基于无人机的施工扬尘污染源自动监测系统设计与实现
2018-03-09 06:44:59马国鑫陆建飞姚佳玥尤少迪
中国环境监测 2018年1期
马国鑫,韩 豫,陆建飞,姚佳玥,尤少迪
1.江苏大学土木工程与力学学院,江苏 镇江 212013 2.澳洲国立大学国家信息通信技术中心,澳大利亚 堪培拉 2600
施工扬尘是由露天施工活动产生,对生态环境和人体健康危害极大,其对城市PM2.5污染贡献率可达13.1%[1],也是大气污染物PM10的主要来源之一[2]。各地政府对此均高度重视,出台了一系列扬尘污染监测的方针和政策。然而,目前施工扬尘污染监测依靠人工巡查和定点监测,效率不高且效果欠佳,缺乏更有效的监测技术手段。因此,探索更为有效的监测方法,对大气污染的治理具有重要意义。
目前,施工环境监测主要关注施工现场的扬尘、材料废弃物等[3-4],其中,施工扬尘管控是研究热点[5]。监测方式方面,仪器采样是最主要方式,还可通过视频监测[6-8]。然而,上述方法虽精度较高,但易受干扰,效率不高。近年来,无人机采集图像已被用于水污染监测、化工气体污染监测、车辆识别、大厦变形监测等[9-12]。本研究以图像识别技术为核心支撑,设计了基于无人机的施工扬尘污染源自动监测系统,并对系统进行了测试。
1 系统需求与支撑技术
施工现场的复杂性和特殊性,导致施工环境监督和管理工作面广量大,因而带来的安全问题也是关注的重点。为此,根据问题的特点及技术的匹配性,采用无人机技术和图像识别技术作为主要支撑。
1.1 无人机技术
无人机作为图像采集的载体,具有监测范围广、效率高、环境适应能力强等优势,可满足上述任务要求。与人工监测相比,可极大地减少安全事故的发生。
1.2 图像识别技术
图像识别作为污染源识别的核心技术,具有低成本、智能、高效等优势。与人工识别相比,可准确、自动地识别广域内的施工扬尘污染源。
2 系统架构
2.1 系统功能模块与硬件构成
本系统各子模块及主要功能:
1)图像采集模块。采集施工扬尘污染源监测区域图像。
2)图像预处理及拼接模块。实现图像初筛、校正、平滑、增强,完成图像拼接。
3)边缘检测模块。提取图像边缘,合并类似区域。
4)存在性检测及复核模块。提取疑似污染源区域,并人工复核。
5)污染源特征提取模块。提取图像的RGB(红色Red,绿色Green,蓝色Blue)三通道值,并绘制相应的颜色直方图。
6)污染源特征比对模块。确定污染源像素数目、种类、面积。
7)污染源分布分析及输出模块。实现污染源分布情况的可视化,显示污染源分布图。
2.2 系统运行流程
本系统具体运行流程包括图像采集、特征分析和结果输出。
2.2.1 图像采集
根据施工场地地理特征和施工特点,网格化划分作业区域,确定图像采集点和采样方式,并控制无人机按照飞行路线进行图像采集,见图1。
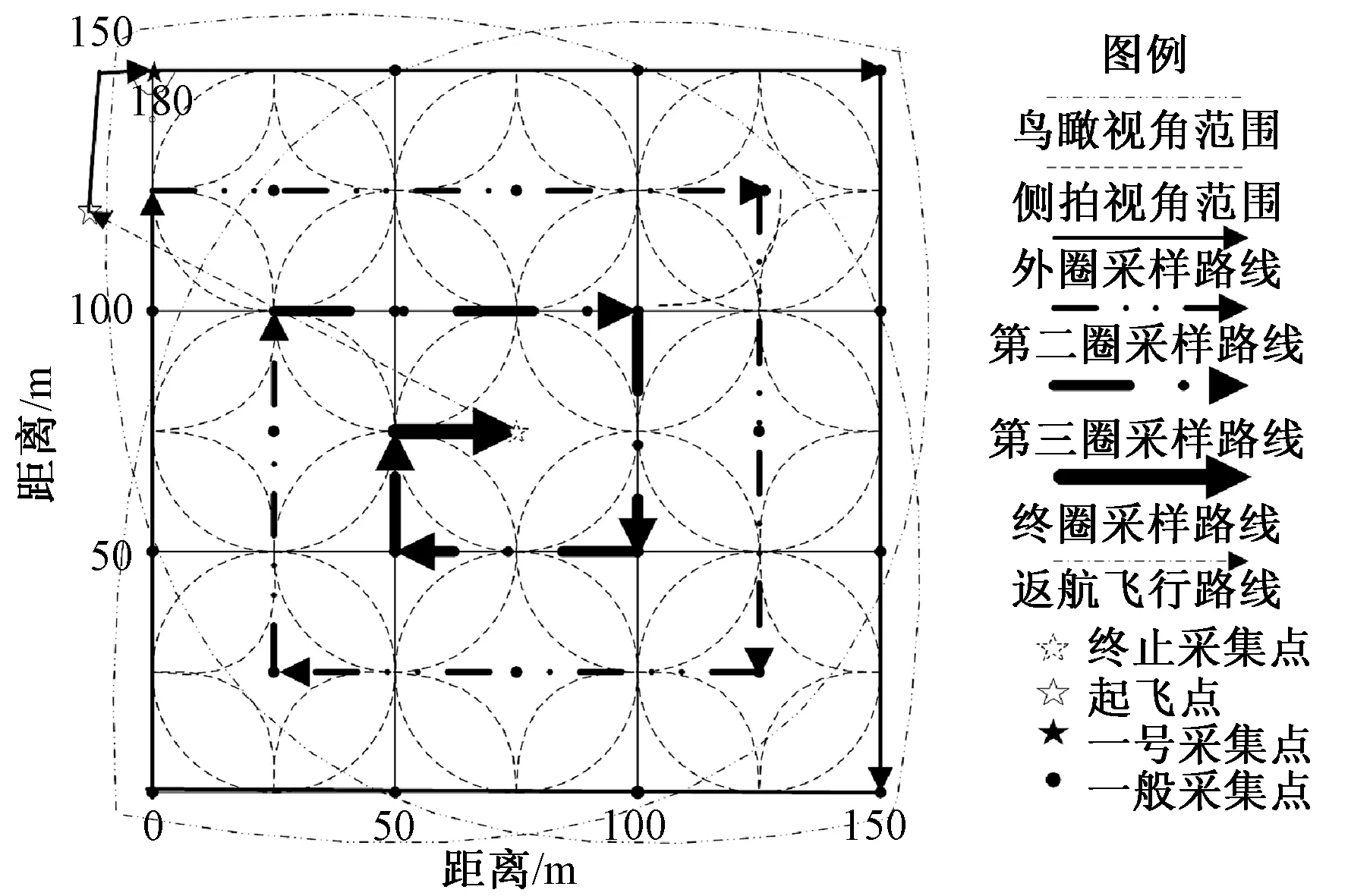
图1 无人机路线及采集点设置Fig.1 UAV flying routes and image acquisition points
图像采集方式:
在外圈各点(除四角点)及内网格点采用固定俯拍、三连拍的方式,且相机与地面呈90°;在最外圈四角点,采用鸟瞰方式旋转90°拍摄、三连拍,相机与地面呈90°。
2.2.2 特征分析
1)图像预处理。先畸变、正射校正完成初筛的图像,再使用Gabor滤波法平滑图像,继而使用灰度变换法增强图像颜色饱和度。
2)污染源图像拼接。使用RGB特征相关的拼接算法,实现监测区域俯拍图像的自动拼接。
3)图像边缘检测。使用Canny边缘检测算法提取区域边缘,实现图像中类似区域的合并。
4)存在性检验及复核。使用HSV(色调Hue,饱和度Saturation,明度Value)特征识别算法识别污染源疑似区域,并人工复核。
5)污染源特征提取。使用直方图法提取标准和疑似污染源图像的RGB值。
6)污染源特征比对。使用颜色直方图对比识别污染源种类,并根据像素点数目计算污染源面积。
2.2.3 结果输出
根据分析结果,分别使用红、橙、绿标注拆迁工地、裸土、已覆盖区域,按照污染源面积占比划分污染严重程度,显示污染源分布图。
3 核心算法
3.1 施工扬尘污染源存在性检验方法
RGB和HSV是2类颜色模型,前者使用一个三维空间中的点来表示一种颜色,可由三个分量形成的正方体表示,主要用于色彩的精确记录;后者是根据颜色的直观特性创建的一种颜色空间,可由一个六角锥体模型进行描述,在颜色对比方面具有优势。
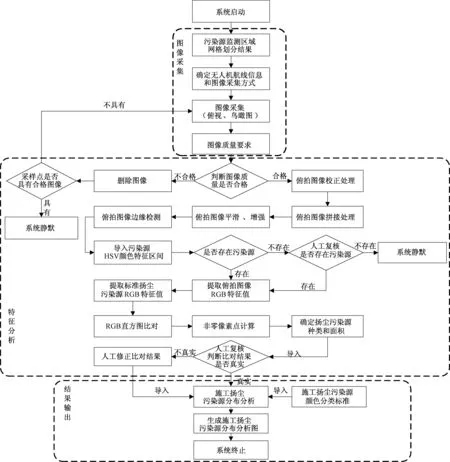
图2 系统运行流程图Fig.2 System operation flow
鉴于HSV空间的优势,使用RGB2HSV和BGR2HSV函数,实现污染源图像从RGB颜色空间向HSV颜色空间转换。
首先,人工确定并采集标准污染源的图像,并提取标准污染源的HSV和RGB特征。据此设定污染源的H、S、V区间值,使用矢量函数识别图像中同时处于H、S、V 3个阈值中的像素点。最后,对图像进行直方图均衡化处理,增强图像对比度。由于在图像识别过程中,读取的图像为彩色图像,而直方图均衡化需在HSV空间进行,因此,使用equalizeHist、imgThresholded、merge等函数进行图像变换,提取图像中的疑似污染源区域。
3.2 施工扬尘污染源面积计算方法
施工扬尘污染源的面积是衡量污染严重程度的重要指标,在这一步骤中,通过计算图像中疑似污染源像素点数目实现污染源面积计算。此过程分为图像采集和图像处理阶段。
图像采集阶段:在平坦的地面设置1 m×1 m且与地面颜色有明显差异的参照物,再控制无人机在固定高度采集参照物图像,高度和采集方式与污染源图像采集时一致。
图像处理阶段:使用Canny函数提取参照物的轮廓,并使用coutourArea函数计算参照物轮廓内面积,即为100 m高度处1 m2参照物的像素点数目X。由于大面积的污染源区域对于环境的影响较大,故将大于50 000像素点的区域个数作为衡量污染严重性的标准。
然后,使用RGB2GR、RGBA2GRAY函数将污染源的RGB图像强制转化为灰度图像,再使用threshold函数二值化图像,并调用bSums函数统计非零像素点数目Y,计算污染源面积S=Y/X。
3.3 施工扬尘污染源特征比对方法
通过对比标准污染源和疑似污染源图像的RGB三通道直方图,判定污染源种类。
先使用split函数将图像分割为RGB三通道图像,设定bin数目和取值范围,继而使用calcHist函数计算图像颜色直方图,并使用normalize函数实现直方图归一化。最后选择衡量直方图相似度的对比标准,再使用compareHist函数计算直方图相似度。其中,compareHist函数提供了4个统计直方图相似度衡量标准,分别为相关系数法、卡方相似法、直方图相交法和巴氏距离法,在系统测试中将会做出适用性比较。
4 系统实现与测试
4.1 系统实现
4.1.1 硬件实现平台
本系统以航拍四轴旋翼飞行器为图像采集工具,还包含计算机、安装无人机操控软件的移动设备。
4.1.2 软件实现
本系统基于Visual Studio 2013平台,将OpenCV视觉库作为图像处理的核心。Visual Studio 2013平台可兼容C++、C等多种计算机语言,程序编写简便。OpenCV Library(Open Source Computer Vision Library,开源计算机视觉库)作为一个开源的跨平台视觉库,能提供大量图像处理的通用算法。
4.1.3 测试实现环境
为检验系统性能,对系统进行测试。将施工现场不同阶段采集的图像作为系统测试的对象。测试所使用的计算机配置为Intel core i5-3470 3.20 GHz处理器,16 GB RAM,Windows 7 64 bit操作系统,NVIDIA GeForce GTX 650 Ti显卡,同时配置Visual Studio 2013、Matlab 2015b以及OpenCV2.4.9环境。
4.2 系统测试
利用上述方法、硬件、软件及配置环境,进行系统测试。
4.2.1 施工扬尘污染源特征提取
人工采集与监测区域条件相同的标准扬尘污染源的图像,使用颜色直方图提取方法,提取标准施工扬尘污染源的RGB颜色特征,如图3所示。
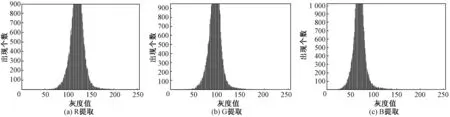
图3 标准污染源RGB颜色直方图提取Fig.3 Extraction of standard pollution RGB histogram
4.2.2 施工扬尘污染源存在性检验
根据提取结果,使用RGB2HSV函数实现图像从RGB颜色空间到HSV颜色空间的转换。设置HSV的阈值为H(15, 20)、S(80, 150)、V(0,255),并分别对3 000×4 000 ppi(每英寸的像素点数目,下同)和300×400 ppi的图像进行污染源特征提取。
经实验和分析发现,施工扬尘污染源存在性检验效果良好,系统运行时间受图像像素影响较大,相同像素大小的图像处理时间相差不大。
4.2.3 施工扬尘污染源面积计算
根据存在性检验的结果,使用非零像素点计算方法,计算图像中疑似施工扬尘污染源的像素点数目,并依据飞行高度设定判断阈值,判定污染源是否超标。在本次系统测试中,无人机的飞行高度设置为100 m,若图像中同一区域像素点数目超过50 000,即判定裸土超标,测试结果见表1。
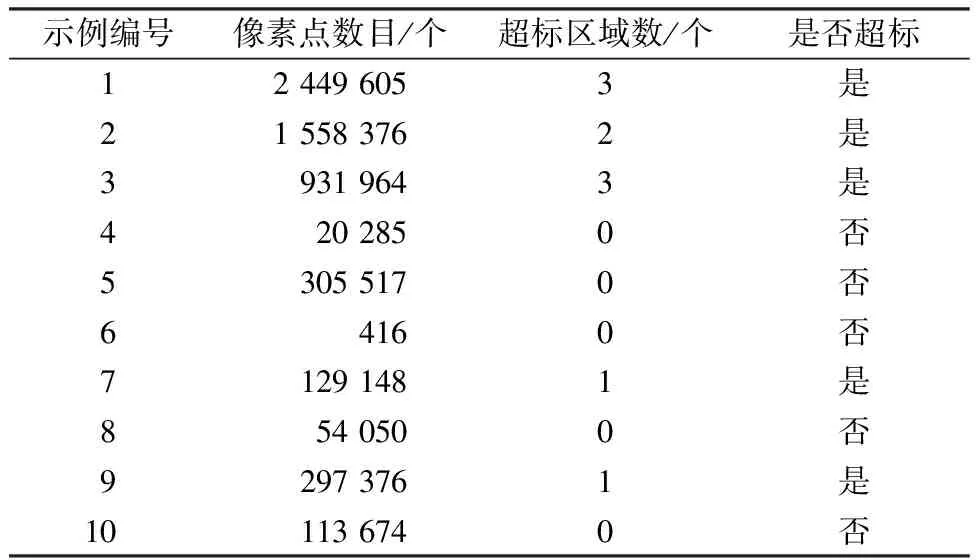
表1 污染源图像像素点计算和污染源超标判定
测试结果表明,示例1、2、3、7、9均存在污染源超标情况。
4.2.4 施工扬尘污染源特征比对
基于OpenCV视觉库,使用直方图对比方法进行施工扬尘污染源特征比对。先统一疑似污染源图像尺寸为200×150 ppi,再根据污染源特征提取结果,对比标准污染源和疑似污染源图像RGB三通道直方图,比对结果见表2。
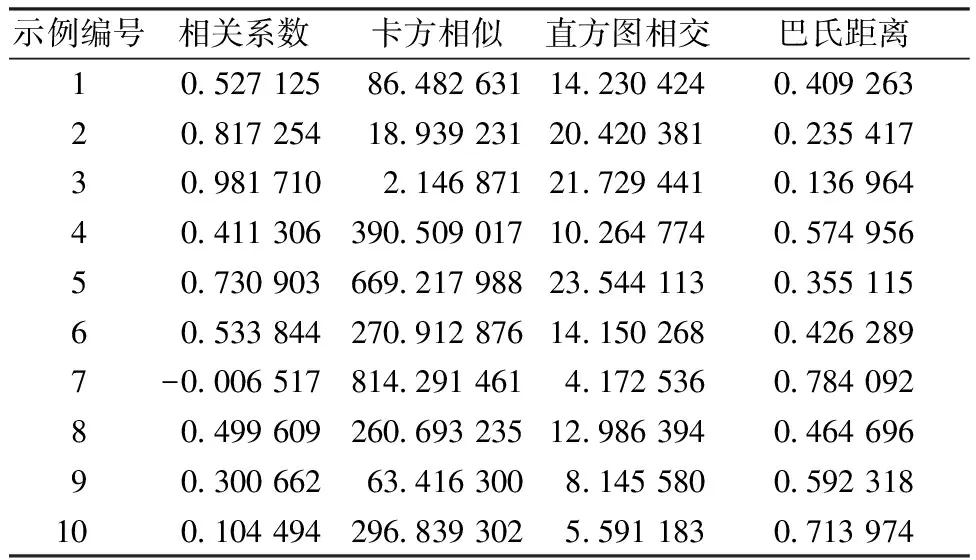
表2 施工扬尘污染源特征比对结果
测试结果表明:以相关系数法作为评判标准较为理想,示例1、2、3、4、5、6与选取的标准污染源种类近似,示例7、9、10中的污染源种类与选取的标准污染源种类相似度不高,其中示例2、3、5的污染源种类与标准污染源种类相似程度较高。
5 讨论
根据系统测试结果,分析系统3个主要流程,找出系统优势及不足,进一步完善本系统。
1)施工扬尘污染源存在性检验。施工扬尘污染源存在性检验用于提取污染源区域图像中疑似污染源的部分,是监测的前提和基础。人工采集标准施工扬尘污染源,对100个图像进行了系统测试。测试发现,污染源存在性检验的正确率为71%。在此过程中,因光线强弱不一导致的图像明暗问题对污染源特征的提取有一定的影响,另外,与标准污染源HSV特征类似的物体也会导致提取错误。对此,在无人机采集图像时,需考虑天气的影响,避免因光线强弱导致的图像明暗不一。在污染源特征提取完成之后,应加强人工复核。
2)施工扬尘污染源面积计算。施工扬尘污染源面积计算用于衡量污染严重程度,为确定监测及处罚力度提供依据。测试发现,污染源面积计算效果较好,但受污染源提取准确率影响较大。因小范围的裸土对于环境的影响并不大,因此,可忽略小面积裸土,注重成片裸土的影响。对此,应注重像素点阈值的设置、图像采集高度与像素点阈值的关系。
3)施工扬尘污染源特征比对。施工扬尘污染源特征比对是确定污染源种类的重要依据,同时也为污染扩散规律的研究提供参考依据。用该法对识别出的具有疑似污染源特征的图像进行了系统测试,发现污染源特征比对效率较好,相对稳定。在此过程中,分别进行污染源RGB三通道直方图对比,污染源的明暗程度对于比对的效果影响程度较大,同时,受前期污染源特征提取的效果影响较大。考虑到比对过程中像素点的数目问题,重新调整了图像的像素,可能会对比对的结果产生一定影响。因此,仍需进一步提高比对的准确性,减少不必要的干扰。
6 结论
设计了一种施工扬尘污染源自动监测系统。该系统通过无人机采集施工扬尘污染源区域的图像,使用图像识别技术实现监测区域内施工扬尘污染源的自动识别,具有操作简单、成本低廉、监测面积大的优势,弥补了传统施工环境监测领域自动化水平不高的不足。
经测试,本系统污染源存在性检验正确率为71%,污染源面积计算效率较高,污染源特征比对效果相对稳定。该系统具有操作简单、成本低廉的优势,可识别施工现场、运输车辆内裸土等污染源,基本满足污染源监测的要求。
未来将通过统一光照强度、进行人工复核提高污染源存在性检验的效率,减少失误率。但是,污染源特征的比对效果依赖像素值的设置,在后续研究中将就比对方法进行进一步研究,以完善本系统。
[1] 李铭煊, 秦玮, 杭怡春,等. 北京昌平某地冬季大气PM2.5元素污染特征分析[J]. 中国环境监测, 2016, 32(3):58-63.
LI Mingxuan, QIN Wei, HANG Yichun, et al. Study on the Pollution Characteristics of Particulate Matter Based on the Characteristic Elements in Changping of Beijing[J]. Environmental Monitoring in China, 2016,32(3):58-63.
[2] 许丹丹, 屈晓萍, 汪伟峰,等. 宁波PM10中有机碳和元素碳的季节变化及来源分析[J]. 中国环境监测, 2014, 30(1):49-52.
XU Dandan, QU Xiaoping, WANG Weifeng, et al. Characteristics of Organic and Elemental Carbon in PM10in Ningbo and Source Analysis[J]. Environmental Monitoring in China,2014, 30(1):49-52.
[3] 吕晓光. 建筑工程施工阶段环境管理研究[D]. 天津:天津大学, 2012.
[4] KOHLMAN-RABBANI E R, SHAPIRA A, MARTINS A R B, et al. Characterization and Evaluation of Dust on Building Construction Sites in Brazil[J]. Neurochemistry International, 2014, 5(1):1-8.
[5] 黄天健, 李小冬, 苏舒,等. 建筑工程土方施工阶段扬尘污染监测与分析[J]. 安全与环境学报, 2014, 14(3):317-320.
HUANG Tianjian, LI Xiaodong, SU Shu. Monitoring and Control of the Dust Pollution on the Construction Site During the Earthwork Construction Stage[J]. Journal of Safety and Environment, 2014,14(3): 317-320.
[6] 赵晨阳. 建筑施工扬尘监测与危害程度评价研究[D]. 北京:首都经济贸易大学, 2015.
[7] WU Z, ZHANG X, WU M. Mitigating Construction Dust Pollution: State of the Art and the Way Forward[J]. Journal of Cleaner Production, 2015, 112:1 658-1 666.
[8] 徐谦, 李令军, 赵文慧,等. 北京市建筑施工裸地的空间分布及扬尘效应[J]. 中国环境监测, 2015, 31(5):78-85.
XU Qian, LI Lingjun, ZHAO Wenhui, et al. Spatial Distribution of Building Sites and Related Emissions of Particulate Across Beijing[J]. Environmental Monitoring in China, 2015, 31(5):78-85.
[9] 洪运富, 杨海军, 李营,等. 水源地污染源无人机遥感监测[J]. 中国环境监测, 2015, 31(5):163-166.
HONG Yunfu, YANG Haijun, LI Ying, et al. Monitoring of Water Source using Unmanned Aerial Vehicle Remote Sensing Technology[J]. Environmental Monitoring in China, 2015,31(5): 163-166.
[10] 杨海军, 黄耀欢. 化工污染气体无人机遥感监测[J]. 地球信息科学学报, 2015, 17(10):1 269-1 274.
YANG Haijun, HUANG Yaohuan. Evaluating Atmospheric Pollution of Chemical Plant Based on Unmanned Aircraft Vehicle[J]. Journal of Geo-Information Science, 2015, 17(10):1 269-1 274.
[11] WANG L, CHEN F, YIN H. Detecting and Tracking Vehicles in Traffic by Unmanned Aerial Vehicles [EB/OL]. (2016-05-01) [2016-10-01].http://www.sciencedirect.com/science/article/pii/S09265805163 00887.
[12] CHEN B, CHEN Z, DENG L. Building Change Detection with RGB-D Map Generated from UAV Images[J]. Neurocomputing, 2016, 208:350-364.
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
环境影响评价(2020年2期)2020-12-02 01:23:24
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
电脑知识与技术(2018年35期)2018-02-27 13:29:44
环境保护与循环经济(2017年4期)2018-01-22 03:27:18
中国资源综合利用(2017年4期)2018-01-22 02:46:45
中学生数理化·八年级物理人教版(2017年12期)2017-04-18 12:59:46
自动化学报(2017年11期)2017-04-04 02:52:44
计算机工程(2015年8期)2015-07-03 12:20:21