
基于压缩传感的高精度同步相量测量方法
2018-03-10 01:34于华楠郭树旭
吉林大学学报(工学版) 2018年1期
于华楠,杜 瑶,郭树旭
(1.东北电力大学 信息工程学院,吉林省 吉林市132012;2.吉林大学 电子科学与工程学院,长春 130012)
0 引 言
广域测量系统(Wide area measurement system,WAMS)作为电网动态实时监测的新技术和重要手段,能实时地反映全网系统的动态变化,对电网的安全稳定运行起到了重要的作用[1]。而基于GPS技术的同步相量测量单元(Phasor measurement unit,PMU)正是WAMS系统的核心与基础[2,3],并已被广泛应用在电网中以获得电网的实时动态变化,为实现电力系统动态监测提供了可能。
目前,国内外学者提出了多种同步相量测量算法,主要包括离散傅里叶变换(Discrete Fourier transform,DFT)法[4]、过零点检测法(Zero crossing technique)[5]和数字滤波器法[6,7]等。其中,由于DFT算法适用于快速运算,且具有良好的谐波抑制特性,在静态条件下具有较好应用价值,而被广泛应用到同步相量测量中。但在非同步采样的情况下,现有的DFT算法往往会在幅值和频率测量上出现误差,且误差会随着非同步性的增强而急剧增大,导致出现频谱泄露和栅栏效应,使温测量结果达不到实际应用的要求[8]。因此,这种误差使DFT算法存在一定的局限性,降低了相量测量的准确度,以至于直接影响到WAMS的应用效果。同步相量的不准确测量最终将导致电网的动态安全监控能力下降,严重时将影响电网的安全稳定运行[9]。
本文将压缩传感理论与DFT算法相结合,在无显著延长总观测时间的条件下,改善了算法性能,实现了对信号的精确测量,为同步相量测量装置(Phasor measurement unit,PMU)的实现打下了良好基础。
1 相量测量基本原理
同步相量测量装置(Phasor measurement unit,PMU)是用于同步相量的测量与输出,并进行动态数据记录的装置[10,11]。PMU的基本原理为:首先由GPS接收器输出1 PPS信号,经过锁相振荡器后,信号被划分成一定数量的脉冲用于采样,再对信号进行滤波,然后经数模(A/D)转换器量化,最后按照离散傅里叶变换原理,经微处理器计算出相量[12]。PMU装置是电力系统实时动态监测的重要组成部分,因此,其必须具有较高的精确度和可靠性,确保电力系统运行处于安全、稳定的状态,同时保障数据测量的精度。PMU的典型结构如图1所示。
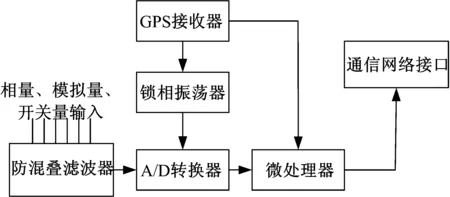
图1 PMU结构图Fig.1 Structure of PMU
在实际测量时,电网频率总是在工频(50 Hz)附近波动,使系统频率和采样频率不能同步,造成非同步采样,导致出现频谱泄露和栅栏效应,影响系统测量精度。因此,为消除或减小由于非同步采样造成的DFT测量误差,本文提出了一种基于压缩传感的修正离散傅里叶变换的同步相量测量算法。
2 CS-DFT算法
2.1 压缩传感理论
压缩传感(Compressed sensing,CS)理论是由Donoho等[13,14]提出的一种新型的信息获取指导理论。该理论指出:对可压缩的信号可通过远低于奈奎斯特标准的方式进行数据采样,仍能精确地恢复出原始信号。压缩传感的优点在于信号的投影测量数据量远远小于传统采样方法所获得数据量,突破了奈奎斯特采样定理的瓶颈,使得高分辨率信号的采集成为可能。
压缩传感理论主要包括3个方面:稀疏表示、编码测量和重构算法。图2为压缩传感理论的基本框架。

图2 压缩传感理论基本框架Fig.2 Basic framework of compressed sensing theory
下面从这3个方面对压缩传感理论进行分析:
设测量信号为x∈Rn×1,其中n为信号长度,对x进行压缩传感的过程如下。
(1)稀疏表示:信号的稀疏变换就是信号必须在某种变换下稀疏表示,这是压缩传感的先验条件。设计过完备字典D={D1,D2,…,Dn},使信号x在过完备字典上具有稀疏性,即:
x=Da
(1)
式中:a是稀疏变量。
(2)编码测量:在编码测量中最重要的一步是确定投影矩阵,为了确保信号的线性投影能够保持信号的原始结构,投影矩阵必须满足约束等距性(Restricted isometry property,RIP)条件。设观测矩阵为Φ∈Rm×n(m≪n),则测量向量为y=Φx。
(3)信号重构:先运用重构算法由测量值及投影矩阵重构原始信号,即从测量向量y中恢复出原始信号x,然后利用重构算法求解最优问题min‖x‖,s.t.y=Φx。
2.2 信号的建模
本文以信号的标准形式为出发点,来表示不同特征的电力信号[15]:
s(t)=Acos(ϖt+φ)
(2)
式中:ϖ为角频率;φ为初相角;A为幅值,其利用欧拉公式可以展开为:
(3)
由于实际同步相量测量信号能够通过多个正弦波叠加的形式来表示,因此可利用复指数形式表示为:
(4)
式中:Ah为正弦信号的幅值;φh为相角;fh为第h个波形分量的频率值,且fh=h·f0,其中f0为基波频率,h为正弦波的个数;t为时间。
现给定长度为N的样本序列,对其进行DFT算法处理,可得到一组相应的N个频域系数,即:

(5)
式中:k为采样点数,0≤k (6) 式中:v为离散归一化频率。 为提高同步相量测量算法的频率分辨率,由频率分辨率的定义: (7) 可知,首先引入插值因子P(P为一个大小合适的整数),使N′=PN,以此使算法具有高频率分辨率,即: (8) 式中:N为采样点数;T为采样间隔。 由此,同步相量测量信号的归一化频率为: (9) (10) (11) 0≤k 为了使同步相量的测量运算起来更加简单、直观,可将式(8)写成更紧凑的矩阵形式: s≈Da (12) 式中:s为包含同步相量测量信号DFT系数的向量;D为N×N′维矩阵;a为包含同步相量测量信号的相量值的向量,且由于a中大多数元素均为零,因此,可认为a具有稀疏性。 在实际测量测量中,还需要考虑噪声等不定因素,因此,式(12)为: X=s+n=Da+e (13) 式中:X为原始测量向量;e为噪声信号。 因此,由上述分析可知,可将该问题看作为压缩传感问题,即考虑将CS方法与DFT算法相结合应用于同步相量测量中。其中,用CS理论解求解(13)的表示如下: (14) 式中:‖a‖0是l0的范数,即a的非零元素的个数;ε为给定的阈值。 引入矩阵DSt,其仅由以下算法步骤选择的D矩阵的列组成,最初DS0有零列。该迭代计数器设置t=1。 步骤2 查找索引lt,使得: (15) 式中:上标H表示复共轭转置矩阵;rt-1为残差值;t为迭代次数。这一步迭代覆盖了该算法的索引恢复部分。 步骤4 计算一个新的向量: (16) 式中:t是非零元素。这一步的迭代提供了逐步细化的估计。 总的来说,CS-DFT算法是压缩传感与DFT算法的融合。首先利用离散傅里叶变换对测量信号进行稀疏化,再通过狄利克雷函数来构造观测矩阵,最后,OMP算法在稀疏矩阵约束范围内搜索最优的匹配原子,提取特征信息,最后重构出原测量信号,为同步相量测量的进一步分析实验奠定了良好的基础。 本文采用基波频率为50 Hz的同步相量测量信号,信号采样点数为1024个,采样频率为5.12 kHz,时间为0.2 s,对测量信号进行分析,总结其基本特征,构建典型测量信号的数学模型,包括谐波和间谐波信号、频率斜升信号、幅度和相位调制信号,以及幅度和相位阶跃信号,如图3所示。 图3 测量信号模型Fig.3 Model of measurement sign 目前,衡量相量测量单元(PMU)性能的主要指标有两种:一是采用幅度误差和相位误差分别评价的方法;二是采用综合矢量误差(Total vector error,TVE)来评价同步相量测量装置的测量误差[15]。但由于TVE指标更为科学、全面,可同时反映相量误差和幅度误差,因此,本文采用TVE评价方法。 TVE定义如下: (17) 式中:XR为理想信号相量的实部;XI为理想信号相量的虚部;XR(n)为实测相量的实部;XI(n)为实测相量的虚部。 利用本文方法对典型测量信号进行MATLAB仿真实验,得到其DFT分析和CS-DFT分析。 (1)在本次实验中,以相位调制信号和相位阶跃信号为例,其中,相位调制信号的采样频率为5.12 kHz,载波频率为100 Hz,采样点数为1024个,信号频率为40 Hz;相位阶跃信号的采样频率为5.12 kHz,采样点数为1024个,信号频率为50 Hz,实验对比结果分别如图4、图5所示。 图4 相位调制信号的DFT和CS-DFT分析Fig.4 DFT and CS-DFT analysis of phasemodulation signal 图5 相位阶跃信号的DFT和CS-DFT分析Fig.5 DFT and CS-DFT analysis of phase step signal 由图4和图5可以看出,本文CS-DFT方法能够有效地消除或减弱现有基于离散傅里叶变换的同步相量测量装置中普遍存在的频谱泄露和栅栏效应,提高了相量测量的准确度,减小了测量误差,为WAMS系统打下了良好的基础,为实现电力系统动态监测提供了可能。 (2)在本次实验中,分别用DFT和CS-DFT两种算法对信号进行相量测量,得到各时刻的TVE值如图6、图7所示,其中以相位调制信号为例,时间为0.5 s,采样点数为1024个,采样频率为5.12 kHz。图6为在相位调制信号下的传统DFT算法的TVE值,图7为在相位调制信号下的CS-DFT算法的TVE值。 图6 相位调制信号下DFT算法的TVE值Fig.6 TVE of DFT under phase modulation signal 图7 相位调制信号下CS-DFT算法的TVE值Fig.7 TVE of CS-DFT under phase modulation signal 由图6和图7可明显看出,DFT算法和CS-DFT算法的TVE值分别控制在0.6%和0.14%以下,TVE值均在合理范围内,且CS-DFT算法的TVE值均小于DFT算法,由此可证明两种算法均能满足相量测量的要求,CS-DFT算法的性能更优。 (3)为进一步证明CS-DFT算法的测量精度和通用性,使测量结果更加准确,在本次实验中,以实际获取的工频测量信号为例,如图8所示。 显而易见,该工频测量信号含有干扰信号,对其分别用DFT和CS-DFT两种算法进行分析实验,得到各时刻的TVE值如图9所示。 图8 工频测量信号Fig.8 Power frequency measuring signal 图9 工频测量信号下DFT和CS-DFT算法的TVE值Fig.9 TVE of DFT and CS-DFT under power frequencymeasuring signal 由图9可明显看出,在对不同测量信号进行MATLAB仿真实验时,CS-DFT算法的TVE值均小于DFT算法,由此得出结论,CS-DFT算法指标优于DFT算法,CS-DFT算法对测量信号实现了精度更高的测量。 本文提出一种基于压缩传感理论的同步相量测量方法,该方法可对测量信号的同步相量进行准确、有效的测量,同时可明显消除或减小由于非同步采样造成的离散傅里叶变换的测量误差,在很大程度上改善了传统DFT算法的测量精度,能够满足WAMS系统的相关标准及要求,为实现电力系统动态监测和安全稳定运行提供了有力的保障。 [1] 李建,谢小荣,韩英铎. 同步向量测量的若干关键问题[J]. 电力系统自动化,2005,29(1):45-48. Li Jian, Xie Xiao-rong, Han Ying-duo. Key issues of the synchronized vector measurement [J]. Automation of Electric Power Systems, 2005, 29(1):45-48. [2] 吴京涛,谢小荣,王立鼎,等. 广域测量系统在电力系统的发展与展望[J]. 电力设备,2006,7(3):26-29. Wu Jing-tao, Xie Xiao-rong, Wang Li-ding, et al. Wide Area Measurement System Development and Prospect in the power system [J]. Electric Power Equipment, 2006, 7(3):26-29. [3] Alasti H. Non-uniform-level crossing sampling for efficient sensing of temporally sparse signals [J]. Wireless Sensor Systems, 2014, 4(1):27-34. [4] 王茂海,孙元章. 基于DFT的电力系统相量及功率测量新算法[J]. 电力系统自动化,2005,29(2):20-24. Wang Mao-hai, Sun Yuan-zhang. A DFT-based method for phasor and power measurement in power systems [J]. Automation of Electric Power Systems, 2005, 29(2):20-24. [5] 周捷,陈尧,崔建中. 母线电压同步相角测量算法研究及实现[J]. 继电器,2002,30(3):13-16. Zhou Jie,Chen Yao,Cui Jian-zhong. Study and implementation of the algorithm for bus synchronized voltage phase angle measurement [J]. Relay,2002,30(3):13-16. [6] Kamwa I, Samantaray S R, Joos G. Compliance analysis of PMU algorithms and devices for wide-area stabilizing control of large power systems [J]. IEEE Trans on Power Systems, 2013, 28(2):1766-1778. [7] 汪芙平,靳夏宁,王赞基. 实现动态相量测量的FIR数字滤波器最优设计[J]. 中国电机工程学报,2014,34(15):2388-2395. Wang Fu-ping, Jin Xia-ning, Wang Zan-ji.Optimal design of FIR digital filters for dynamic phasor measurement[J]. Proceedings of the CSEE, 2014, 34(15):2388-2395. [8] 徐建源,王亮,林莘,等. 基于递推DFT同步相量测量算法的研究[J]. 高压电器,2011,47(11):40-44. Xu Jian-yuan, Wang Liang, Lin Shen, et al. Based on recursive DFT phasor measurement algorithm [J]. High Voltage Apparatus, 2011, 47(11):40-44. [9] 丁涛,董柏峰,顾伟,等. 基于PMU的电压稳定动态线性化指标优化切负荷算法[J]. 电力系统保护与控制,2013,41(9):27-33. Ding Tao, Dong Bai-feng, Gu Wei, et al. Optimization of a load shedding scheme using dynamic voltage stability linearized index based on PMU [J]. Power System Protection and Control, 2013, 41(9):27-33. [10] Faiz J, Lotfi-fard S, Shahri S H. Prony-based optimal bayes fault classification of overcurrent protection [J]. IEEE Transactions on Power Delivery, 2007, 22(3):1326-1334. [11] Mai R K, He Z Y, Fu L, et al. A dynamic synchrophasor estimation algorithm for online application [J]. IEEE Transactions on Power Delivery, 2010, 25(2):570-578. [12] 毕天姝,刘灏,杨奇逊. PMU 算法动态性能及其测试系统[J]. 电力系统自动化,2014,38(1):62-67. Bi Tian-shun, Liu Hao, Yang Qi-xun. PMU algorithm and dynamic performance test system [J]. Automation of Electric Power Systems, 2014, 38(1):62-67. [13] Donoho D L. Compressed sensing [J]. IEEE Transactions on Information Theory, 2006, 52(4):1289-1306. [14] Donoho D L, Tsaig Y. Extensions of compressed sensing[J]. Signal Processing, 2006, 86(3):533-548. [15] C37.118—2005. IEEE standard for synchrophasors for power systems[S].2.3 算法实现





3 仿真实验
3.1 测量信号模型
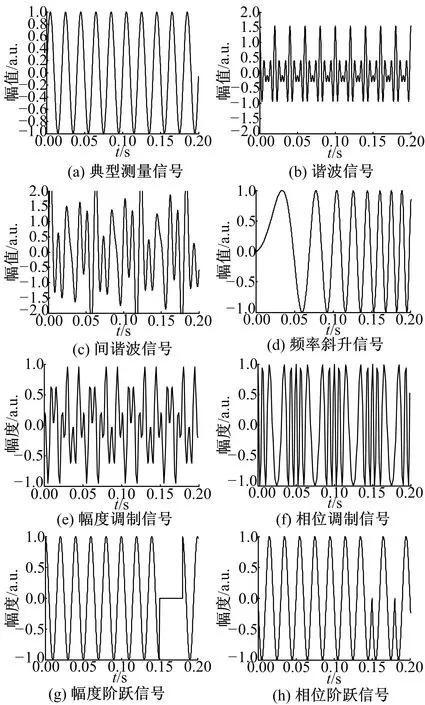
3.2 算法性能评价
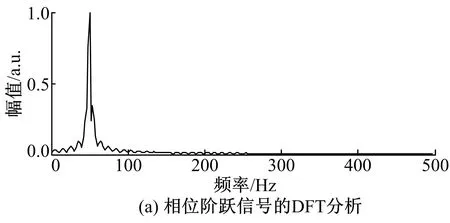
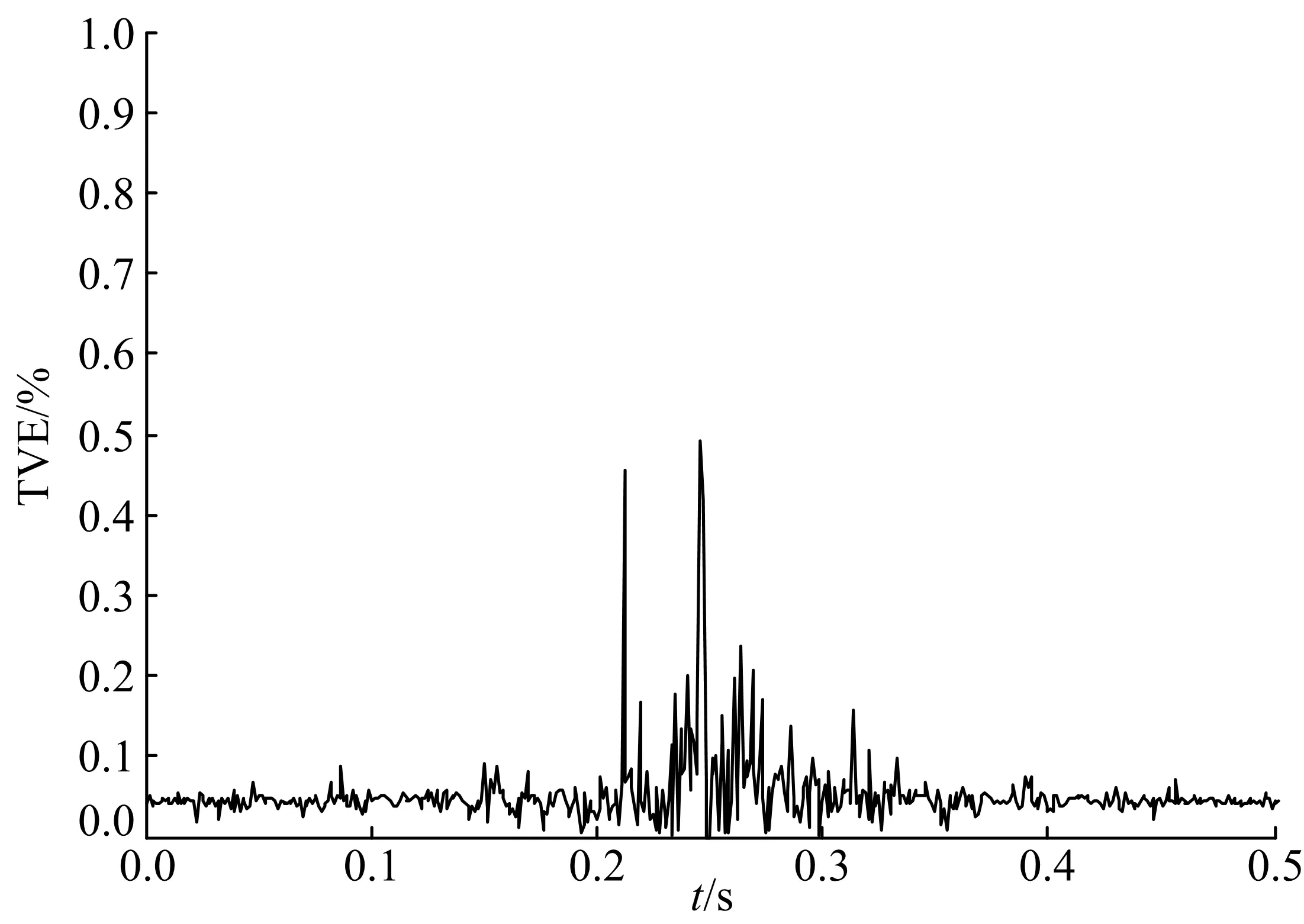
3.3 仿真实验及结果分析





4 结束语
猜你喜欢
传感技术学报(2022年7期)2022-10-19今日农业(2022年15期)2022-09-20天天爱科学(2020年6期)2020-09-10电子制作(2018年23期)2018-12-26探索科学(2017年4期)2017-05-04哈尔滨理工大学学报(2016年2期)2016-09-12中央民族大学学报(自然科学版)(2016年3期)2016-06-27南都周刊(2015年4期)2015-09-10南都周刊(2015年3期)2015-09-10南都周刊(2015年1期)2015-09-10
