
大型水电工程百米级引水竖井的病害检测技术
2018-03-06 07:34:00唐炉亮字陈波李清泉刘海波
测绘学报 2018年2期
唐炉亮,字陈波,李清泉,3,初 旭,刘海波,陈 西,孙 飞
1. 武汉大学测绘遥感信息工程国家重点实验室,湖北 武汉 430079; 2. 华能澜沧江水电股份有限公司,云南 昆明 650214; 3. 深圳大学空间信息智能感知与服务深圳市重点实验室,广东 深圳 518060
水电作为一种可再生资源和清洁能源,在发达国家发电总量中占有很大比重,如挪威水电发电量占全国总发电量的95%以上,巴西水电比重超过70%,加拿大水电比重接近60%,截至2016年底,我国水电比重大约12.2%。在水力发电站运行过程中,水库中的水经过一条高差较大的引水道竖井或者斜井来获得较大流速,推动引水道底端的发电机组工作。引水道在水流不断冲刷的过程中,存在混凝土冲蚀的风险,轻则造成非正常停机检修,重则造成机组水轮机及流道损毁,影响整个水电站引水发电系统运行,进而危及水电站大坝下游数百万群众和下游城市的存亡,造成不可估量的后果[1-3]。对引水道进行病害缺陷检测,研判病害缺陷的发展趋势,成为大型水电站安全稳定运行的“重中之重”。对于垂直落差大的引水道竖井段,人员无法直接到达,脚手架搭设检查,资金投入大、作业风险高,工期长不可行,目前尚未有水电站对其开展过系统性的检查工作,无法全面掌握竖井混凝土表面病害情况,在国际上属于检测“盲区”。因此,百米级引水竖井的病害缺陷检测成为大型水电站引水道检测的“难中之难”。
目前国内外对于百米级引水道竖井检测研究尚属空白,没有能满足引水道竖井检测应用的成熟解决方案,没有满足大型水电站引水道竖井检测需求的竖井检测技术与装备,没有行之有效的成功案例。对于高度较低的引水道部位,在电站检修期间可以通过搭脚手架人工排查、图像[4-5]、超声波[6-7],以及热红外[8-9]、三维激光扫描[10-11]等方式检测,而对于高差较大的竖井段则无能为力,有的水电站自建成以来,竖井段从未进行过任何检测,给水电站的稳定运行带来了极大的安全隐患。美国奥本山公司[12-13]通过遥控潜航器实现了水下隧道的视频和声呐数据采集工作,然而这种方式需要将引水道内部注满水,这需要耗费较多时间,另外将引水道注满水存在较大的安全隐患和风险,不适合高速大体量冲水的竖井检测。随着无人机技术的发展[14-20],无人机也被尝试应用于大坝检测中,文献[21]采用搭载了IMU、激光扫描仪和LED等设备的无人机对佐治亚州的两个大坝引水道的水平段和下弯段进行了手动操作的飞行试验,然而在引水道竖井段则无能为力。由于室内环境下GPS无信号,无人机无法定位,无法避免与引水道混凝土壁碰撞情况,因此无人机仅能在地面操作人员视线范围进行数据采集,对于无法通视且黑暗的竖井段不具备检测能力。
针对大型水电工程百米级引水竖井数据获取与病害检测的国际性难题,本文提出了一种3S技术与多传感器集成的竖井检测方案,自主研制了百米级竖井数据获取与病害检测装备,在云南糯扎渡水电厂进行了200 m级竖井现场的引水道多源数据采集与病害检测试验。结果表明,该检测装置能够满足大型水电站百米级竖井引水道的检修工作。
1 基于飞艇浮空平台和多传感器集成的竖井检测方案
以无人系留飞艇为浮空装载平台,集成多种测绘传感器的百米级垂直竖井检测方案,包括主要搭载检测装置的无人飞艇、检测装置硬件组成以及检测装置运行软件3个部分。
1.1 无人飞艇设计
无人机和无人飞艇是目前主流的两种低空无人飞行平台[22]。无人机体积小、飞行灵活,但是载重能力弱、续航时间短,并且竖井环境黑暗、狭长、封闭,无人机无法获取GPS信号进行定位,一旦无人机在脱离视线范围进行数据采集,很容易撞击到竖井壁,引发坠落事故。无人飞艇的优点是技术成熟[23-25]、使用安全、载重能力较好,采用惰性氦气浮力作为上升动力,续航能力较好,通过设计防撞安全气囊,一方面可以避免无人飞艇主体直接与竖井壁发生碰撞,一方面也可以为无人飞艇提供多气室,避免飞艇碰撞竖井对检测装置产生影响,因此本文选用无人飞艇作为检测装置的搭载飞行平台。
针对引水道竖井特殊的飞行环境条件,本研究设计了一款装配快、防碰撞、浮空能力稳定、竖井环境适应性强的圆柱形无人系留飞艇浮空装载平台,其设计图如图1所示。
该飞艇有以下几个特点:
(1) 飞艇下部分设计为锥形,这是为了保证飞艇边沿不会遮挡飞艇底部的激光、CCD相机的数据采集,此外,这种设计也有利于飞艇底部的竖井检测装置的稳定。
(2) 飞艇上部分设计为圆柱形,圆柱状的无人飞艇在垂直竖井环境下,能在有限的高度和宽度条件下,尽可能地提高整个低空飞行平台的上升浮力,更强的载重能力意味着飞行平台可以携带重量更大并且更加精密的仪器进行竖井数据采集,硬件设备可选择的范围也将更多,也能携带更多的电源,提高续航能力。此外,圆柱形的飞艇更加契合竖井环境,在与竖井内壁发生碰撞的时候,受力较为均匀,无人飞艇倾斜的概率将更小,保证数据采集过程的稳定。
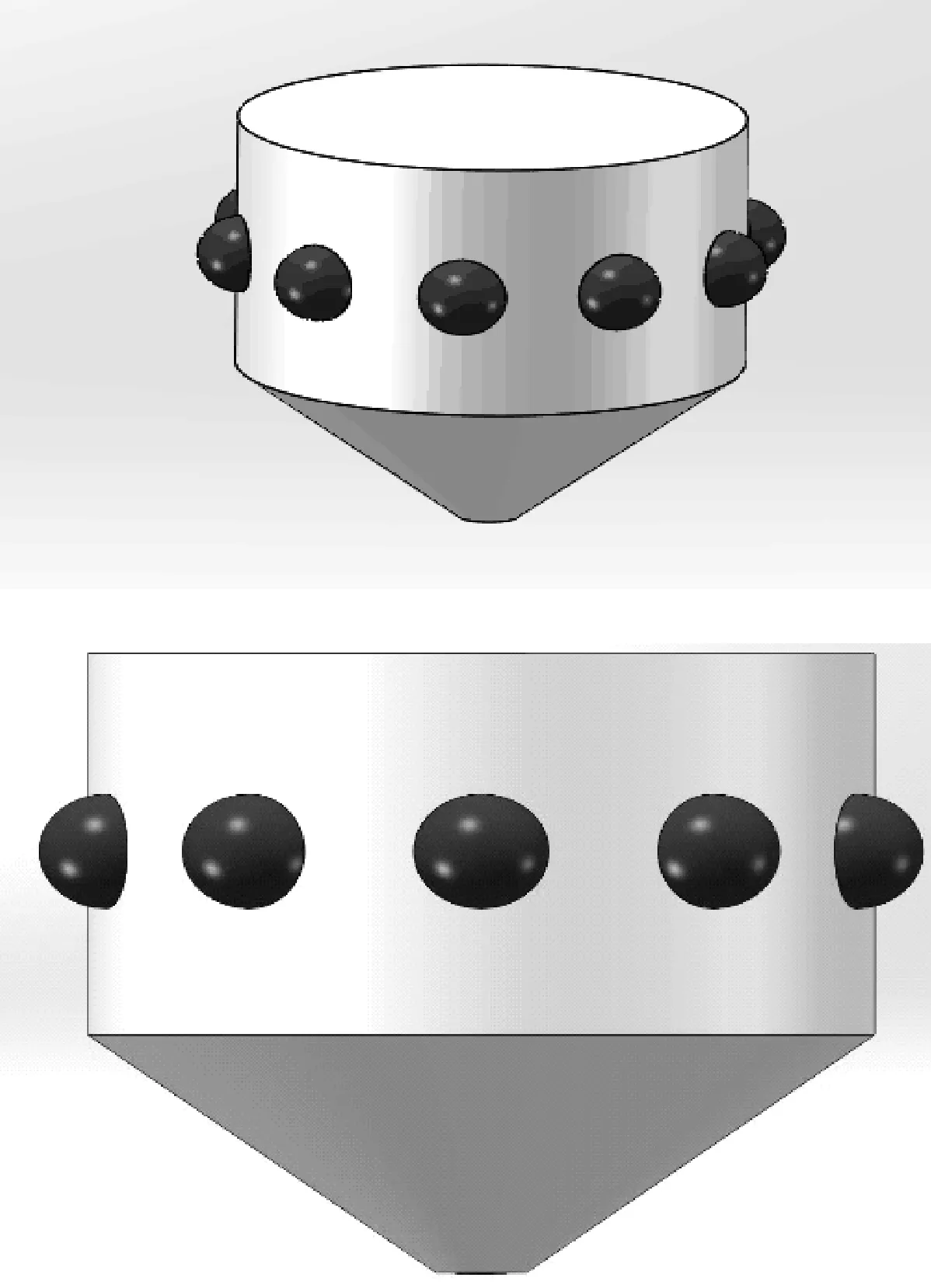
图1 无人飞艇设计示意图Fig.1 Design of unmanned airship
(3) 飞艇主体部分安装有8个半球形可灵活拆卸的安全气囊。这8个气囊是独立个体,内部不与飞艇主气囊相通。当飞艇在竖井内升降过程中,不可避免地会与竖井内壁产生摩擦与碰撞,这些气囊即使出现破损也不会影响主体飞艇,从而起到保护飞艇柱状主体部分作用,并且这8个安全气囊可以随时更换。
1.2 检测装置硬件组成
竖井检测装置可以分成数据采集模块、定姿定位模块、集成控制模块、电源管理模块、传输通信模块以及飞艇动力模块等6个模块。集成控制模块是指集成处理与控制各个硬件采集传感器的工控机与多传感器集成控制部分,电源管理模块是指整个竖井检测装置的电源系统,传输通信模块由各个硬件装置之间相互通信的线缆以及以太网交换机等构成,飞艇动力模块由地面控制平台的多档位电动卷扬机以及连接飞艇和卷扬机的轻质高强度线缆等构成。这其中,数据采集模块和定姿定位模块是整个竖井检测装置的核心。
数据采集模块的构成为4台高分辨率的CCD相机和一台三维激光扫描仪, 分别获取引水道竖井的影像和三维点云数据。三维激光扫描仪放置在检测装置的竖直中心轴上,在检测过程中360°旋转获取三维点云数据。4台相机依次间隔90°设置,并且每个CCD相机都相应配备一台高亮度的探照灯以保障竖井段黑暗环境下的成像质量。通过图像拼接,可以得到360°的竖井全景图像,这种方式大大缩短了影像数据的采集时间并且保证影像数据能够完整覆盖整个竖井段内壁。
在狭长、封闭、黑暗的竖井段内,检测装置的精确定位很困难,由于不能布设wifi、蓝牙等基站,现有室内定位技术难以适用于竖井定位。本研究检测装置的定姿定位模块主要采用惯性导航测量单元(IMU)、气压高度计、激光与计米器等设备构成,其中IMU测算出整个检测装置的3个方向上的姿态角,激光扫描仪获取装置在引水道竖井中的水平位置,气压高度计测算出当前装置的高度,计米器量测出装置在飞艇浮力作业下上升的高度,从而将惯导(IMU)、气压高度计、激光与计米器等测量的位置与姿态信息进行松/紧组合,解决检测装置的定姿定位问题。
1.3 多传感器数据获取与处理
检测装置的多传感器集成过程中,涉及CCD相机、激光雷达、IMU与气压高度计4类数据的接收与处理,检测装置软件的数据处理流程图如图2所示。检测装置初始化需要检查各个数据采集设备和工控机的通信是否正常,所采集的数据是否存在异常,当通过检验之后,将各自的采集数据进行保存。
由于数据采集传感器种类较多,各个采集传感器接口不一,CCD相机和三维激光雷达的通信采用RJ45以太网接口,气压高度计通信采用USB串口,IMU通信采用RS422串口,各个采集装置的通信协议也存在诸多差异。
CCD相机和三维激光雷达采用以太网和工控机进行通信,通信方式采用UDP通信,只进行数据监听。以三维激光雷达为例,通过2368端口获取由激光雷达传输的数据,一个有效的数据包总共1248 bytes,其中42 bytes为数据包头,4 bytes为时间戳,2 bytes为激光设备内部校验码。在16进制下,有效的数据文件以“ffff”开头,以“00 00”结尾,根据数据包的开头和结尾标记来来完成数据的传输,由此完成一个数据包的有效解析。
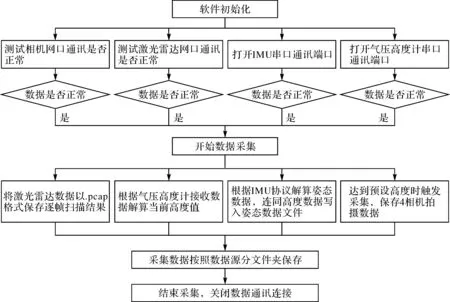
图2 检测装置数据处理流程Fig.2 Data processing flowchart of detection device
气压高度计与工控机之间通过串口实现通信,其数据包信息为气压高度计当前所处环境下的气压与温度。一个有效的数据包为8个字节,前5个字节为当前气压值,单位为帕,后3字节为当前温度值,单位为0.1℃。在气压高度计与工控机通讯过程中,按照字节接收先后顺序依次从起始位接收8个字节,然后按照气压在前温度在后的顺序依次解析一个数据包中的温度和气压值。
根据IMU厂商提供的通讯协议,IMU惯组补偿后数据通过RS422串口输出,波特率115 200 bps,按照表1的数据帧格式进行IMU数据的通信解析。
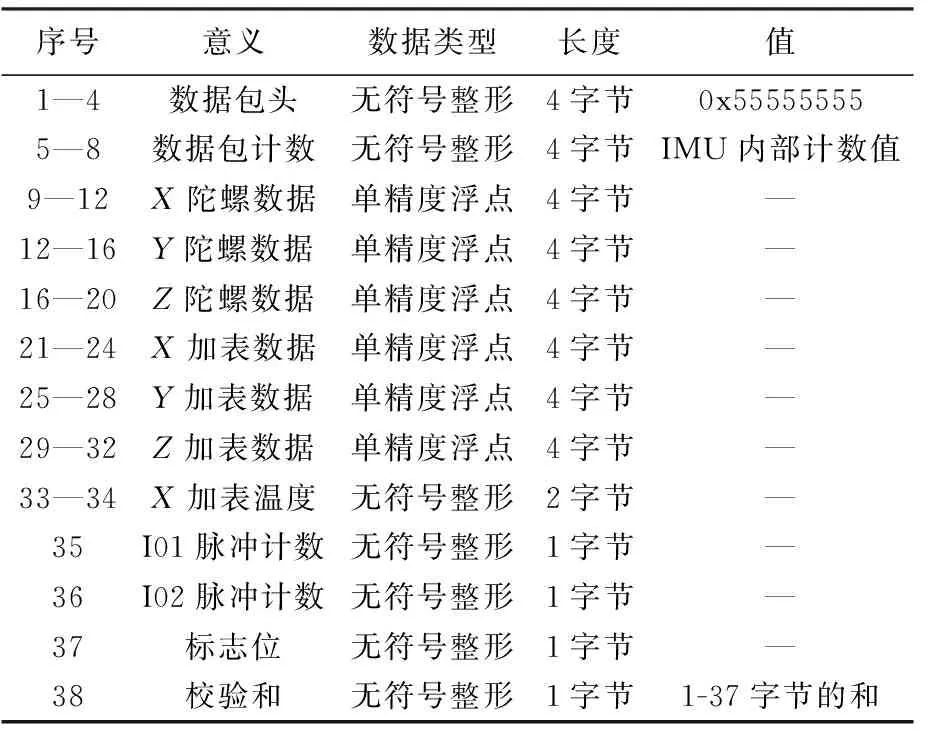
表1 IMU通讯数据格式
2 竖井检测装备的多传感器集成与同步控制
整个检测装备硬件系统由数据采集装置与无人飞艇飞行控制两大部分构成,硬件系统集成如图3所示。三维激光扫描仪和CCD相机为数据采集设备,通过对竖井混凝土表面拍照扫描采集竖井段数据。气压高度传感器和照明模块独立供电,其余硬件设备由供电设备统一供电。检测装备工控机作为控制部分是整个数据采集装置核心,负责接收、处理以及存储各个硬件设备的数据并统一授时,工控机实时解算出当前数据采集设备所在的位置,结合CCD相机的拍摄图幅,控制CCD相机进行拍摄以保证能够完整覆盖整个引水道竖井。
数据采集装置采用“米”字格设计,装置包括照明模块、数据采集模块、定位模块、控制系统以及通信模块。控制系统为整个数据采集装置核心,控制系统负责整个数据采集装置的采集进程;定位模块通过高精度大气压高度传感器、惯性导航装置测定数据采集装置位置及姿态信息;照明模块为CCD相机拍摄垂直竖井表面提供光照环境。每个模块进行独立封装设计,这样在系统改造和集成的时候能减少模块间的耦合程度,提高模块工作效率,降低系统集成的难度。
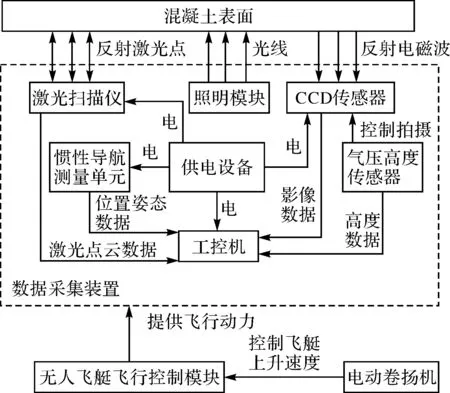
图3 硬件系统集成结构Fig.3 Integration diagram of hardware system
数据采集平台总共由4层组成(图4):顶层数据获取装置与飞艇的连接云台,通过4个减震弹簧,使整个采集平台在飞艇晃动和倾斜的状态下仍能保持铅锤向下状态,保持整个采集平台的相对稳定,提高数据采集的精度,减少数据采集误差;第2层安装三维激光雷达、IMU与气压高度计(图5);第3层是“米”字格设计安装的4个相机与4个照明装置,4个相机之间与4个照明装置之间交叉设置,夹角均为45°,在数据采集过程中,工控机实时计算出当前位置,触发相机拍摄影像,4个方向的4张影像可以拼成所拍摄高度360°范围的全景影像(图6);最底层安装电源管理系统、以太网交换机以及工控机等设备(图7)。整个采集装置由两个22.2 V电压的电源独立供电,其中一个电池通过开关与工控机和IMU直连,这两个设备在22.2 V电压下可直接正常工作,另外一个电池通过22.2 V转12 V的变压器与三维激光雷达、CCD相机以及12 V转9 V变压器连接,最后网络交换机通过12 V转9 V变压器输出端供电。
检测装置集成平台最大外径为55 cm,能满足从直径60 cm蜗壳进入的要求。考虑到引水道内潮湿的工作环境,所有供电和通信线路连接都通过双层绝缘,防止在潮湿环境下出现漏电、短路等安全事故。整个集成平台的支架采用铝合金材料制作,固件与固件之间通过螺丝固定,既方便拆卸,也保证了足够的强度和牢固性。数据采集装置的重量为46 kg,在飞艇设计所能承受的载重范围内。
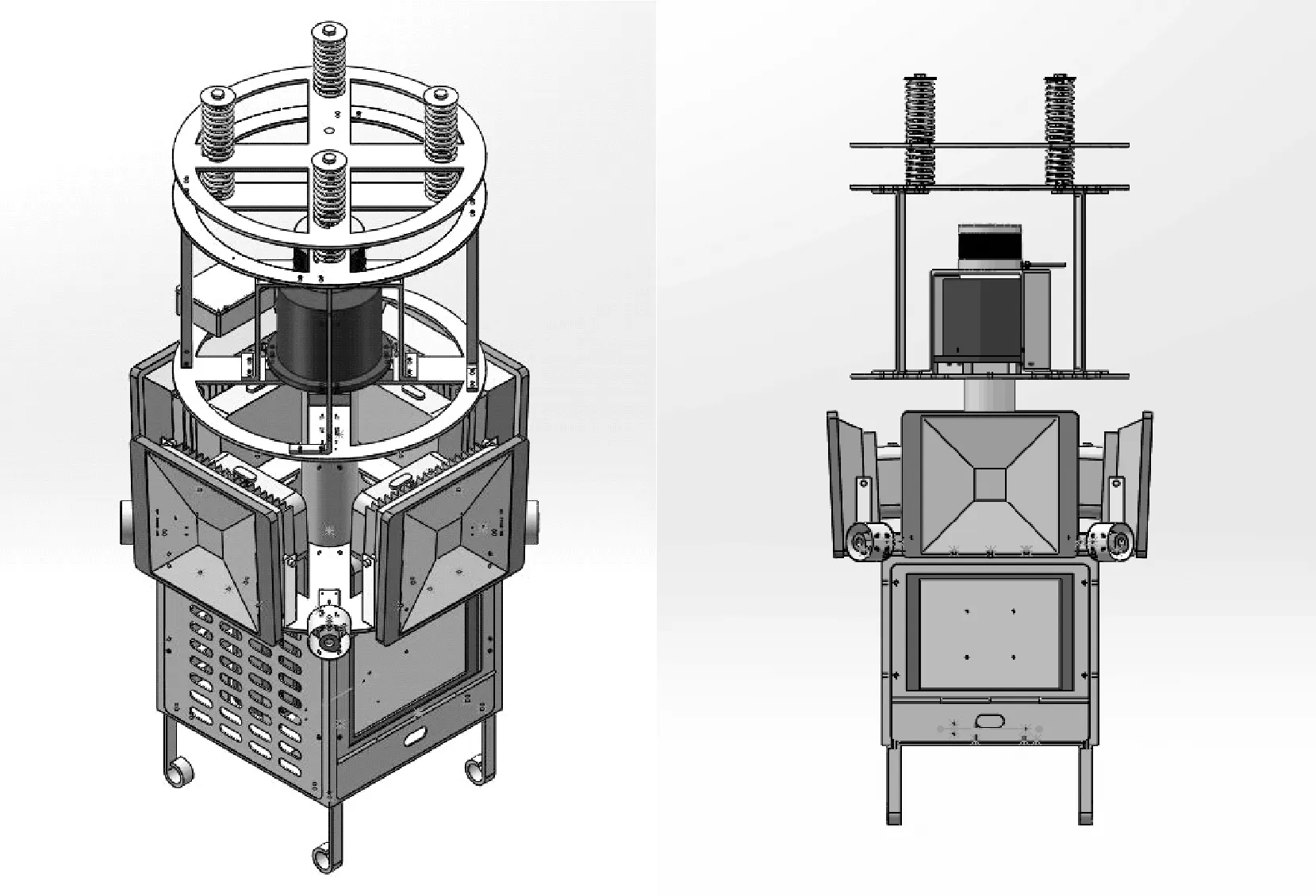
图4 检测装置整体集成设计图Fig.4 Overall design of detection device

图5 惯导(IMU)与激光扫描仪侧视图Fig.5 Lateral view of IMU and laser scanner

图6 全景CCD相机、照明设备侧视图Fig.6 Lateral view of CCD camera and lighting device
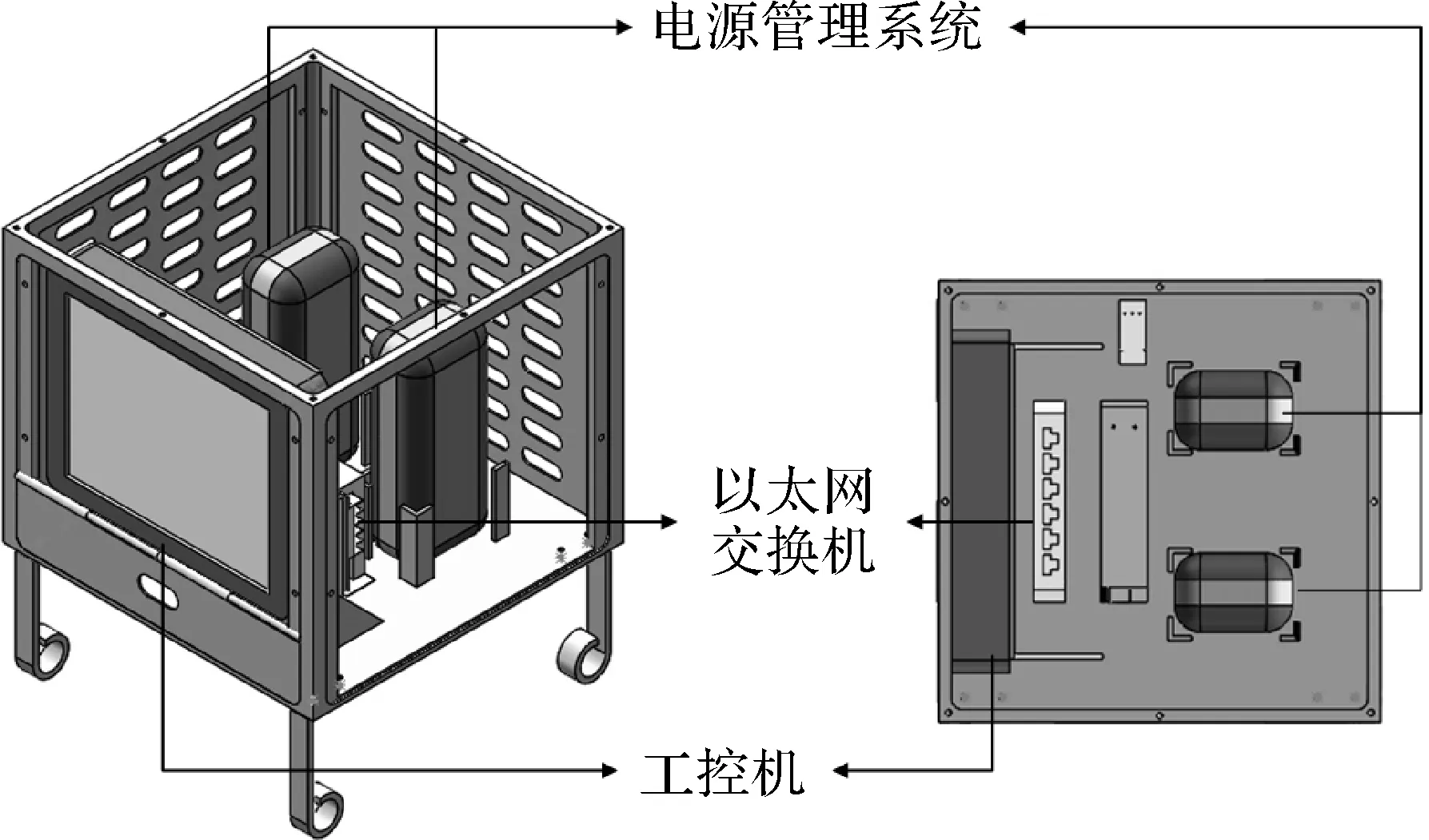
图7 工控机、电源系统侧视及俯视图Fig.7 Lateral and top view of industrial computer and power system
3 试验分析
试验以华能澜沧江水电股份有限公司糯扎渡水电厂的200 m级引水道垂直竖井为研究对象。糯扎渡水电站位于澜沧江下游区域,其水库库容高达237.03×108m3,电站装机容量5850 MW,多年平均发电量239.12×108kW·h。电站引水道共有9条,采用单机单管供水,各管道间平行布置,引水道可以分为上平段、上弯段、竖井段、下弯段、下平段5部分。上平段、上弯段、竖井段、下弯段开挖断面尺寸内径为11.2 m的圆形断面,衬砌后内径为9.2 m。上下平段高差151.3 m,采用竖井连接,竖井段深101.3 m,其引水道竖向剖面如图8所示。
糯扎渡水电站9条引水道的竖井段在投运后至今仍未进行过系统性检查,其竖井段内壁状况目前处于未知状态。
2017年5—7月在云南糯扎渡水电厂2、3、4号200 m级引水道竖井现场进行了多次竖井多源数据采集与病害检测试验(图9)。200 m级引水道竖井一次检测时长40 min左右,采集一次数据量在6 GB左右,其中点云数据量为1.5 GB,影像数据为4.5 GB。通过对采集的影像数据拼接, 可以得到各个高度的引水道竖井影像(图10)以及覆盖整个竖井的全景拼接影像。通过对采集的三维点云数据进行处理,可以得到整个竖井的三维点云图(图11)。
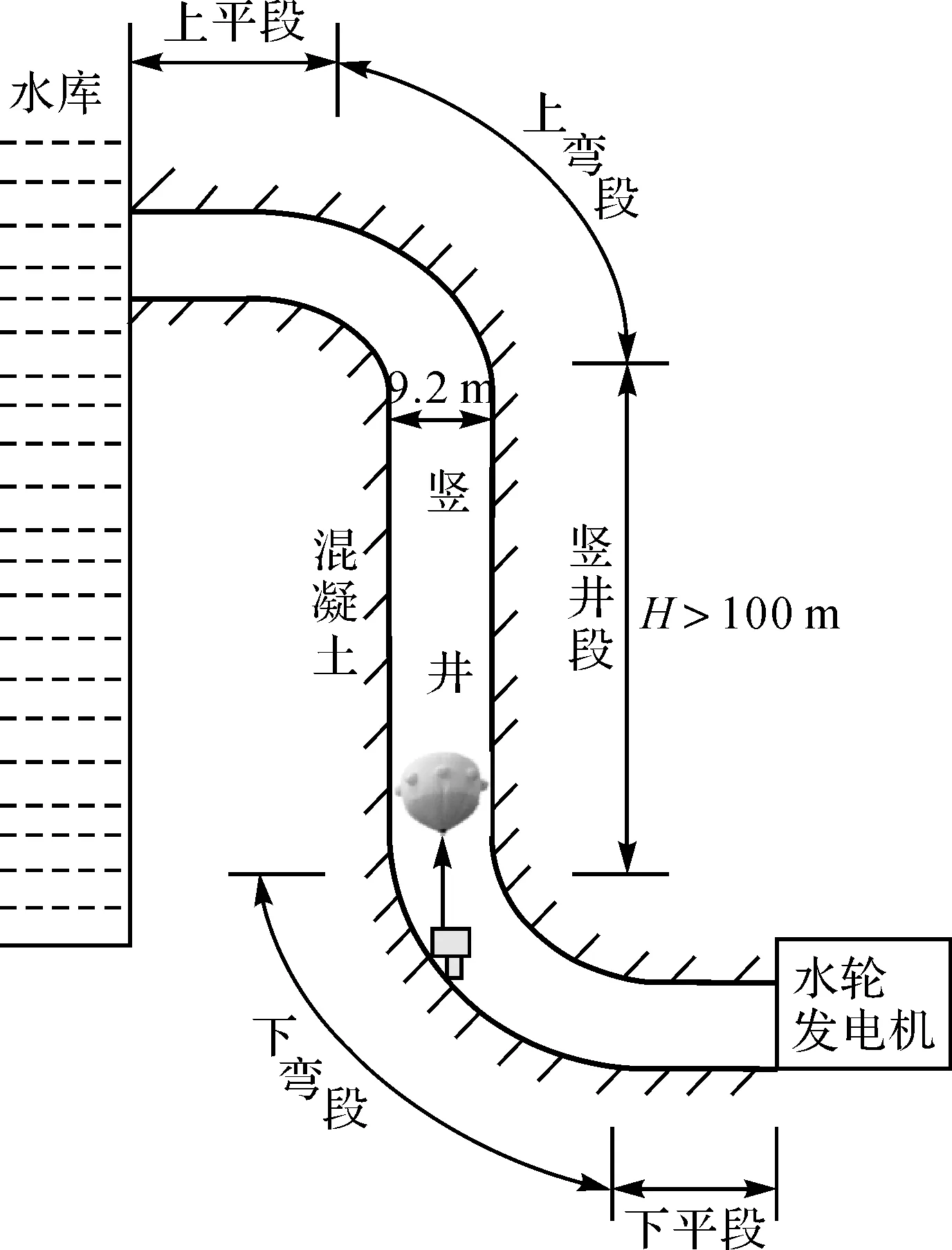
图8 水电站引水道竖井剖面Fig.8 Vertical profile of hydropower station’s diversion channel

图9 自主研发的竖井检测装备和现场测试情况Fig.9 The first shaft defect-detecting equipment and its field test
引水道竖井检测装置采集的图像比较清晰,三维点云实现了对竖井的整体精确建模。但是由于竖井环境潮湿,引水道入水口难以完全密闭,竖井检测过程中还将伴随着少量水沿着竖井壁往下流,导致竖井壁混凝土表面的小裂缝会被河水或泥沙填满,病害无法自动检测,目前只能通过模型和算法,找到病害疑似区域,再通过人工判读和专家评判,确定病害区域和大小。本研究在糯扎渡水电站2号竖井39.0~45.5 m高度通过模型和算法发现43.3~44.3 m处存在裂缝病害疑似区域(图12(a)),经人工判读发现该区域异常,有一条贯穿整个高度上的横向裂缝,目前基本上无法识别其宽度,并且该区域有黄色液体从井壁流出后,沿竖井壁往下扩散形成黄色“彗尾”,由于裂缝较小,流出的黄色液体扩散区域很小。水电专家评判认为,由于竖井水压很大,形成小的压力裂缝,由于竖井常年充满水,水进入裂缝停留长时间钙化后泛黄,当一年一度竖井检修关闭水闸后,黄色钙化水从裂缝中流出,沿竖井壁扩散形成黄色“彗尾”。因此,黄色的钙化水“彗尾”成为竖井病害评判的依据,通过对竖井影像深入分析,可以发现2号竖井43.3~44.3 m高度处的横向贯穿竖井的微小裂缝(图12(b)),也可以更加深入发现该高度上的局部裂缝情况如图12(c)所示。
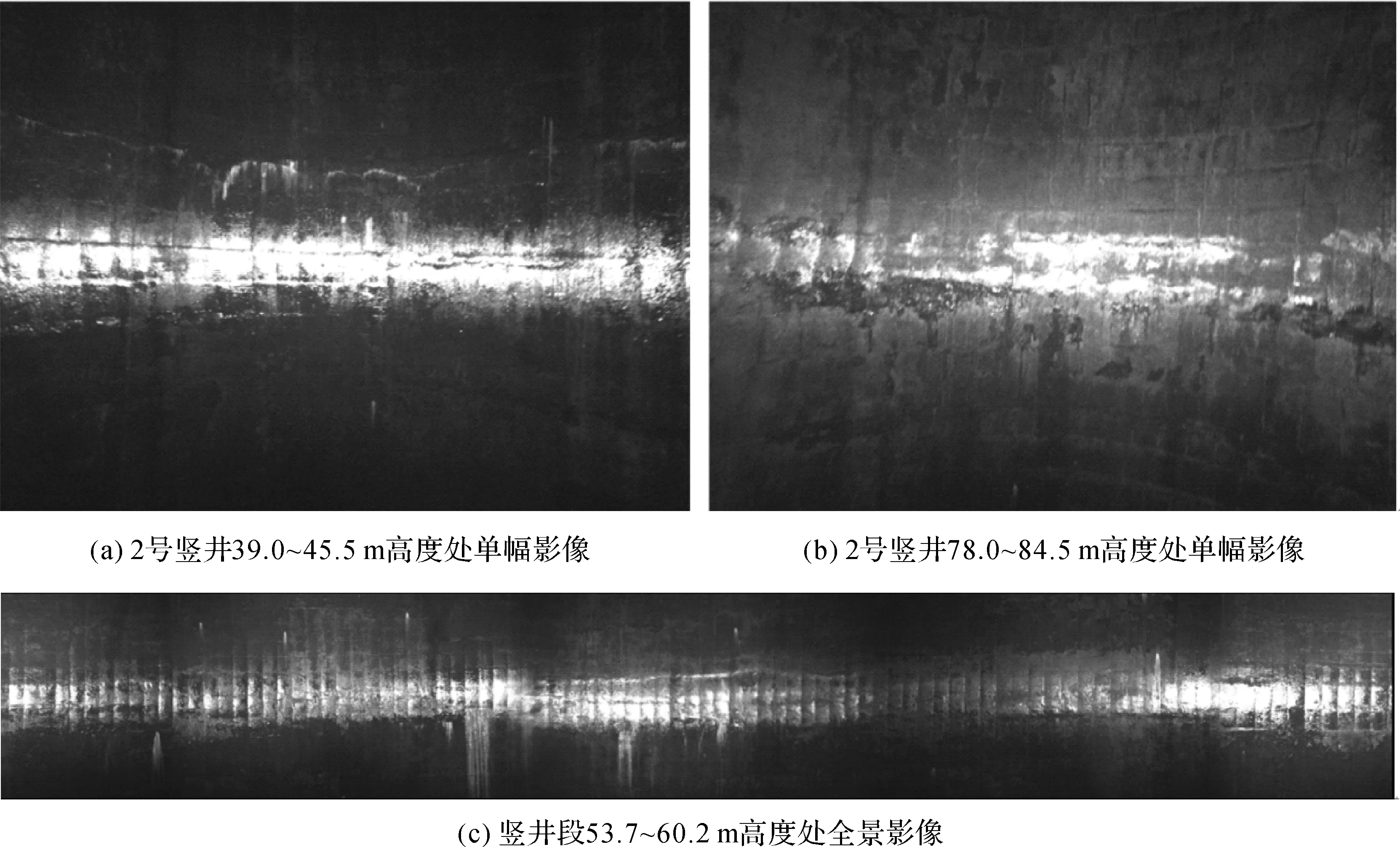
图10 2号竖井不同高度处的单幅影像与全景影像Fig.10 Single and panorama image of No.2 shaft
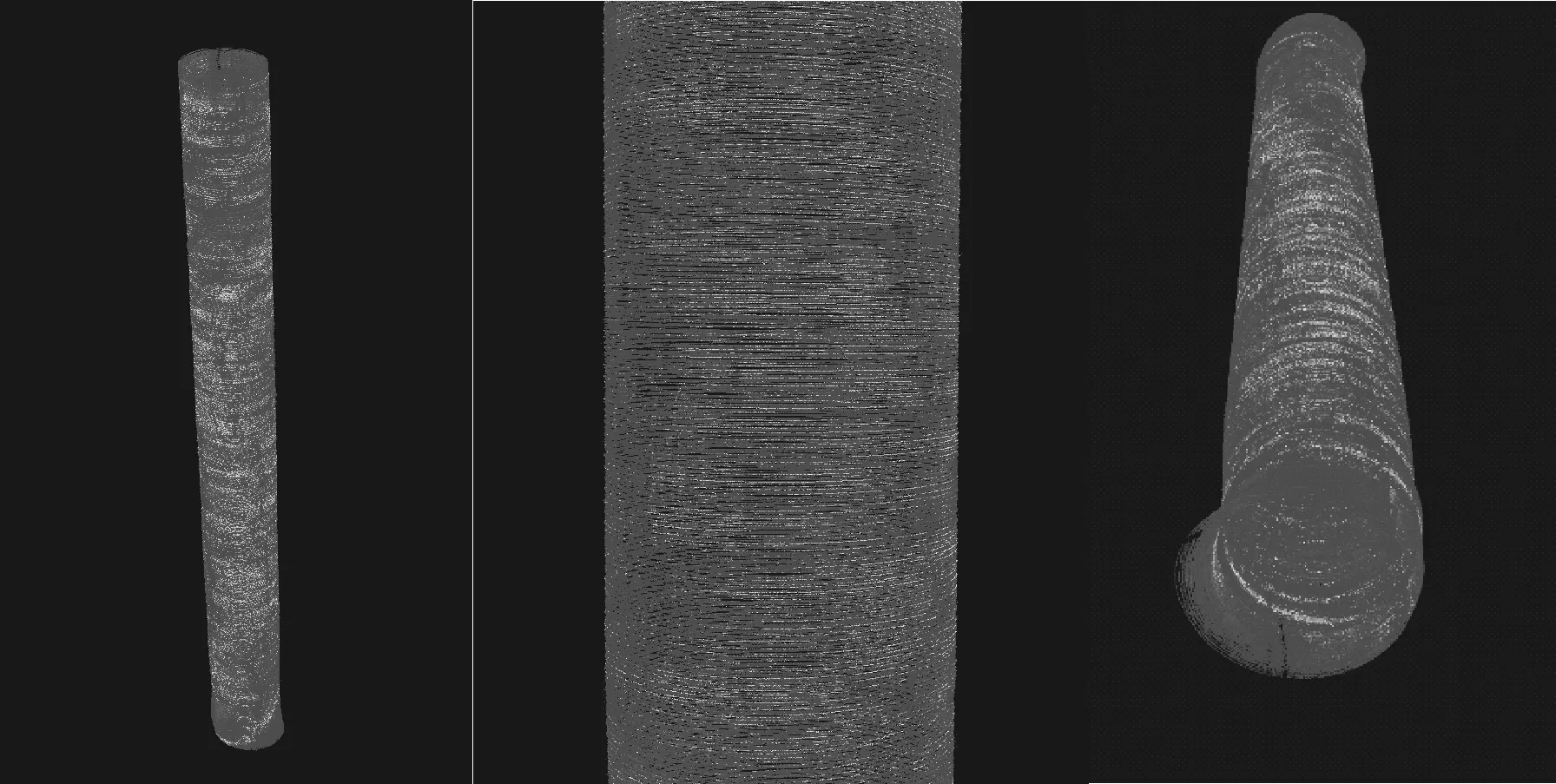
图11 全高度三维点云拼接结果Fig.11 Results of the whole 3D point cloud stitching
自主研制的全球首台竖井检测装备在云南糯扎渡水电站200 m级竖井现场采集试验表明,该装置能够很好地应用于实际生产环境下200 m级引水道竖井的数据采集检测工作。通过对获取的激光点云数据和全景影像数据的分析评判,结果表明本研究提出的引水竖井病害检测技术可以满足大型水电站百米级竖井的生产与检测维修应用需求。
4 结束语
针对大型水电站百米级垂直引水竖井数据获取与病害检测的国际性难题,本文提出的以无人系留飞艇为浮空装载平台,集成多种测绘传感器的百米级垂直竖井检测技术具有浮空能力稳定、装配快、防碰撞、控制灵活的特点。自主研制的全球首台百米级竖井病害检测装备具有环境适应性强、竖井数据获取快的优点,填补了百米级竖井检测的国际空白,具有很好的应用前景。
由于水电站引水竖井环境潮湿,入水口难以完全密闭,竖井检测过程中还将伴随着少量水沿着竖井壁往下流,导致竖井壁混凝土表面的小裂隙会被河水、泥沙填满,病害目前无法自动检测,下一步将研究裂隙灾害的自动检测。
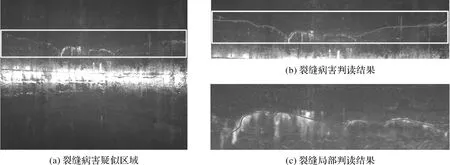
图12 2号竖井39.0~45.5 m高度处裂缝病害研判结果Fig.12 Results of defect detecting from No.2 shaft between 39.0~45.5 m
[1] 张宗亮. 糯扎渡水电站工程特点及关键技术研究[J]. 水力发电, 2005, 31(5): 4-7.
ZHANG Zongliang. The Project Characteristics of Nuozhadu Hydropower Station and Its Key Technology Research Results[J]. Water Power, 2005, 31(5): 4-7.
[2] 张宗亮, 袁友仁, 冯业林. 糯扎渡水电站高心墙堆石坝关键技术研究[J]. 水力发电, 2006, 32(11): 5-8.
ZHANG Zongliang, YUAN Youren, FENG Yelin. Study on Key Techniques of Nuozhadu’s Earth Core Rockfill Dam[J]. Water Power, 2006, 32(11): 5-8.
[3] BRENNAN T S, ZHANG Qinfen. Hydropower Advancement Project: Best Practice Catalog[R]. Revision 1.0, 1/20/2012. Chattanooga, TN: Mesa Associates, Inc., 2012.
[4] 董安国, 张仙艳, 薛宏智, 等. 混凝土表面裂缝检测的多级聚类算法[J]. 交通运输工程学报, 2013, 13(6): 7-13.
DONG Anguo, ZHANG Xianyan, XUE Hongzhi, et al. Multi-Level Clustering Algorithm for Crack Detection of Concrete Surface[J]. Journal of Traffic and Transportation Engineering, 2013, 13(6): 7-13.
[5] 单宝华, 申宇. 立体视觉方法在混凝土表面裂缝检测中的应用[J]. 工程力学, 2013, 30(9): 125-131.
SHAN Baohua, SHEN Yu. Application of Stereovision Method to Detect Concrete Surface Crack[J]. Engineering Mechanics, 2013, 30(9): 125-131.
[6] 宋福春, 王彬. 超声波法检测混凝土裂缝注胶质量[J]. 沈阳工业大学学报, 2017, 39(1): 109-115.
SONG Fuchun, WANG Bin. Ultrasonic Detection for Glue-injection Quality of Cracks in Concrete[J]. Journal of Shenyang University of Technology, 2017, 39(1): 109-115.
[7] 田晖, 辛纯涛, 张坤. 超声波单面平测法检测混凝土构件裂缝深度可靠性分析[J]. 兰州理工大学学报, 2013, 39(6): 133-136.
TIAN Hui, XIN Chuntao, ZHANG Kun. The Reliability Analysis on Single Plane Detecting of Ultrasonic Wave for the Concrete Structures Crack Depth[J]. Journal of Lanzhou University of Technology, 2013, 39(6): 133-136.
[8] 邓安仲, 赵启林, 李胜波, 等. 混凝土裂缝红外热成像分布式监测技术研究[J]. 建筑材料学报, 2013, 16(2): 284-288.
DENG Anzhong, ZHAO Qilin, LI Shengbo, et al. Study on Distributed Monitoring Technology of Infrared Thermal Image of Concrete Crack[J]. Journal of Building Materials, 2013, 16(2): 284-288.
[9] 王杰, 张勇, 李向辉, 等. 混凝土受压破坏过程声发射和红外热像特性研究[J]. 水利水电技术, 2016, 47(10): 106-108, 146.
WANG Jie, ZHAGN Yong, LI Xianghui, et al. Study on Characteristics of Acoustic Emission and Infrared Thermal Imaging during Compressive Damage of Concrete[J]. Water Resources and Hydropower Engineering, 2016, 47(10): 106-108, 146.
[10] 杨天俊. 三维激光扫描技术在拉西瓦水电站工程中的应用[J]. 西北水电, 2013(1): 4-6, 18.
YANG Tianjun. Application of 3D Laser Scanning Technology in Construction of Laxiwa Hydropower Project[J] Northwest Hydropower, 2013(1): 4-6, 18.
[11] 李小顺, 冯艺, 彭望. 三维激光扫描技术在引水隧洞检修中的应用[J]. 人民长江, 2017, 48(2): 74-78.
LI Xiaoshun, FENG Yi, PENG Wang. Application of 3D Laser Scanning Technology in Diversion Tunnel Detection[J]. Yangtze River, 2017, 48(2): 74-78.
[12] Hibbard Inshore LLC. Long Range Tailrace, Pressure Shaft and Penstock Inspection[J]. International Water Power & Dam Construction, 2005(10): 37-38.
[13] Hibbard Inshore LLC. ROV Underwater Inspection of Long Tunnels for Snowy Hydro[EB/OL]. http:∥www.hibbardinshore.com/rov-underwater-inspection-of-long-tunnels-for-snowy-hydro/.
[14] 程争刚, 张利. 一种基于无人机位姿信息的航拍图像拼接方法[J]. 测绘学报, 2016, 45(6): 698-705. DOI: 10.11947/j.AGCS.2016.20150567.
CHENG Zhenggang, ZHANG Li. An Aerial Image Mosaic Method Based on UAV Position and Attitude Information[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(6): 698-705. DOI: 10.11947/j.AGCS.2016.20150567.
[15] 吴云东, 张强. 立体测绘型双翼民用无人机航空摄影系统的实现与应用[J]. 测绘科学技术学报, 2009, 26(3): 161-164, 169.
WU Yundong, ZHANG Qiang. Implementation and Application of Aerial Photographic System by Civil Unmanned Biplane for Survey and Stereo Mapping[J]. Journal of Geomatics Science and Technology, 2009, 26(3): 161-164, 169.
[16] DE MARINA H G, PEREDA F J, GIRON-SIERRA J M, et al. UAV Attitude Estimation Using Unscented Kalman Filter and TRIAD[J]. IEEE Transactions on Industrial Electronics, 2016, 59(11): 4465-4474.
[17] NIETHAMMER U, JAMES M R, ROTHMUND S, et al. UAV-based Remote Sensing of the Super-Sauze Landslide: Evaluation and Results[J]. Engineering Geology, 2012, 128: 2-11.
[18] BALAGUER C, MONTERO R, VICTORES J G, et al. Towards Fully Automated Tunnel Inspection: A Survey and Future Trends[C]∥Proceedings of the 31st International Symposium on Automation and Robotics in Construction and Mining (ISARC). Sydney, Australia: IAARC, 2014: 19-33.
[19] MONTERO R, VICTORES J G, MARTNES S, et al. Past, Present and Future of Robotic Tunnel Inspection[J]. Automation in Construction, 2015, 59: 99-112.
[20] LOUPOS K, DOULAMIS A D, STENTOUMIS C, et al. Autonomous Robotic System for Tunnel Structural Inspection and Assessment[J]. International Journal of Intelligent Robotics and Applications, 2017. DOI: 10.1007/s41315-017-0031-9.
[21] ÖZASLAN T, SHEN SHAOJIE, MULGAONKAR Y, et al. Inspection of Penstocks and Featureless Tunnel-like Environments Using Micro UAVs[M]∥MEJIAS L, CORKE P, ROBERTS J. Field and Service Robotics. Cham: Springer, 2015: 123-136.
[22] 左建章. 关于空间信息获取技术的分析[J]. 地理信息世界, 2010, 8(3): 45-49.
ZUO Jianzhang. Analysis on Acquisition Technology of Digital City Information[J]. Geomatics World, 2010, 8(3): 45-49.
[23] 王文龙, 唐炉亮, 李清泉, 等. 一种利用飞艇航拍视频的运动车辆检测方法[J]. 武汉大学学报(信息科学版), 2010, 35(7): 786-779.
WANG Wenlong, TANG Luliang, LI Qingquan, et al. Vehicle Detection Algorithm with Video from Airborne Camera[J]. Geomatics and Information Science of Wuhan University, 2010, 35(7): 786-779.
[24] 王文龙, 李清泉. 基于蒙特卡罗算法的车辆跟踪方法[J]. 测绘学报, 2011, 40(2): 200-203.
WANG Wenlong, LI Qingquan. A Vehicle Tracking Algorithm with Monte-Carlo Method[J]. Acta Geodaetica et Cartographica Sinica, 2011, 40(2): 200-203.
[25] 彭晓东, 林宗坚. 无人飞艇低空航测系统[J]. 测绘科学, 2009, 34(4): 11-14, 20.
PENG Xiaodong, LIN Zongjian. Unmanned Airship Low Altitude System for Aerial Photogrammetry[J]. Science of Surveying and Mapping, 2009, 34(4): 11-14, 20.
猜你喜欢
工业安全与环保(2022年5期)2022-05-17 07:22:04
铁道通信信号(2020年12期)2020-03-29 06:22:00
制造技术与机床(2018年11期)2018-11-23 01:08:02
水利规划与设计(2017年8期)2017-12-20 08:24:14
太空探索(2016年12期)2016-07-18 11:13:43
百科探秘·航空航天(2015年12期)2015-11-07 07:05:51
百科探秘·航空航天(2015年11期)2015-11-07 07:05:30
百科探秘·航空航天(2015年10期)2015-11-07 07:05:09
自动化博览(2014年6期)2014-02-28 22:32:09
自动化博览(2014年4期)2014-02-28 22:31:15
