
红外探测器盲元检测及评价
2018-03-09 07:49李成立吕俊伟王佩飞
激光与红外 2018年2期
李成立,吕俊伟,王佩飞,梁 平
(1.海军航空大学控制工程系,山东 烟台 264001;2.海军航空大学飞行器工程系,山东 烟台 264001)
1 引 言
红外焦平面阵列( Infrared Focal Plane Arrays,IRFPA)是红外成像系统的关键器件,被广泛应用于红外制导导弹和红外光电载荷。但是由于制作器件和使用环境等各种综合因素的影响[1],当受到相同程度的红外辐射时,焦平面阵列探测单元的响应产生较大的差异[2],有可能会产生盲元现象。盲元的存在严重影响红外成像的质量,当检测图像中的弱小目标时,可能会出现漏检目标的情况,因此在红外制导导弹和红外光电载荷使用之前要先对其成像系统进行盲元检测[3]。目前对盲元的检测算法有很多,文献[4]中提出通过9×9窗格响应和中值滤波法进行盲元检测,有效地实现了盲元数量和位置的确定,文献[5]中提出了将图像窗口分割,然后通过计算窗口内标准差和均值大小来检测盲元的算法,文献[6]对有效像元的模型进行了分析,对其选取的分类算法进行了改进,得到有效像元的分布区间和更加精确的盲元分类准则,文献[7]提出基于场景的时域平均野值提取(Temporal-Mean Outlier-Extraction,TMOE)的盲元检测算法,无需依赖黑体辐射定标,能检测出成像过程中出现的随机盲元。上述算法在盲元分散的情况下检测效果较好,但是在盲元连续的情况下检测效果并不理想,可能会出现盲元漏判的现象。
本文对TMOE盲元检测算法进行了改进,对滤波窗口下盲元的分布形式进行了讨论,对连续盲元提出基于时域平均和空域均值野值提取的盲元检测算法。算法先通过帧间时域平均和帧内空域平均做差,然后设置阈值对盲元进行判别,对连续盲元具有较好的检测效果。最后根据罗曼诺夫斯基准则,建立红外制导武器探测器盲元程度的评价指标和评定准则,作为判断红外制导武器成像探测器能否正常工作的依据。
2 盲元检测算法
2.1 TMOE盲元检测算法

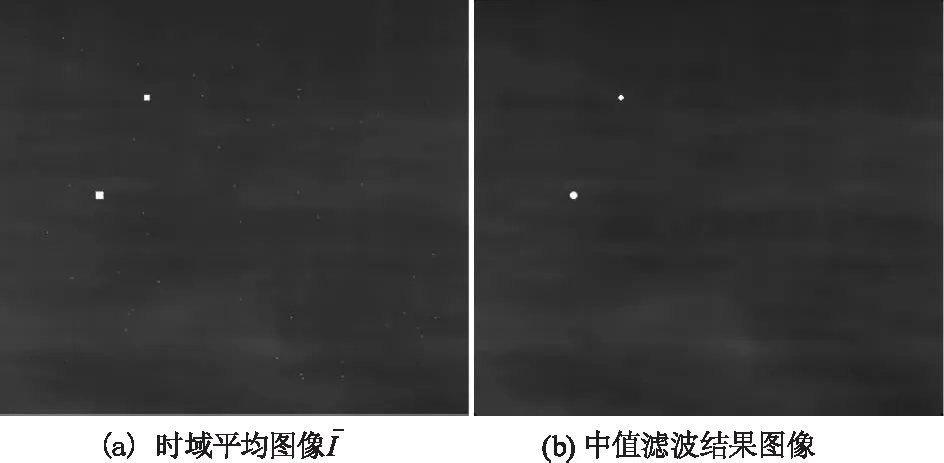
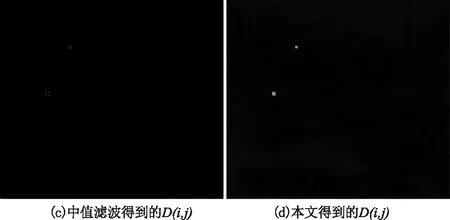
图1 检测算法各步骤结果
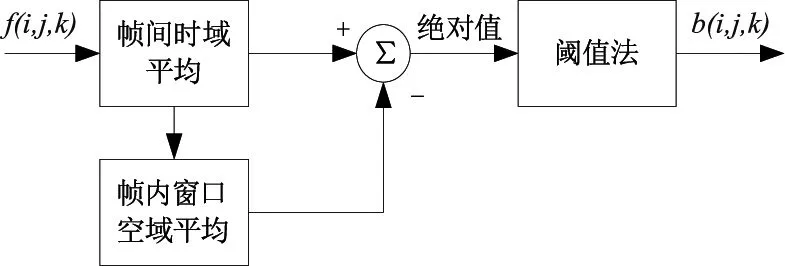
图2 TMOE算法框图
2.2 TMOE算法存在问题
由于IRFPA属于大面阵的探测器,探测单元数目庞大,难免会产生一部分连续盲元[8],连续盲元的尺寸较大,采用窗口下滤波类算法无法滤除,滤波后仍会在图像上留下白点,如图1(b)所示,中值滤波器只滤除了平均图像中的离散盲元点和部分盲元块,这样就会导致在差值图像中丢失部分盲元块,最终造成盲元的漏检。差值图像如图1(c)所示。
2.3 本文盲元检测算法
本文对TMOE算法进行改进,先对连续红外图像序列取时域平均,然后对窗口下的盲元分布形式进行分类讨论,采用中值滤波滤除离散的盲元点,采用对平均图像求全局空域均值的方法滤除连续盲元,可以有效解决连续盲元的检测问题。算法流程如下:

(1)
(2)


(3)
(4)
本文得到的差值绝对值D(i,j)的图像如图1(d)所示,其三维图如图4所示,正常像素位置处的D(i,j)数值被压制的很低,接近于0。而过热像元与死像元位置处的D(i,j)表现为较为明显的高低两种突出尖峰,这样更利于采用阈值法[9]判别盲元。
(3)提取野值。设置合理的阈值Thr,若D(i,j)>Thr,则判定坐标(i,j)处为盲元。
图3 第400帧平均图像
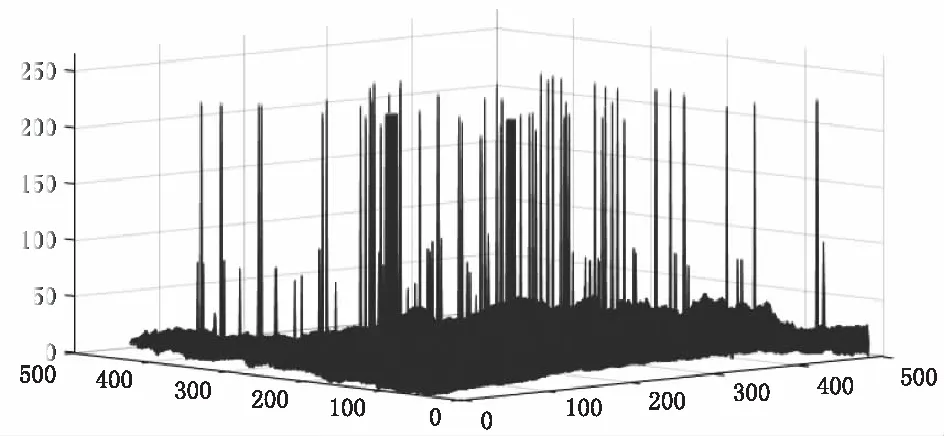
图4 差值绝对值D(i,j)
2.4 仿真实验及其结果
通过在理想图像序列的基础上人为添加盲元的方法得到500帧含盲元的图像序列。理想视频是用长波非制冷热像仪移动拍摄的房屋建筑。为了验证本文检测算法的有效性,以检测第400帧盲元图像为例,将算法应用到该含有盲元的红外图像中,并将本文算法检测效果与“3σ”算法和TMOE算法的检测效果进行比较。盲元图像如图5(a)所示,各种算法检测到的盲元集合分别如图5(b)、(c)、(d)所示,各种算法的盲元检测结果如表1所示。可以看出,“3σ”算法和TMOE算法对连续盲元的检测效果较差,本文算法的盲元检测率较高,对连续盲元的检测效果较为理想,即本文算法可以有效地实现盲元检测。
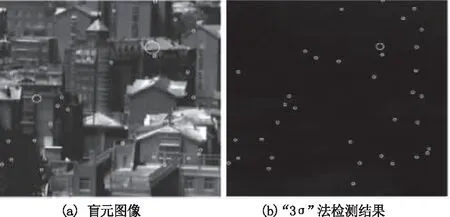
图5 盲元检测结果
算法结果对比数据如表1所示。

表1 算法结果对比
3 红外探测器盲元测试
由于红外探测器产生的盲元现象直接通过所成的图像反映出来,因此可根据图像中的盲元情况判断红外探测器的盲元情况。红外图像中盲元的数量和盲元的分布会影响到红外目标的检测与识别,对于红外图像较明显的盲元,可以看出图像盲元现象严重,视觉对比明显。但在实际测试中这种结果并不是那么容易出现,对盲元现象轻微不够明显、视觉对比不强烈的情形进行判别,就需要一个确定的量化评价指标来判断图像盲元的严重程度。因此需要建立评价指标与评价准则对图像中的盲元进行评价,从而判断红外成像设备能否继续正常工作。
3.1 罗曼诺夫斯基准则[10]的应用
评价指标的建立是基于罗曼诺夫斯基准则对粗大误差的判别思想,来做出对图像盲元程度的判别。假设前n次测量都是正常的,则有:
设有n个样本测量值为x1,x2,…,xn,假设测量值xn+1为可疑数据,计算前n项平均值为:
(5)
并求得测量列的标准差:
(6)
由n和显著度α查表2可得检验系数K(n,α)。若:
(7)
(8)
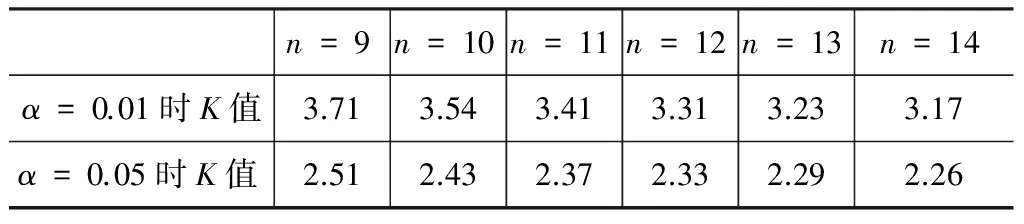
表2 t分布表
3.2 红外成像设备盲元测试
3.2.1 测试原理
盲元测试是在实验室通过判断红外成像设备所成的方形靶标图像的盲元情况来判断红外成像设备的盲元情况。选择靶标为温度可调节,且可以在任一温度下保持恒定状态,即靶标所成图像是均匀背景图像。控制靶标在四个不同温度,分别在每个温度下捕捉待测试设备所成图像,通过图像采集卡获取这四幅图像,利用计算机对图像进行处理,流程如图6所示。
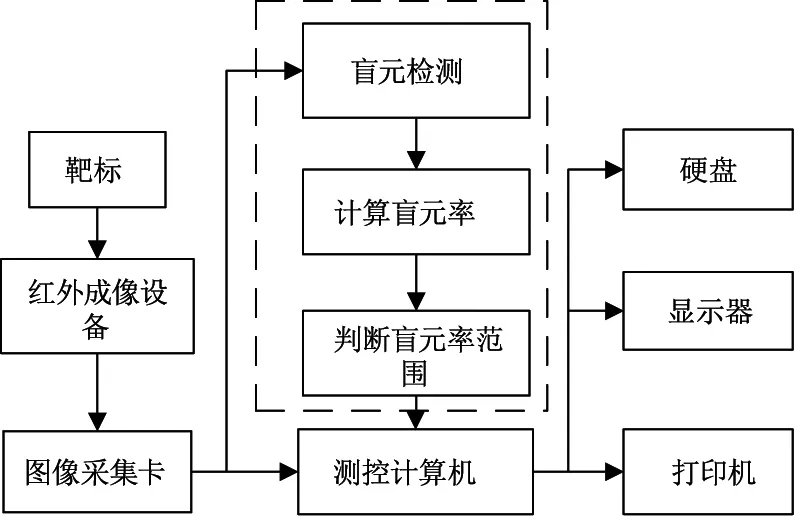
图6 盲元测试流程图
测试过程分为三步:
(1)将靶标设定四个温度,分别获取待测设备所成红外图像;
(2)对图像进行盲元检测,计算盲元率;
(3)计算四幅图像盲元率均值,判断成像设备的盲元程度。
3.2.2 盲元检测
采用2.3节提出的盲元检测算法对正常工作的红外成像设备进行盲元检测,统计盲元个数,计算盲元率,过程如下:
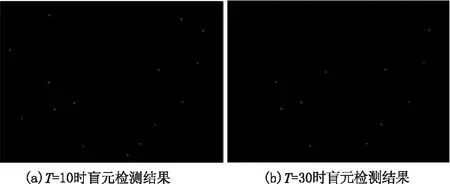

图7 不同温度下盲元检测结果
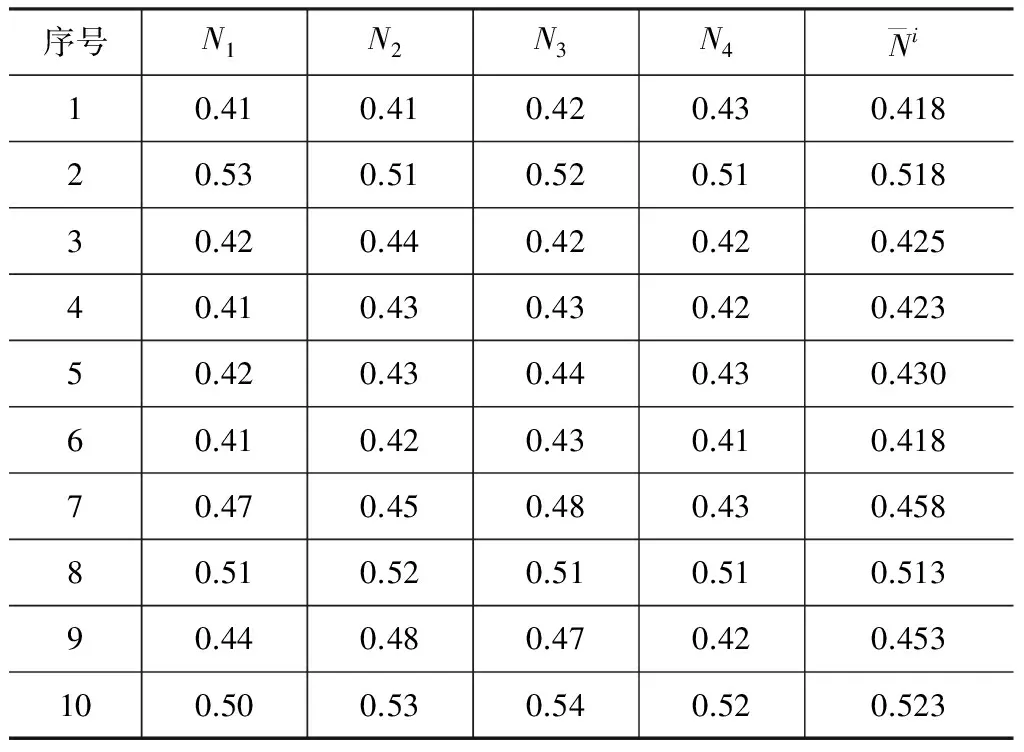
序号N1N2N3N4Ni10.410.410.420.430.41820.530.510.520.510.51830.420.440.420.420.42540.410.430.430.420.42350.420.430.440.430.43060.410.420.430.410.41870.470.450.480.430.45880.510.520.510.510.51390.440.480.470.420.453100.500.530.540.520.523
3.2.3 评价准则与评价指标的建立


由式(8)判定Nn+1值,即:
可求得:
Nn+1>0.565
(9)
即待测设备红外成像的盲元率满足式(9)时,可判定该红外成像设备不达标。
3.3 对几种特殊分布盲元的讨论
3.2节研究了红外成像设备盲元测试技术,通过对红外图像进行盲元检测,计算出盲元率,并与评价指标相比较,从而判别红外成像设备的盲元程度,进而判断红外成像设备能否继续使用,方法简便快捷,有较高的准确度。当然该方法也有其局限性,不适用于下面几种特殊情况。
(1)IRFPA中间存在块状盲元、线形盲元或盲元集中的情况,如图8(a)、(b)、(c)所示。
(2)IRFPA边缘存在盲元的情况,如图8(d)所示。

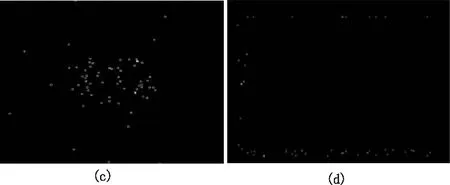
图8 几种特殊分布形式盲元
第一种特殊情况主要是针对红外弱小目标,或者红外目标与红外成像系统相距较远,此时红外目标被完全压缩在红外图像的几个分辨单元内。由文献[11]得出的结论:当捕获概率为50%时目标图像占有的像素数为(4±1)个,当捕获概率为90%时目标图像占有的像素数为(6±1)个,因此捕获目标时,其最小像素不能小于3个,最佳捕获目标图像为5个到7个像素,小于这个最佳个数,捕获目标概率就会相当低。如果IRFPA中间存在连续盲元,则很有可能将目标掩盖,将会影响红外制导武器对目标的检测;对于第二种特殊情况,因为红外目标出现在红外探测器搜索试场的中心,所以IRFPA边缘的盲元基本不会影响到对目标的检测与识别。在这两种情况下不管待测成像设备的盲元率是否满足评价准则,都要单独对其进行判断。
4 结 语
针对红外制导武器探测器存在盲元的问题,本文对TMOE盲元检测算法进行了改进,对滤波窗口下的盲元分布形式进行了讨论,对连续盲元提出基于时域平均和空域均值野值提取的盲元检测算法,对连续盲元具有较好的检测效果,实现了盲元位置的确定,并通过仿真实验,验证了本文检测算法的有效性和合理性。通过对红外成像设备成像中盲元的不同类型及其分布特点进行了归纳汇总,找出了表征图像盲元程度的参量,即盲元率,并从统计学角度出发,根据罗曼诺夫斯基准则,提出了红外成像系统盲元的测试方法,建立红外成像设备盲元程度的评价准则和评价指标。
参考文献:
[1] XU Shiwei,WEI Dong,WANG Dapeng,et al.Blind pixel detection and compensation for infrared liner detector[J].Infrared and Laser Engineering,2014,43(11):3621-3626.(in Chinese)
徐世伟,魏东,王大鹏,等.红外线阵探测器盲元定位与补偿[J].红外与激光工程,2014,43(11):3621-3626.
[2] REN Jianle,CHEN Qian,QIAN Weixian,et al.Mu-ltiframe registration based adaptive nonuniformity correction algorithm for infrared focal plane arrays[J].J.Infrared Millim.Waves,2014,33(2):122-128.
[3] LENG Hangong,GONG Zhendong,XIE Qingsheng,et al.Adaptive blind pixel detection and compensation for IRFPA based on fuzzy median filter[J].Infrared and Laser Engineering,2015,44(3):821-826.(in Chinese)
冷寒冰,宫振东,谢庆胜,等.基于模糊中值的IRFPA自适应盲元检测与补偿[J].红外与激光工程,2015,44(3):821-826.
[4] AN Guangqi,ZHAO Yan,ZHANG Haifeng.Blind pixel detection and compensation on infrared detector[J].Aero Weaponry,2016,3(12):54-58.(in Chinese)
安广齐,赵剡,张海峰.红外探测器盲元检测及补偿[J].航空兵器,2016,3(12):54-58.
[5] KAN Bohan,YIN Jinjian,LI Lingjie,et al.IR blind pixels detection algorithm based on adjustable threshold window[J].Laser & Infrared,2014,44(8):949-952.(in Chinese)
阚博涵,殷金坚,李凌杰,等.基于可调阈值窗口的红外盲元检测算法[J].激光与红外,2014,44(8):949-952.
[6] ZHANG Honghui,LUO Haibo,YU Xinrong,et al.Blind-pixel detection algorithm for IRFPA by applying pixel′s characteristics histogram analysis[J].Infrared and Laser Engineering,2014,43(6):1807-1811.(in Chinese)
张红辉,罗海波,余新荣,等.采用特征直方图的红外焦平面阵列盲元检测方法[J].红外与激光工程,2014,43(6):1807-1811.
[7] LI Zhaolong,HAN Yulong.Blind pixel detection and correction of IR imaging based on scene[J].Laser & Infrared,2017,47(4):465-469.(in Chinese)
李召龙,韩玉龙.基于场景的红外成像系统盲元检测及校正[J].激光与红外,2017,47(4):465-469.
[8] HAO Lichao,HUANG Aibo,LAI Canxiong,et al.Discussion of reliability analysis on IRFPA by bad pixel[J].Infrared and Laser Engineering,2016,45(12):0504004.(in Chinese)
郝立超,黄爱波,赖灿雄,等.盲元作为红外焦平面可靠性分析手段的探讨[J].红外与激光工程,2016,45(12):0504004.
[9] LI Zhaolong,Shen Tongsheng,Lou Shuli.Scene based nonuniformity correction based on bilateral filter with reduced ghosting[J].Infrared Physics & Technology,2016,77:360-365.
[10] LV Junwei,CHEN Yuhua,SONG Qingshan.Method of distortion of infrared equipments imaging based on image processing[J].Journal of Ordnance Equipment Engineering,2016,37(1):9-14.(in Chinese)
吕俊伟,陈玉华,宋庆善.基于图像处理的红外成像设备畸变检测方法[J].兵器装备工程学报,2016,37(1):9-14.
[11] LV Junwei,HE Youjin,HAN Yanli.Principle of photoelectric tracking measurement[M].Beijing:National Defense Industry Press,2010:148-149.(in Chinese)
吕俊伟,何友金,韩艳丽.光电跟踪测量原理[M].北京:国防工业出版社,2010:148-149.
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
作文小学中年级(2020年6期)2020-07-24
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
小学科学(2019年12期)2019-01-06
太空探索(2014年9期)2014-07-10
