为30°。
2.4 入土性能分析
由于扎穴过程中内部活塞处于相对静止状态,且套配在活塞外壁上的回位压簧处于压缩状态,因此在扎穴入土时,活塞末端对土壤的瞬时冲击力主要由机构的工作转速决定,需基于上述所确定的凹轮参数,计算扎穴机构的最大极限回转角速度。本文通过Matlab软件绘制出式(15)中时间差T与转速的关系来选取工作转速,其变化规律如图8所示。
图8 回转角速度对T的影响曲线Fig.8 Influence curve of rotary angular velocity on T value
由图8可看出,时间差T随回转角速度的增加而逐渐减小,在区间2~6 rad/s内,T均小于1 s,当角速度约为6.3 rad/s时,T降低至0,此时籽粒已不能顺利排出,因此,为便于试验研究,本文取最大回转角速度为6 rad/s,转换成转速为57.3 r/min。在上述前提下,运用多体动力学仿真软件ADAMS对扎穴连动机构进行扎穴动作模拟,假设土壤表面为规则水平面,其活塞尖端与扎穴臂外壳末端绝对轨迹如图9所示,而后对活塞尖端建立标记点,生成其速度变化曲线,如图10所示。
图9 ADAMS动力学虚拟仿真过程Fig.9 Virtual simulation process of ADAMS dynamics
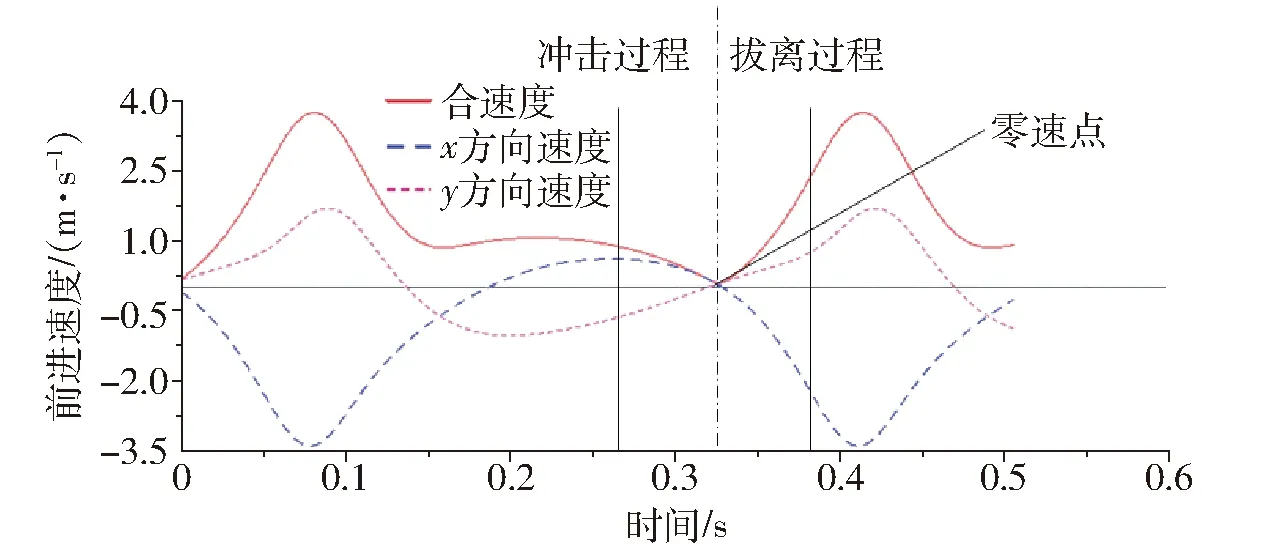
图10 扎穴活塞尖端速度变化曲线Fig.10 Velocity variation curves of piston
结合图9、10分析可知,扎穴动作可分解为冲击过程与拔离过程,其中冲击过程为决定扎穴入土性能的关键,基于上述分析,可计算活塞尖端扎穴过程的瞬时冲击应力为
(18)
式中σt——活塞对土壤瞬时冲击应力,Pa
m——整体连动机构质量,约4.2 kg
Δv——活塞尖端入土过程合速度变化量,由图9可知,约为0.9 m/s
Ap——活塞尖端与土壤表面接触面积,取πd2/4,约为0.000 1 m2(忽略活塞尖端形状以保守计算)
Δt——冲击过程作用时间,由图10可知约为0.04 s(对应回转角速度为2 rad/s,转速为19.1 r/min)
通过采集东北不同地域土质数据[10-14],设定土壤坚实度参考范围为0.103~0.487 MPa(深度0~10 mm),对式(18)保守计算可得σtmin为0.945 MPa,综上可知,在转速为19.1~57.3 r/min范围内,瞬时扎穴冲击应力最低值大于东北地区土壤坚实度最大值,理论上可顺利实现扎穴入土排播作业。
2.5 回位压簧的设计
通过2.3节理论分析可知,回位压簧在压缩与复位过程中必然存在时间延迟,且不同规格压簧对活塞尾部的回位压力不同,其压力直接影响种粒在扎穴动作后的排播质量,因此,需要在前期确定的结构尺寸基础上进一步选择弹簧的具体参数。对回位动作可分解为2步,如图11所示,按其动作先后从右至左表示,图中虚线部分为壳体固定端面,与压簧下端保持压缩常接触状态,此时长度为H1;当活塞处于即将收缩回位瞬间,活塞尾部轴承进入凹轮回程区域,此时弹簧释放弹性势能,当活塞收缩到最小极限位置时,弹簧长度为H2。
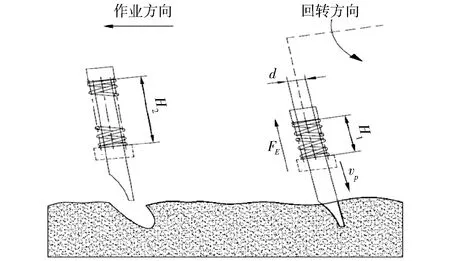
图11 活塞回位过程分解图Fig.11 Pistion resolution chart of return process
根据前期设计的结构尺寸(活塞腔体管壁直径20 mm、活塞长度168 mm、活塞直径17 mm)及已确定的运动行程,弹簧中径d选取为18.5 mm、H1取50 mm、H2取92 mm,回位过程对活塞尾部的恢复力可表示为[15]
FE=9.8K(H2-H1)
(19)
其中
式中FE——弹簧对活塞尾部的恢复压力,N
K——弹力系数,N/mm
G——弹簧材料刚性模数,本文选用普通弹簧钢SUP,8 000 kg/mm2
ds——弹簧线径,mm
d——弹簧中径,mm
N——弹簧有效圈数,平端面弹簧为总圈数减2,匝
对活塞材料,本文选取高锰耐磨钢ZGMn13,密度为7 870~7 980 kg/m3,其有其他耐磨材料无法比拟的加工硬化特性,在较大冲击或较大接触应力的作用下,高锰钢板表层产生加工硬化,表面硬度由HB200迅速提升到HB500以上,从而产生高耐磨的表面层,而钢板内层奥氏体仍保持良好的冲击韧性。
依据上述条件,需选取最佳恢复力以确定弹簧相关参数范围,由于回位过程中,弹簧需克服活塞重力使其复位,故需满足
FE>mpg
(20)
将式(19)代入式(20),并以恢复力FE为目标函数,弹簧线径ds与有效圈数N为未知变量,通过ORIGIN绘制出FE与mpg的差值变化规律,如图12所示。
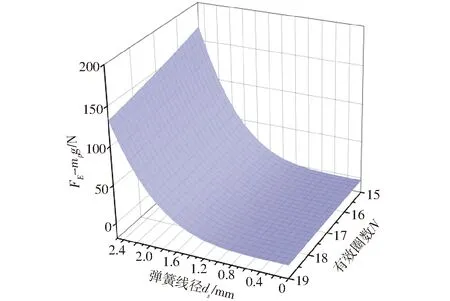
图12 弹簧线径及圈数对恢复力的影响曲面Fig.12 Influence surface of spring wire diameter and circle number on restoring force
对于回位压簧而言,由于外壳长度的限制,其圈数不宜过大,而过小有效圈数和过大的线径会造成巨大的恢复力,将导致机构工作中活塞尾部轴承对凹轮的冲击与震动加剧,因此,为便于加工装配,本文选取有效圈数为18匝。从图12中可知,在弹簧线径小于0.8 mm时,差值小于零,即此时恢复力不足以克服活塞重力;而线径大于1.8 mm时,恢复力增长较大,且均大于30 N(机构单体重力约42 N)。为保证活塞的及时回位,并考虑零件震动与冲击问题,本文设定弹簧线径范围为1.0~1.8 mm。其具体取值还需根据特定作业条件的实际测试来确定。
3 土槽试验
3.1 试验因素与指标的选取
由上述理论分析可知,机构转速和回位压簧线径直接影响着入土性能和种粒排播质量。因此本文选取主轴转速与压簧线径作为试验因素,由于单体机构动力输出由地轮提供,其作业过程中存在滑移误差,故采用Peakmeter-MS6208b型非接触式转速表对单体作业过程进行实时测量并试验,同时定做不同线径的回位压簧分别装配后进行相应试验。
由于本文主要针对机构的扎穴排播性能进行试验,对于充种型孔和清种装置的设计与分析不做详细说明,故不检测重播率与漏播率,依据GB/T 6973—2005《单粒(精密)播种机试验方法》,选取试验评价指标为合格指数和变异系数,其计算公式为
(21)
式中M——合格指数N——理论播种数
n——单播次数
(22)
式中Cv——变异系数σd——粒距标准差
μd——粒距平均值,测量相邻两种粒间几何中心距离,并记录测试结果而得
3.2 试验条件
试验地点为黑龙江省农业机械工程科学研究院土槽试验室,试验装置为TCC-III型计算机监控辅助测试试验台车、土槽台架和牵引悬挂架等,试验台车为全液压四轮驱动,可在0~8 km/h范围内调速,牵引悬挂架的液压系统控制调节机构单体的作业高度。土壤类型为粉砂质壤土(典型东北黑土),土壤平均湿度为17.6%、平均土壤坚实度0.175 MPa(深度10 mm)。由于此播种器可对不同种类的大粒作物进行穴播作业,若改变作业品种,则需根据品种籽粒的几何外形将型孔进行适应性设计即可,在本文中选取紫甜糯6号玉米种粒作为初步试验品种。土槽试验台结构示意图与实物图如图13、14所示。
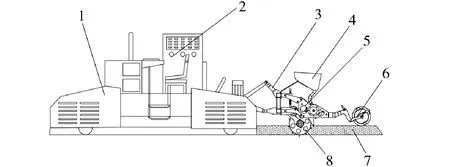
图13 机构单体土槽试验台示意图Fig.13 Picture of test bed of single body soil bin1.TCC-III型计算机监控辅助测试试验台车 2.调速控制台 3.牵引悬挂架 4.种箱 5.排种机构单体 6.镇压装置 7.土槽台架 8.驱动地轮

图14 土槽试验实物图Fig.14 Soil bin test physical photo
3.3 试验内容与方法
根据上述理论分析,将回转角速度转换为主轴转速,选取范围为19.1~57.3 r/min,回位压簧线径取1.0~1.8 mm。在此基础上采用二因素五水平二次旋转组合设计试验以确定播种器最优工作参数组合,试验因素编码如表1所示。
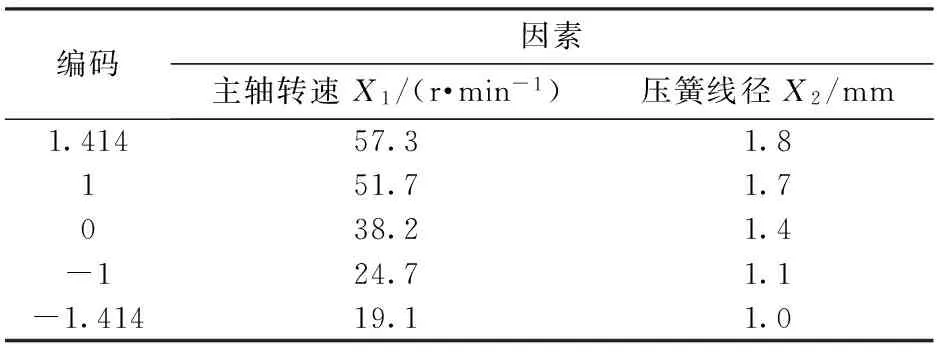
表1 试验因素编码Tab.1 Coding of level and experimental factors
试验结果如表2所示(x1、x2为因素编码值),试验参数设计值与实际加工误差小于1.5%,通过Design-Expert 10.0.3软件对试验数据回归分析[17],进行因素方差分析,筛选出较为显著(P<0.05)的影响因素,进而得出相应真实值的回归方程

(23)
(24)
3.4 试验结果与分析
为直观分析试验指标与因素间关系,运用Design-Expert 10.0.3软件得到响应曲面,如图15所示。根据上述回归方程和响应曲面图可知,主轴转速与压簧线径间存在交互作用。由图15a可知,当压簧线径一定时,合格指数随主轴转速的增加先保持稳定后降低,其变化区间较大;当主轴转速一定时,合格指数随压簧线径的增大而逐渐升高后保持稳定,合格指数的变化区间较大,因此主轴转速是影响合格指数的主要因素。由图15b可知,当压簧线径一定时,变异系数随主轴转速的增加而升高;当主轴转速一定时,变异系数随压簧线径的增大先降低后保持稳定。且两者对变异系数的影响区间均较大,因此主轴转速与压簧线径均为影响变异系数的主要因素。
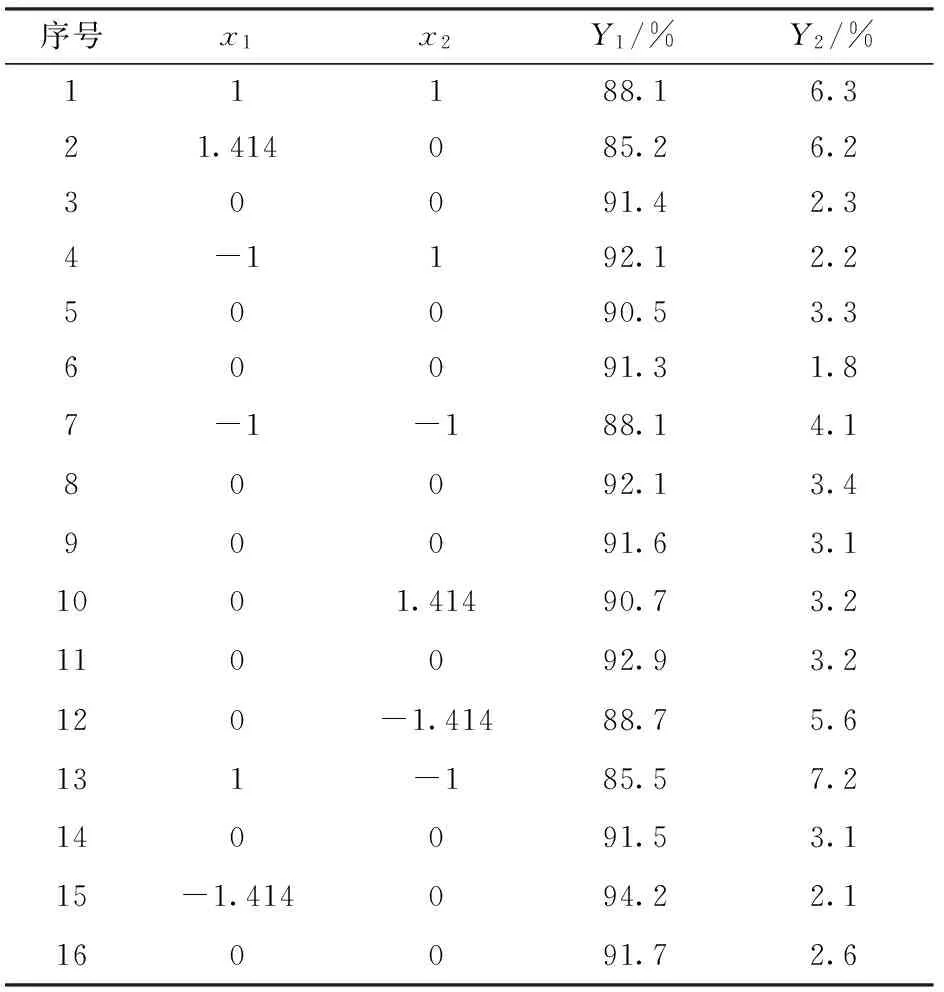
表2 试验方案与结果Tab.2 Experiment design and results
为得到试验因素的最佳水平组合,对试验因素进行优化设计。建立参数化数学模型,结合试验因素的边界条件,对合格指数和变异系数的回归方程进行分析,得到其非线性规划的数学模型为
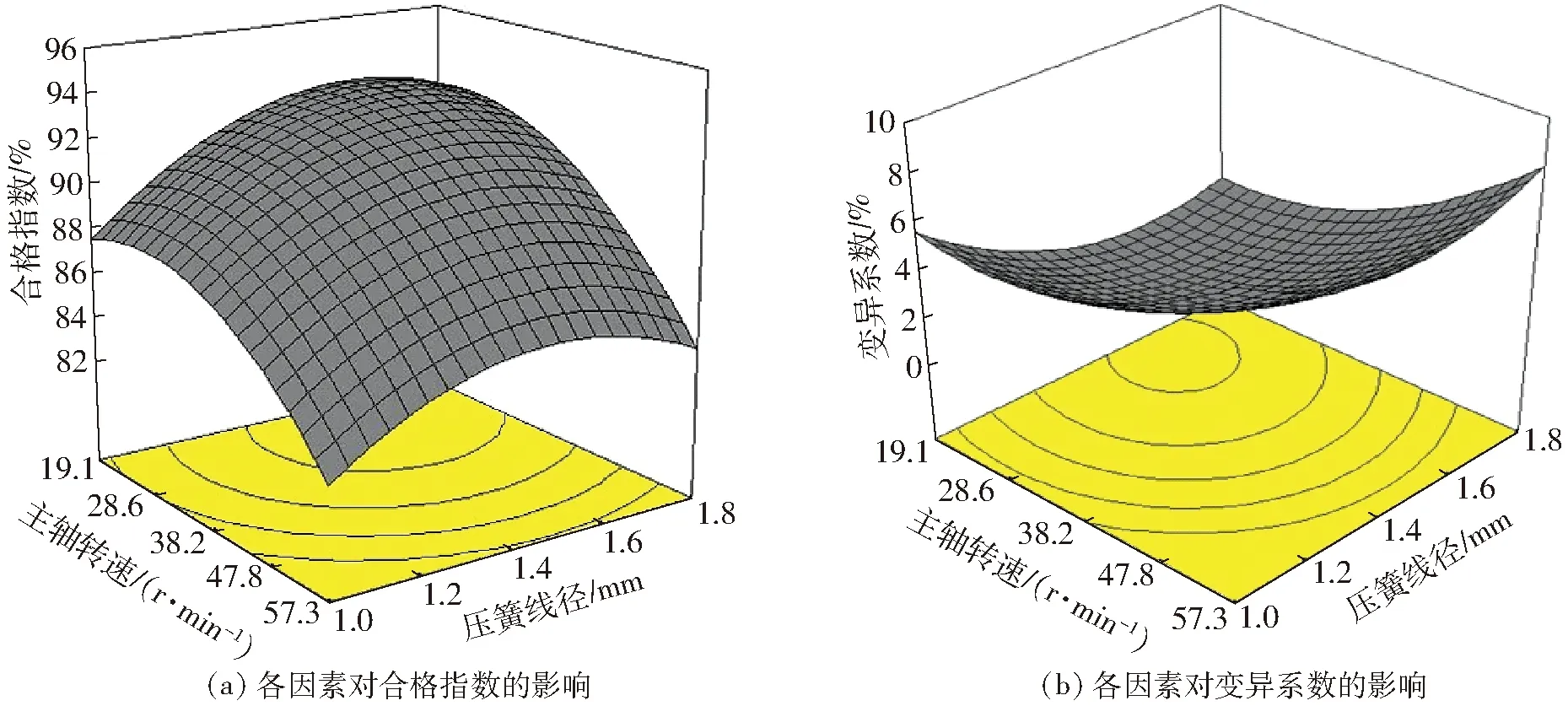
图15 各因素对试验性能指标影响的响应曲面Fig.15 Response surface of effect of each factor to experiment performance index
(25)
主轴转速约为26.5 r/min,压簧线径为1.5 mm时,播种质量可靠性较高,合格指数为93.2%,变异系数为1.8%,如图16所示。根据优化结果进行试验验证,合格指数为92.7%,变异系数为2.2%,与优化结果基本一致,误差在可接受范围内。满足JB/T 10293—2001《单粒(精密)播种机技术条件》中各项指标要求。
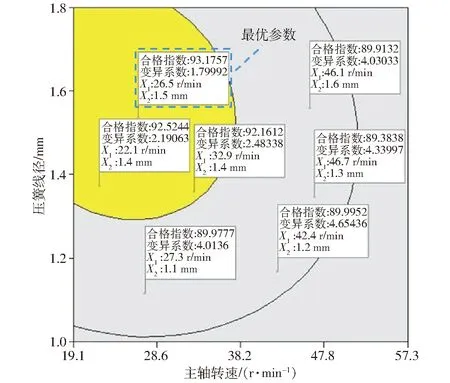
图16 参数优化分析图Fig.16 Parametric optimization analysis chart
4 田间试验
为进一步检验回转扎穴式播种器的工作性能,于2017年4月28日在哈尔滨市向阳农场进行田间播种试验,试验前进行旋耕整地及起垄作业,使试验土壤疏松规整,测得土壤平均湿度为16.8%、平均土壤坚实度0.209 MPa(深度10 mm),满足农艺播种要求,配套动力拖拉机功率33 kW,试验样机为黑龙江省农业机械科学研究院加工的机构单体,试验过程及所用测试装置如图17所示。测试方法为随机选取2行,每行测区长度为20 m。

图17 田间试验Fig.17 Field experiment
当转速表测得转速为27 r/min时,保持前进速度不变,并配装1.5 mm线径的回位压簧进行验证试验,其结果为合格指数92.1%,变异系数为2.5%,与优化结果及台架试验验证结果基本一致。
5 结论
(1)设计了一种旱地回转扎穴式播种器,对其工作原理进行了阐述,并通过分析种粒在内部的动力学特性进一步对关键核心部件——偏心凹轮、回位压簧进行了参数设计,满足结构精简、操作简单、高质量的播种作业要求。
(2)采用二次正交旋转组合设计试验,建立播种性能指标与试验因素间数学模型,运用Design-Expert 10.0.3软件对试验数据进行整理分析,对回归数学模型进行多目标优化,得出主轴转速为26.5 r/min,压簧线径为1.5 mm时,合格指数为92.7%,变异系数为2.2%,通过田间验证试验表明,在优化后的工况下,旱地回转扎穴式播种器的入土可靠性与播种质量均表现良好。通过响应曲面图直观分析出试验因素对指标的影响趋势和交互作用关系,验证试验结果与优化结果基本一致。
(3)对于变异系数而言,回转扎穴式播种器可接近现有电驱式直播机(约2.5%)[18];相比目前穴播机降低了约1.3%[19-22];相比传统排种器降低了约7%[22],且在作业过程中实现了零堵塞,进一步提高了穴播质量和排播可靠性。
1 杨丽,颜丙新,张东兴,等.玉米精密播种技术研究进展[J/OL].农业机械学报,2016,47(11):38-48.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161106&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.11.006.
YANG Li,YAN Bingxin,ZHANG Dongxing,et al.Research progress on precision planting technology of maize[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(11):38-48.(in Chinese)
2 刘宏新,王盼,改广伟,等.基于五杆机构的注射式免耕播种成穴轨迹分析与参数求解[J].农业工程学报,2017,33(8):21-29.
LIU Hongxin,WANG Pan,GAI Guangwei,et al.Analysis and parameter solution of injection type no-till seeding into hole trajectory based on five-bar mechanism[J].Transactions of the CSAE,2017,33(8):21-29.(in Chinese)
3 李复辉,杜瑞成,刁培松,等.舵轮式玉米免耕精量施肥播种机设计与试验[J/OL].农业机械学报,2013,44(增刊1):33-38.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2013s107&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.S1.007.
LI Fuhui,DU Ruicheng,DIAO Peisong,et al.Design and experiment of helm-shaped no-tillage precision fertilization planter for corn[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(Supp.1):33-38.(in Chinese)
4 戴飞,赵武云,石林榕,等.基于近等速机构的玉米全膜双垄沟穴播机设计与试验[J/OL].农业机械学报,2016,47(11):74-81.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161110&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.11.010.
DAI Fei,ZHAO Wuyun,SHI Linrong,et al.Design and experiment of hill-seeder with wphole plastic-film mulching on double ridges for corn based on mechanism with approximate constant Speed[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(11):74-81. (in Chinese)
5 奚如如, 杜瑞成, 刘华伟,等. 舵轮气吸式双入土器精密穴播施肥器的设计[J]. 农机化研究, 2010, 32(10):87-90.
XI Ruru, DU Ruicheng, LIU Huawei,et al.Design and doube-hole former heim-shaped pneumatic precision hill planter of seed and fortilizer[J]. Jounral of Agricultural Mechanization Reserch,2010,32(10):87-90.(in Chinese)
6 周福君,李沐桐,李天宇. 型孔式扎穴排种单体:201710007400.9 [P].2017-01-05.
7 周福君,李沐桐,李天宇. 一种配装在扎穴排种单体上的外型孔轮:201710007398.5 [P]. 2017-01-05.
8 王金武, 张春凤, 周文琪,等. 基于MATLAB仿真的非规则齿轮行星系扎穴机构的优化设计[J]. 农业工程学报, 2016,32(3):22-28.
9 郗晓焕, 王金武, 郎春玲,等. 液态施肥机椭圆齿轮扎穴机构优化设计与仿真[J]. 农业机械学报, 2011, 42(2):80-83.
XI Xiaohuan, WANG Jinwu, LANG Chunling,et al. Optimal design and simulation on pricking hole mechanism of liguid fertilizer applicator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011,42(2):80-83.(in Chinese)
10 贾洪雷,王万鹏,陈志,等.农业机械触土部件优化研究现状与展望[J/OL].农业机械学报,2017,48(7):1-13.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170701&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.07.001.
JIA Honglei,WANG Wanpeng,CHEN Zhi,et al.Research status and prospect of soil-engaging components optimization for agricultural machinery[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(7):1-13.(in Chinese)
11 贾洪雷,李杨,齐江涛,等.基于ZigBee的播种行表层土壤坚实度采集系统[J/OL].农业机械学报,2015,46(12):39-46,61.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20151206&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.12.006.
JIA Honglei,LI Yang,QI Jiangtao,et al.Design and test of soil compaction acquisition system for sowing line surface based on ZigBee[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(12):39-46,61.(in Chinese)
12 贾洪雷,罗晓峰,王文君,等.滑动耕作部件作业阻力测试装置设计与试验[J/OL].农业机械学报,2017,48(4):56-64.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170407&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.04.007.
JIA Honglei,LUO Xiaofeng,WANG Wenjun,et al.Design and experiment of tillage resistance testing devicefor sliding cultivate component[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(4):56-64.(in Chinese)
13 赵淑红,刘宏俊,张先民,等.滑推式开沟器设计与作业性能优化试验[J].农业工程学报,2016,32(19):26-34.
ZHAO Shuhong,LIU Hongjun,ZHANG Xianmin,et al.Design and optimization experiment of working performance of sliding push opener[J].Transactions of the CSAE,2016,32(19):26-34.(in Chinese)
14 范旭辉,贾洪雷,张伟汉,等.免耕播种机仿形爪式防堵清茬机构参数分析[J].农业机械学报,2011,42(10):56-60.
FAN Xuhui,JIA Honglei,ZHANG Weihan,et al.Parametric analysis of finger-type anti-blocking residue-cleaner for no-till planting[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(10):56-60.(in Chinese)
15 王金武, 唐汉, 周文琪,等. 指夹式精量玉米排种器改进设计与试验[J/OL]. 农业机械学报, 2015, 46(9):68-76.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150910&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.09.010.
WANG Jinwu,TANG Han,ZHOU Wenqi,et al.Improved design and experiment on pickup finger precision seed metering device[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(9):68-76.(in Chinese)
16 王金武,唐汉,王奇,等.基于EDEM软件的指夹式精量排种器排种性能数值模拟与试验[J].农业工程学报,2015,31(21):43-50.
WANG Jinwu,TANG Han,WANG Qi,et al.Numerical simulation and experiment on seeding performance of pickup finger precision seed-metering device based on EDEM[J].Transactions of the CSAE,2015,31(21):43-50.(in Chinese)
17 李沐桐,温翔宇,周福君.中耕作物精准穴施肥控制机构工作参数优化与试验[J/OL].农业机械学报,2016,47(9):37-43.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160906&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.09.006.
LI Mutong,WEN Xiangyu,ZHOU Fujun.Working parameters optimization and experiment of precision hole fertilization control mechanism for intertilled crop[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(9):37-43.(in Chinese)
18 石林榕,赵武云,孙伟,等.电驱式小区玉米膜上直插穴播机的研制与试验[J].农业工程学报,2017,33(4):32-38.
SHI Linrong,ZHAO Wuyun,SUN Wei,et al.Development and experiment of electric driving insert hill-drop planter on film for plot corn[J].Transactions of the CSAE,2017,33(4):32-38.(in Chinese)
19 李复辉,刁培松,杜瑞成,等.内嵌勺盘式舵轮免耕施肥播种机的研制与试验[J].农业工程学报,2013,29(19):16-23.
LI Fuhui,DIAO Peisong,DU Ruicheng,et al.Development and test of no-tillage fertilization planter with embedded spoon disc helm wheel[J].Transactions of the CSAE,2013,29(19):16-23.(in Chinese)
20 张明华,罗锡文,王在满,等.水稻精量穴直播机仿形与滑板机构的优化设计与试验[J].农业工程学报,2017,33(6):18-26.
ZHANG Minghua,LUO Xiwen,WANG Zaiman,et al.Optimization design and experiment of profiling and slide board mechanism of precision rice hill-drop drilling machine[J].Transactions of the CSAE,2017,33(6):18-26.(in Chinese)
21 曹秀英, 廖庆喜, 丛锦玲,等. 离心式油菜精量排种器型孔结构设计与试验[J/OL]. 农业机械学报, 2014,45(增刊):40-46.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2014s107&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.S0.007.
22 王吉奎,郭康权,土鲁洪,等.夹持自锁式棉花精量穴播轮的研究[J].农业工程学报,2008,24(6):125-128.
WANG Jikui, GUO Kangquan, TU Luhong, et al.Improved design of the clamping and self-locking cottonseed precision dibbler[J].Transactions of the CSAE,2008,24(6):125-128.(in Chinese)
23 夏俊芳,许绮川,吴一鸣,等.旱作多功能精密穴播轮成穴机理的研究[J].农业工程学报,2001,17(5):11-14.
XIA Junfang,XU Qichuan,WU Yiming,et al.Mechanism study of forming sinus and casting seed for multi-functional precision hill-drop sowing wheel for dryland crop[J].Transactions of the CSAE,2001,17(5):11-14.(in Chinese)
24 刘宏新,闻浩楠,改广伟,等.被动滚筒式免耕播种成穴机构设计与试验[J/OL].农业机械学报,2017,48(9):53-61.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170907&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.09.007.
LIU Hongxin,WEN Haonan,GAI Guangwei, et al.Design and experiment on passive drum-type no-till planter cavitation mechanism[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(9):53-61.(in Chinese)
25 刘忠军,刘立晶,杨学军,等.指夹式玉米免耕精密播种机的设计与试验[J].农业工程学报,2016,32(增刊2):1-6.
LIU Zhongjun,LIU Lijing,YANG Xuejun,et al.Design and experiment of no-till precision planter for corn[J].Transactions of the CSAE,2016,32(Supp.2):1-6.(in Chinese)
26 王金武,唐汉,王金峰,等.指夹式玉米精量排种器导种投送运移机理分析与试验[J/OL].农业机械学报,2017,48(1):29-37,46.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170105&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.01.005.
WANG Jinwu,TANG Han,WANG Jinfeng,et al.Analysis and experiment of guiding and dropping migratory mechanism on pickup finger precision seed metering device for corn[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):29-37,46. (in Chinese)
猜你喜欢
电镀与涂饰(2022年9期)2022-06-09 03:06:50
电子乐园·中旬刊(2021年4期)2021-03-07 09:19:07
制造技术与机床(2018年10期)2018-10-13 06:36:48
科学中国人(2018年8期)2018-07-23 02:26:56
重庆理工大学学报(自然科学)(2017年6期)2017-07-06 11:03:23
中国科技纵横(2016年4期)2016-11-19 20:22:17
科教导刊·电子版(2016年2期)2016-03-12 22:30:52
纺织服装周刊(2014年36期)2014-04-29 21:24:42
上海计量测试(2014年5期)2014-03-14 09:06:04
断块油气田(2014年5期)2014-03-11 15:33:49