
深远海养殖装备技术研究现状与发展趋势
2018-03-07 08:50:11闫国琦倪小辉莫嘉嗣
大连海洋大学学报 2018年1期
闫国琦,倪小辉,莫嘉嗣
(华南农业大学工程学院,广东广州510642)
改革开放以来,中国海洋水产养殖业受市场需求、养殖装备技术发展和国家政策等因素的推动,得到了快速发展。然而长期在近海水域的高密度养殖加速了海水污染,水质恶化,水产品质量下降,导致浅水网箱养殖业面临发展瓶颈。国家在 “十二五”期间提出的 “关心海洋、认识海洋、经略海洋”,以及在 “十三五”规划中提出 “发展海洋经济,科学开发海洋资源,保护海洋生态环境”的全国海洋经济发展战略,对中国乃至其他国家深海养殖业的可持续发展有着指导性意义[1-2]。本研究中,主要对深海网箱养殖及其装备技术的研究进展进行了分析与讨论,旨在为海水养殖业的健康发展提供参考依据。
1 深海网箱
20世纪70年代开始,深海网箱养殖技术因生产效益好、环境污染小、水产品质量好等优点,促进了网箱养殖的快速发展,得到沿海国家高度关注与重视。随着科技发展,新材料的开发利用,进一步提高了网箱在海水中抗老化、抗扭曲、抗冲击等性能。国外典型深海网箱有挪威AKVA公司HDPE圆形网箱、日本的浮绳式网箱和美国的碟形网箱。
国内外网箱的研究进展有如下特点:(1)网箱容积朝大型化发展。国外先进的深海网箱养殖系统,依靠现代化科技,正朝大型化、规模化发展。挪威的HDPE圆形网箱最大容积为40 000 m3,最大网箱周长为80~160 m,深度为20 m,单个网箱产量为1000 t。网箱尺寸以及养殖规模增大,有利于提高养殖企业的经济效益[3]。 (2)抗台风、海浪能力增强。挪威的HDPE圆形网箱能承受5 m高的海浪冲击和12级的风力[4-5]。美国的碟形网箱,抗流能力强,在流速为2~3 kN的冲击下,箱体也不发生变型[6]。以色列的柔性网箱能承受15 m的高台风与海浪冲击,被用于水深60 m的深海养殖[7]。 (3)高新科技、高新材料的发展与应用。金属网衣材质的铜合金以及锌铝合金网箱,具有抗菌、耐腐蚀性能,能有效防止网衣附着物的生长。使用防污涂料以及防污损技术,可以延长网箱的使用寿命[8-12]。 (4)网箱水动力特性与数值模拟研究。陈昌平等[13]进行了水流作用下网衣的流固耦合计算,研究了金属网衣多孔小直径网状结构的水动力响应特性。董国海等[14]对在波流逆向和波流同向作用下,重力式网箱的受力、运动和网衣变形进行了数值模拟研究。
中国网箱养殖业从20世纪70年代起开始发展,网箱大多数由松木板和竹竿材质制成,网箱容积小、抗风浪性能差、使用周期短[15]。1998年,海南省第一次从挪威引进8只抗风浪柔性圆柱形网箱,开创了中国大型网箱养殖业的先河,但这些不能较好地适应中国海域的养殖环境且网箱价格昂贵。因此,必须自主研发适应中国养殖环境的网箱,并逐渐形成中国独特的养殖体系[16-17]。2002年,中国研制出第一套具有自主知识产权的全国产业化HDPE双浮管升降式深水网箱。2008年,海南省初步实现了网箱养殖的规模化、产业化[3]。“十二五”期间,徐皓等[18]设计建立10万t级船体平台,提出了 “养-捕-加”一体化深远海 “深蓝渔业”发展模式。中国海南、珠海、山东等沿海地区养殖业发展迅速,海南近几年加大对深海养殖业的补贴扶持力度,鼓励养殖户由传统的近海养殖向深远海网箱养殖转变,2015年6月海南深水网箱数量达3548只,并计划 “十三五”末达1.4万只,实现年总产量约14万t,产值约50亿元[19-20]。
深海网箱养殖是渔业转方向调结构的重要方式,有利于深海养殖业的可持续发展,有利于缓解近海养殖压力和减轻环境污染。目前,国内深水网箱养殖业发展缓慢,网箱的性能、使用寿命和配套装备与国外相比有较大差距,今后需加大经济投入,提高深水网箱的科研力度,实现国内深海养殖模式的快速转变。
深海网箱养殖的发展趋势总结为: (1)网箱设施呈大型化发展,向促进海洋养殖业的规模化、工业化方向发展; (2)网箱设施结构可靠、安全性强,对深海网箱抗风浪能力和耐流特性进行系统的水动力特性研究,可减小网箱变形,提高抗风浪能力; (3)采用自动化、智能化配套装备技术,推进深海网箱养殖业的快速发展。
2 自动投饵装备技术
深海网箱自动投饵装备是利用计算机技术、自动化与机电一体化技术、环境与养殖技术等,运用水下摄像机对网箱内鱼类生长情况和水下环境进行实时监测,并通过计算机准确控制投饵,依据海情、鱼情数据准确给定投饵时间与数量,实现深海网箱精准化养殖[21-25]。
自动化投饵装置是制约深海网箱养殖业规模化与集约化发展的重要因素,运用水下摄像机、环境传感器、计算机等技术,实现远距离、定时、定量的精准投饵,降低劳动强度,提高经济效益。
目前,挪威、加拿大、美国、日本等国家普遍实现了自动投饵,养殖规模大大提高。国内外投饵装备的投饵方式有风送式、螺旋输送式[26],国内外研究较多的是风送式投饵装备,如挪威AKVA公司的MarinaCCS投饵系统 (图1)。投饵采用管道低压输送方式,一台风机经投饵分配器可实现多达60路远程输送,输送距离为300~1400 m,最大喂料量为648~5220 kg/h。投饵系统对风管进行散热处理,减少了饲料的损坏率;安装风力控制器,防止饲料堆积与磨损。监视系统是精准投饵的关键,运用多普勒残饵量传感器、环境传感器、喂饵摄像机,对水下环境、鱼的生长情况,以及残饵和死鱼进行监测,实现精准控制投饵量。挪威AKVA公司的养殖管理系统与投饵系统协同工作,已经全面实现了自动化、智能化控制[3]。美国ETI公司的FEEDMASTER投饵系统 (图2),基于PLC控制技术有效解决了投饵机对饵料的损伤问题,可靠性强,投饵精度高,每套投饵系统可支持24~60个饲料输送管道,最大投饵能力为250 kg/min,提高了养殖效率和管理水平[27-28]。加拿大Feeding systems公司的自动投饵系统 (图3),根据不同的养殖对象可设置不同的投饵控制软件,有效地提高了投饵系统的使用效率,并通过自动投饵系统和控制软件的协调配合,提高了饵料利用率与经济效益[27-28]。
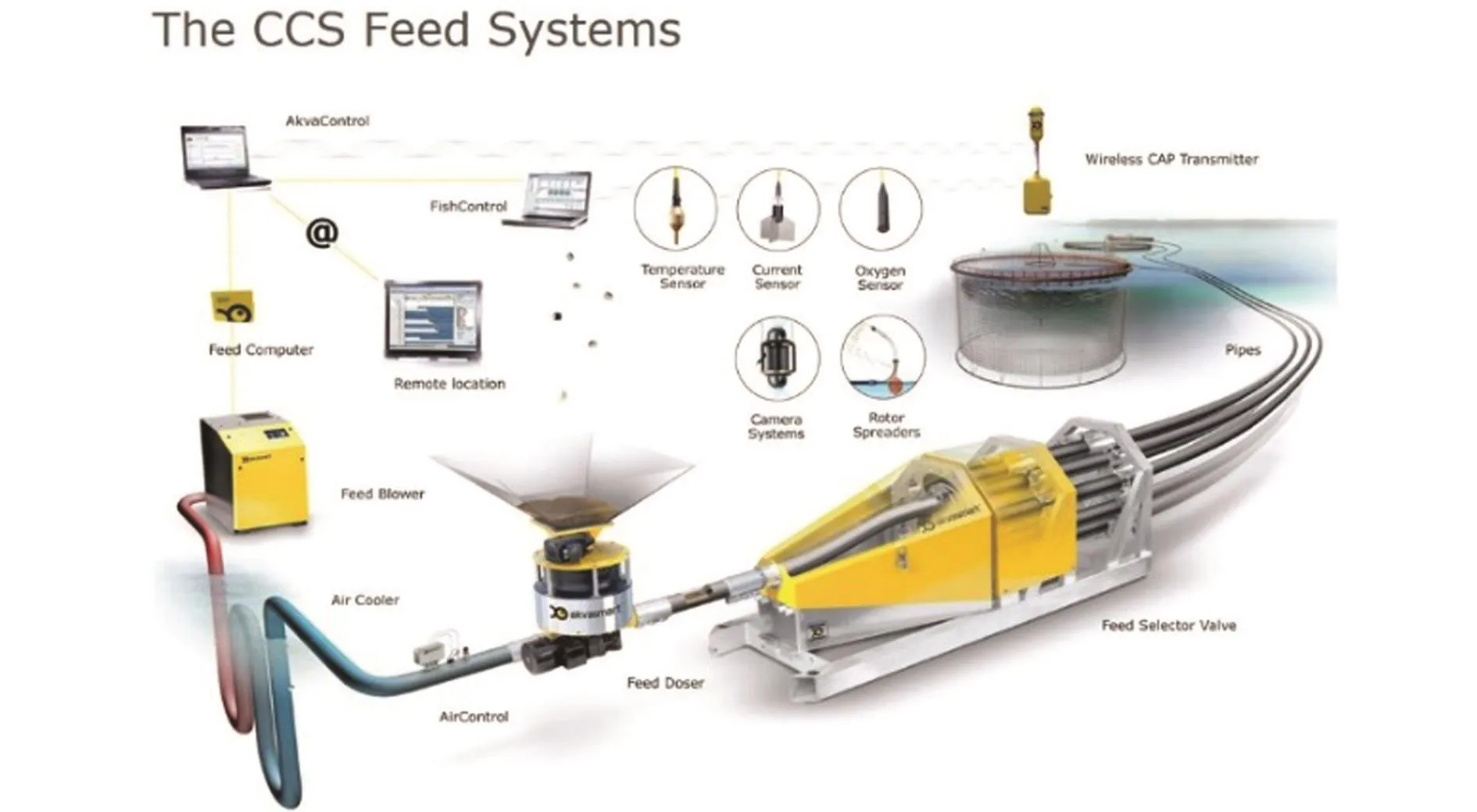
图1 AKVA公司的CCS自动投饵系统[29]Fig.1 A CCS automatic feeding system from AKVA group[29]

图2 ETI公司的FEEDMASTER投饵系统[28]Fig.2 A FEEDMASTER feeding system from ETI[28]

图3 Feeding system公司的自动投饵系统[28]Fig.3 Automatic feeding system from Feeding system[28]
国外对投饵装备的研发已较为成熟,可运用计算机技术和传感器技术研究投饵参数 (气压、质量、速度等)对养殖效率的影响。Skøien等[30]研究表明,饵料的大小、密度等均可对养殖效率产生显著影响,且饵料的大小与扩散呈正相关关系,但密度对扩散未有显著影响,此研究对投料的精确性控制具有指导意义。Papandroulakis等[31]研制了一套远程自动投饵的软硬件系统,可通过计算机控制投饵现场的各种操作。Aasa等[32]研究了风送式投饵系统中不同的饵料质量、风送速度对饵料分解的效果。Oehme等[33]研究了不同的撒料器对投饵均匀度的影响。
国内自动投饵技术还处于发展初期,面临着多项技术难题。目前,主要采用传统人力搬运投饵或半自动投饵的方式,其经济效益低,不利于深海养殖业规模化发展。当前各高校、研究院所和企业正投入大量的财力、物力研发自动投饵装备。20世纪90年代初,大连水产学院通过对国外自动投饵技术的研究,研制出了机械式对虾投饵装置[34]。本世纪初,大连海洋大学研制的可用于海洋牧场的远程监控投饵系统,以可编程以太网控制器为核心,运用自动投饵、自动放声、水下摄像、传感器和无线通讯网络等技术,解决了饵料精确投喂、音响驯化和水下视频监控等问题,实现了海洋牧场的远程控制和管理[35]。中国水产科学研究院南海水产研究所、农业部渔业装备与工程重点开放实验室分别研制了基于PLC控制的风送式自动投饵系统,能够实现定时、定量投饵[36-37]。
2009年,中国水产科学研究院南海水产研究所研发了中国第一套具有自主知识产权的深水网箱远程多路自动投饵系统,该系统融合机电工程、环境技术、养殖技术和计算机技术,促进了深海养殖的集约化管理,其投饵输送距离为300 m/h,投饵量为1200 kg/h,可供12~24路网箱投饵[38]。胡昱等[39]利用科里奥利力学原理,开发出一种不受饲料特性与重力场变化影响的自动投饵计量装置。采用DSP数字信号处理器为控制核心,并通过对扭矩与转速的测量与反馈控制,对计量误差进行了动态校正,运用PID控制方法实时控制转速,从而精确控制计量给料。该装置计量精确度可达±1%,量程范围为0~15 t/h,适合深水网箱养殖精确投饵操作和管理。张惠娣等[40]设计了基于无线通信和PLC的网箱自动投饵系统,该系统根据网箱大小、鱼的种类及不同生长阶段监测到的反馈信息,通过粒位计与水下摄像头对投饵量、投饵速度、投饵距离实现了远程控制,投饵量控制精度高,饵料投放均匀,可较好地适应环境,提高饵料利用率。
自动投饵系统的发展趋势总结为: (1)机械化,采用机械投饵装置代替人工投饵,提高工作效率以及饵料利用率,并实现均匀投饵; (2)自动化,运用PCL等控制系统实现多路管道的定时、定量、精准投饵;(3)远程化,采用远程管理软硬件系统,实现远程控制网箱现场投饵; (4)智能化,运用计算机、传感器和机器视觉等技术,对水下环境、鱼的生长情况以及残饵量进行监测,实现智能化投饵。
3 网衣清洗装备技术
深海养殖业的快速发展对海洋生态环境造成了不同程度的破坏,藻类、贝类等附着物在网衣表面快速繁殖进而导致网孔堵塞,影响了网箱内外水体交换,减少了溶氧量和食物供应,影响了鱼类的生长率和成活率。藻类、贝类等附着物的增多,可影响网箱浮力,导致网箱倾斜以及抗风浪能力减弱,甚至对网衣造成破坏[41]。目前,国内外在网衣清洗技术方面的研究,取得了一定的成果。
水下洗网装备按工作原理可分为高压水流清洗装置与旋转式刷洗装置,此外,还有高压水流与毛刷相结合的洗网装置,高压水流与物理摩擦能除去不同种类的附着物。国外洗网装备大部分为高压水流清洗装置,对网衣能有效地清洗,但对网箱清洗的效果不佳。另外,国外也有对旋转式刷洗装置的研究报道,彭安华等[42]、Hodson等[43]对旋转式刷洗装置参数 (刷毛长度,刷盘半径)进行优化设计,设计了一种网衣清洗装置。由于网衣在水中是柔性结构,可随水流漂浮,故保持刷毛与网衣的良好接触,可以提高清洗效果。
水下洗网装备按自动化程度可分为半自动的洗网装备与采用水下有缆机器人ROV的全自动洗网装备。英国Aurora Marine公司提供ROV水下洗网机器人 (图4)网衣清洗服务,该洗网机器人采用履带式结构与水流双重驱动,能较好依附在网衣上,采用高压水流对网衣进行清洗;美国Yanmar Marine公司的履带式水下洗网机器人 (图5),采用高压水与毛刷结合的清洗方式[44-45]。
加拿大Marine Harvest公司、挪威AKVA group公司 (图6)和MPI公司 (图7)的洗网产品则是半自动的有缆洗网装置,其洗网作业是自动的,但洗网装置的运动则靠人工移动[29,46]。这几家公司的洗网装置原理类似,均采用高压水流作为动力,使洗网碟片压紧网衣,再利用旋转式高压水流达到洗网的目的。
目前,国内网衣清洗仍是以人工清洗为主,分为换网清洗与人工潜水清洗。人工潜水清洗成本高、时间长、安全系数低;换网清洗不但增加了成本,还容易对水下的鱼体产生一定程度的擦伤。国内对高压水流式清洗装置的研究,仍停留在高压水流的流场分析、喷头设计上,并未与水下机器人结合。中国水产科学研究院南海水产研究所对高速水流驱动叶轮旋转原理进行研究,设计了一种水下洗网装置[47];在此基础上,该所对高压射流水下洗网机旋转射流打击力进行计算,为洗网参数的选择提供了理论依据[48]。目前,国内对水下高压喷头的设计与流场的仿真方面的研究较多[49-50],对旋转式刷洗装置方面也有研究,主要集中在对装置的机构原理、电控系统设计方面。宋玉刚等[51]设计的网衣清洗系统,主要研究的是水下清洗原理,以及电控系统和起重机的控制油路设计过程,并对动力参数进行了理论分析和计算。
水下网衣清洗装置的快速发展,尤其是近些年对水下机器人ROV洗网技术的研究,有助于使用更大的网箱以及网衣深度,增大网箱容量。水下网衣清洗装置操作方便,安全可靠,可以对深水网衣进行清洗。

图4 Aurora Marine洗网机器人[44]Fig.4 Net cleaner from Aurora Marine[44]

图5 Yanmar Marine洗网机器人[45]Fig.5 Net cleaner from Yanmar Marine[45]

图6 AKVA group洗网装备[29]Fig.6 Net cleaner from AKVA group[29]

图7 MPI洗网装备[46]Fig.7 Net cleaner from MPI[46]
水下网衣清洗装备的发展趋势总结为: (1)洗网原理,旋转刷洗式与高压水流冲洗式结合达到网衣更佳的清洗效果; (2)水下机器人ROV洗网,安全系数高、操作方便,有利于深海养殖业的规模化发展;(3)以网衣清洗为主,网箱其他结构清洗为辅,有利于延长网箱和网衣的使用寿命;(4)水下监控系统、传感器、计算机等技术的发展为水下洗网机器人的智能化清洗提供了可能。
4 鱼类起捕装备技术
鱼类的起捕与输送是深海网箱养殖中的重要环节,自动化程度高的起捕装置可大大降低劳动强度,提高经济效益。同时机械化、自动化的起捕装置可大大提高鱼类的成活率,降低作业时对鱼类的人为损伤。目前,国内已研制出不同类型的吸鱼泵,主要有离心式吸鱼泵、真空式吸鱼泵、射流式吸鱼泵等。
4.1 离心式吸鱼泵
离心式吸鱼泵是使用最早的吸鱼泵,其原理为通过泵内叶轮高速旋转的离心力,在进口处产生负压将鱼水吸入,在出口形成高压排出鱼水,结构简单,工作效率高,但叶轮的高速旋转会损坏鱼体。
美国爱达荷州达斯马尼亚公司生产的特大型1614-P固定式离心鱼泵,可抽吸的鱼体长最大为72 cm,体质量为9 kg,每小时能抽吸鱼200 t。20世纪70年代,中国水科院渔机所研制的潜水式离心鱼泵,采用油压技术驱动鱼泵叶轮吸送鱼货,该泵100 min可抽吸冰鲜大黄鱼35 t,鱼体损伤率仅为1%[52]。
已有学者针对离心式吸鱼泵存在的功率小、对鱼体损伤等问题进行改进,运用ANSYS CFX等软件对泵的结构尺寸、性能进行优化设计。刘平[53]运用ANSYS CFX对离心吸鱼泵U-400的内部流场进行数值模拟和仿真分析,得出U-400在设计工况下的内部流场分布以及吸鱼泵性能参数。刘平等[54]在XYB-200离心式吸鱼泵的基础上,运用泵相似定律进行叶轮的进口、出口和直径的设计改进,利用ANSYS CFX模拟验证吸鱼泵性能参数,研制出了新型离心式吸鱼泵,对30~40 cm长的鲫鱼试验测试,结果显示,扬程5 m时吸鱼泵出口流量约为350 t/h,且对鱼体只产生少量轻微擦伤。
4.2 真空式吸鱼泵
真空吸鱼泵由真空泵、贮鱼槽、进出软管等组成,水环式真空泵是其形成负压的主要设备。其工作原理是利用真空负压原理,鱼水混合物受到负压力的作用被吸上来,该设备自动化程度高,对鱼体无损伤。
20世纪60年代,加拿大研制的虹吸管式气力吸鱼泵,由于虹吸的作用其能连续不断地将鱼从网箱中吸出,对鱼体的损伤小。目前在美国、加拿大、苏联、荷兰、朝鲜等国被广泛使用[55]。美国ETI公司生产的TRANSVAC型真空吸鱼泵的抽吸量为300~360 t/h, 功率为23~190 kW[52]。
国内最初研制的单筒间歇式真空吸鱼泵,由于只有单个罐体,不能连续吸鱼,功耗大且效率低[56-57]。曹广斌等[56]采用加入一个筒实现了双筒真空吸鱼泵的设计,同年浙江海洋学院郭建平等[58]研制了连续式真空吸鱼泵,吸鱼效率较高。苏玉香等[59]研制了新型双机双筒高效吸鱼泵,全程采用自动化控制,实现了连续工作吸鱼,有效地解决了传统真空吸鱼泵效率低、功耗大的问题。
4.3 射流式吸鱼泵
射流式吸鱼泵是通过高压水从出口喷嘴高速喷出,在真空泵内形成负低压,鱼水在外界大气压与泵内负压的压差作用下被吸入混合室,等到压力差平衡后,鱼水经导管排出。美国ETI公司研制拥有专利权的射流式吸鱼泵在挪威、加拿大等国广泛应用,每小时可吸送鲑鱼5 t、鳕鱼80 t、鲱鱼160 t,最大的抽吸量可达300~360 t/h,但由于造价高,体积笨重,主要用于处理死鱼[55]。
黄小华等[60]提出了射流式吸鱼泵结构优化设计方案。Wagner等[61]研究了鱼在吸鱼泵收鱼过程中的应激反应。Long等[62]研究了射流式吸鱼泵对鱼的损伤问题和运动姿态问题,得出在不同参数下对应的鱼类损伤概率与类型。黄道沛等[63]研究的基于负压原理射流式吸鱼泵,在原射流式吸鱼泵能连续吸鱼的基础上,利用真空吸鱼泵的负压对鱼的输送无损伤的优点,达到了能连续输送鱼且对鱼体无损伤的效果。
4.4 鱼类起捕技术
(1)国外养殖规模大,普遍采用吸鱼泵实现自动收鱼。国内主要采用人工或者自动化程度低的装置收鱼,因此,需研发机械化、自动化程度高的收鱼装置以提高工作效率,促进国内网箱养殖业的快速发展。(2)吸鱼泵功率大,结构尺寸大,需要配套的大型工作船进行安装。国内养殖规模小且大型工作船造价昂贵,大部分养殖企业没有大型工作船。(3)深海网箱养殖处于距陆地较远、风浪较大的深水海域,采用电缆供电成本太高,大多数养殖企业使用汽油机、柴油机,供电量低且无法满足吸鱼泵的使用。目前,研究利用风能、太阳能、海流能和波浪能供电还处于起步阶段,不能满足深远海养殖业发展需要。
5 深远海养殖业的发展趋势
5.1 养殖系统大型化
大型化、规模化的深远海网箱养殖是养殖业今后发展的必经之路。HDPE、金属、防污涂料等新材料和新技术的运用,以及对网箱结构的水动力特性进行分析,提高网箱的结构强度,增强其抗腐蚀、抗老化、抗风浪能力,将有利于养殖系统的大型化发展。
5.2 养殖区域向深海发展
浅海区域网箱密集、环境污染、水产品品质差等问题迫使养殖业向深海发展。中国拥有漫长的海岸线和广阔的海洋,深海养殖业将是中国海洋产业的支柱产业。海上太阳能、风能、海流能、波浪能的开发利用,将促进深海养殖业的发展。
5.3 养殖环境生态化
全面构建以深远海养殖平台为核心的 “深蓝渔业”生产模式。发展深海养殖有效缓解了浅海区环境、水产资源的压力,促进了浅海区生态环境的可持续发展,同时,利用深海资源优势大力发展养殖业以满足人民对优质水产品的需求。水下监测、自动投饵装置、自动洗网装置、环保型防污涂料等装备技术的开发运用,有效地减轻了养殖业对环境所造成的污染。
5.4 养殖装备设施的自动化、智能化
深海养殖业的快速发展依赖于大型网箱、自动投饵装置、自动洗网装置、自动收鱼装置、水下监测系统、海上供能系统、养殖管理系统、防污涂料等配套装备技术的大力支持,依赖于网箱集中控制、远程操控、自动化和智能化集成软件的支撑。
5.5 深水工船养殖系统的发展
深水工船养殖系统,可以有效地避免海浪、风浪等自然灾害对养殖系统的影响;可以较好地运用水循环系统,提供优质的水源,保证一个较佳养殖环境;提供水下光照可以刺激鱼类生长,且先进的摄像机与环境传感器可对水下环境、鱼类行为和投饵情况等进行实时监测;自动化、智能化装备技术可以得到更好地运用,提高深海养殖效率,保证海水产品的数量和质量。
[1] 章诚,李素霞.渔业转型的社会学阐释:一个分析框架[J].中国海洋大学学报:社会科学版,2015(1):23-29.
[2] 云行.“十三五”规划之海洋篇[J].卫星应用,2016(6):24-25.
[3] 郭根喜,关长涛,江涛,等.走进挪威和爱尔兰深海网箱养殖[J].海洋与渔业·水产前沿,2011(2):32-38.
[4] 徐君卓.挪威网箱养鱼持续高速发展的经验与启迪[J].海洋渔业,2000(4):180-184.
[5] 吕华庆.欧洲深水网箱养殖对我们的启示[J].现代渔业信息,2003,18(10):6-8,26.
[6] 郭根喜.我国深水网箱养殖产业化发展存在的问题与基本对策[J].南方水产,2006,2(1):66-70.
[7] 黄一心,徐皓,丁建乐.我国离岸水产养殖设施装备发展研究[J].渔业现代化,2016,43(2):76-81.
[8] 陶宇,李亚冰.海洋防污涂料技术的研究现状及展望[J].化学与黏合,2012,34(5):67-71.
[9] Qian P Y,Lau S C,Dahms H U,et al.Marine biofilms as mediators of colonization by marine macroorganisms:implications for antifouling and aquaculture[J].Marine Biotechnology,2007,9(4):399-410.
[10] Chen M L,Qu Y Y,Yang L,et al.Structures and antifouling properties of low surface energy non-toxic antifouling coatings modified by nano-SiO2powder[J].Sciences China Series B:Chemistry,2008,51(9):848-852.
[11] Banerjee I,Pangule R,Kane P S.Antifouling coatings:recent developments in the design of surfaces that prevent fouling by proteins,bacteria,and marine organisms[J].Advanced Materials,2011,23(6):690-718.
[12] 徐皓,张建华,丁建乐,等.国内外渔业装备与工程技术研究进展综述[J].渔业现代化,2010,37(2):1-8.
[13] 陈昌平,王文,郑佳成,等.水流作用下平面金属网衣水阻力特性数值模拟[J].大连海洋大学学报,2017,32(3):363-368.
[14] 董国海,孟范兵,赵云鹏,等.波流逆向和同向作用下重力式网箱水动力特性研究[J].渔业现代化,2014,41(2):49-56.
[15] 鲁伟.网箱养殖鱼类分级与起捕技术的试验研究[D].青岛:中国海洋大学,2004.
[16] 黄汉泉,周瑞莲,陈健光.广东省深水抗风浪网箱的发展情况和前景[J].水产科技,2004(1):l-3.
[17] 陈傅晓,李向民,谭围,等.深水网箱养殖促进海南渔业创新发展[N].光明日报,2012-04-27(009).
[18] 徐皓,江涛.我国离岸养殖工程发展策略[J].渔业现代化,2012,39(4):1-7.
[19] 陈傅晓,谭围.海南深水网箱养殖业发展存在的问题与基本对策[J].安徽农业科学,2015,43(29):59-61.
[20] 操戈,邓卫哲,徐承旭.海南大力发展深海网箱养殖[J].水产科技情报,2017,44(2):109.
[21] 胡昱,郭根喜,黄小华,等.基于PLC的深水网箱自动投饵系统[J].南方水产科学,2011,7(4):61-68.
[22] 徐皓,张建华,丁建乐,等.国内外渔业装备与工程技术研究进展综述(续)[J].渔业现代化,2010,37(3):1-5,19.
[23] 袁凯.投饲机器人关键技术研究[D].上海:上海海洋大学,2013.
[24] 葛一健.我国投饲机产品的发展与现状分析[J].渔业现代化,2010,37(4):63-65.
[25] 刘彬.国内外渔业装备与工程技术的研究进展[J].乡村科技,2016(11):51.
[26] 宋协法,路士森.深水网箱投饵机设计与试验研究[J].中国海洋大学学报:自然科学版,2006,36(3):405-409.
[27] 庄保陆,郭根喜.水产养殖自动投饵装备研究进展与应用[J].南方水产,2008,4(4):67-72.
[28] 汪昌固.网箱智能投喂系统开发及关键技术研究[D].太原:太原科技大学,2014.
[29] Akva Group.Your aquaculture technology and service partner[DB/OL].[2017-04-15].http://www.akvagroup.com/products/cage-farming-aquaculture/feed-systems
[30] Skøien K R,Aas T S,Alver M O,et al.Intrinsic settling rate and spatial diffusion properties of extruded fish feed pellets[J].Aquacultural Engineering,2016,74:30-37.
[31] Papandroulakis N,Dimitris P,Pascal D.An automated feeding system for intensive hatcheries[J].Aquacultural Engineering,2002,26(1):13-26.
[32] Aasa T S,Oehmea M,Sørensenb M,et al.Analysis of pellet degradation of extruded high energy fish feeds with different physicalqualities in a pneumatic feeding system[J].Aquacultural Engineering,2011,44(1):25-34.
[33] Oehme M,Aas T S,Sørensen M,et al.Feed pellet distribution in a sea cage using pneumatic feeding system with rotor spreader[J].Aquacultural Engineering,2012,51:44-52.
[34] 何宝快.对虾养殖投饵装置的研制[J].水产科学,1990,9(2):21-24.
[35] 武立波,刘远胜,刘学喆,等.海洋牧场远程监控投饵系统设计[J].渔业现代化,2010,37(2):23-25,13.
[36] 郭根喜,庄保陆,王良运,等.基于PLC的远程气力输送自动投饵控制系统的设计与实现[J].南方水产,2008,4(6):7-16.
[37] 王志勇,谌志新,江涛.集中式自动投饵系统的研制[J].渔业现代化,2011,38(1):46-49.
[38] 王威克.我国成功研发深水网箱远程多路自动投饵系统[N].中国渔业报,2009-10-26(004).
[39] 胡昱,郭根喜,黄小华,等.深水网箱养殖自动投饵计量装置设计[J].南方水产科学,2014,10(2):80-85.
[40] 张惠娣,汪昌固,王贤成.基于无线通信和PLC的网箱自动投饵系统设计[J].控制工程,2014,21(4):520-523.
[41] 张汉华,梁超愉,吴进锋,等.大鹏湾海水网箱养殖区的污损生物研究[J].中国水产科学,2003,10(5):414-418.
[42] 彭安华,刘成文,陆波.一种带有清洗装置和数据采集系统的深水网箱[J].南方农业,2016(3):169-171.
[43] Hodson S L,Lewis T E,Burke C M.Biofouling of fish-cage netting:efficacy and problems of in situ cleaning[J].Aquaculture,1997,152(1-4):77-90.
[44] Aurora Marine.ROV aquaculture net cleaning[DB/OL].[2017-04-15].http://www.auroramarine.co.uk/
[45] Yanmar Marine.Net Cleaning Robot.Submergible cleaner for fish farming nets[DB/OL].[2017-04-15].http://www.yanmarmarine.com/Products/Net-Cleaning-Robot/
[46] MPI.Multi pump innovation[DB/OL].[2017-04-15].http://www.mpi-norway.com/
[47] 黄小华,郭根喜,胡昱,等.轻型移动式水下洗网装置设计[J].渔业现代化,2009,36(3):49-52.
[48] 张小明,郭根喜,陶启友,等.高压水射流水下洗网机旋转射流打击力计算[J].渔业现代化,2010,37(1):25-28,33.
[49] 胡昱,郭根喜,黄小华,等.基于Ansys的水下洗网机流场模拟仿真[J].南方水产,2010,6(1):7-11.
[50] 胡昱,郭根喜,黄小华,等.高压射流式水下洗网机喷嘴的设计[J].南方水产,2008,4(4):16-20.
[51] 宋玉刚,郑雄胜.深海网箱网衣清洗系统设计研究[J].机械研究与应用,2012(2):41-43,46.
[52] 叶燮明,徐君卓.国内外吸鱼泵研制现状[J].现代渔业信息,2005,20(9):7-8.
[53] 刘平.基于ANSYS CFX的吸鱼泵的内部流场分析[J].流体机械,2014,42(11):43-46.
[54] 刘平,徐志强,徐中伟.离心式吸鱼泵叶轮的设计[J].流体机械,2016,44(3):50-54.
[55] 叶燮明,徐君卓,陈海鸣,等.网箱吸鱼泵的研制和试验[J].渔业现代化,2003(3):25-26.
[56] 曹广斌,蒋树义,韩世成.真空双筒活鱼提升机的设计与试验[J].大连水产学院学报,2004,19(3):194-198.
[57] 黄滨,关长涛,林德芳,等.网箱真空活鱼起捕机的研究[J].海洋水产研究,2004,25(3):54-60.
[58] 郭建平,吴常文.大型深水网箱连续式真空吸鱼泵的设计研究[J].中国水产,2004(3):73-75.
[59] 苏玉香,刘国平,单海校,等.新型双机双筒高效吸鱼泵及其控制系统设计[J].船舶工程,2013,35(4):48-51,112.
[60] 黄小华,郭根喜,陶启友.射流式吸鱼泵关键技术研究及设计[J].南方水产,2007,3(3):41-46.
[61] Wagner E J,Driscoll D M.Physiological stress responses of cutthroat trout to loading by fish pump,conveyor,or dip net[J].Journal of Applied Aquaculture,1994,4(1):19-27.
[62] Long X P,Xu M S,Lyu Q,et al.Impact of the internal flow in a jet fish pump on the fish[J].Ocean Engineering,2016,126:313-320.
[63] 黄道沛,李存军.基于负压原理的射流式吸鱼泵研究[J].浙江海洋学院学报:自然科学版,2016,35(4):354-357.
猜你喜欢
船舶与海洋工程(2023年3期)2023-07-14 06:02:36
渔业研究(2023年3期)2023-06-20 04:51:52
今日农业(2021年1期)2021-03-19 08:35:38
渔业致富指南(2020年16期)2020-12-18 21:54:47
渔业致富指南(2020年5期)2020-12-18 21:14:57
新农村(浙江)(2018年5期)2018-05-31 09:48:17
辽金历史与考古(2017年0期)2017-02-06 03:33:32
电子制作(2017年24期)2017-02-02 07:14:45
渔业致富指南(2016年12期)2016-11-11 07:07:31
湖南农业(2016年3期)2016-06-05 09:37:36
